
路径规划方法、路径规划装置、电子设备以及存储介质.pdf

一吃****仪凡


1/10

2/10

3/10

4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

路径规划方法、路径规划装置、电子设备以及存储介质.pdf
本发明提供一种路径规划方法、路径规划装置、电子设备以及存储介质。路径规划方法用于规划机器人在工作现场的行驶路径,其特征在于,包括:获取工作现场的以二维表示的全局地图;将所述全局地图中的表示障碍物及距所述障碍物的外周为规定距离的范围内的区域设定为避让区域;以及将所述机器人的所述二维下的几何中心作为机器人代表点,以使所述机器人代表点在所述全局地图中不会进入所述避让区域的方式,规划所述机器人的所述行驶路径。
路径规划方法、装置、电子设备及存储介质.pdf
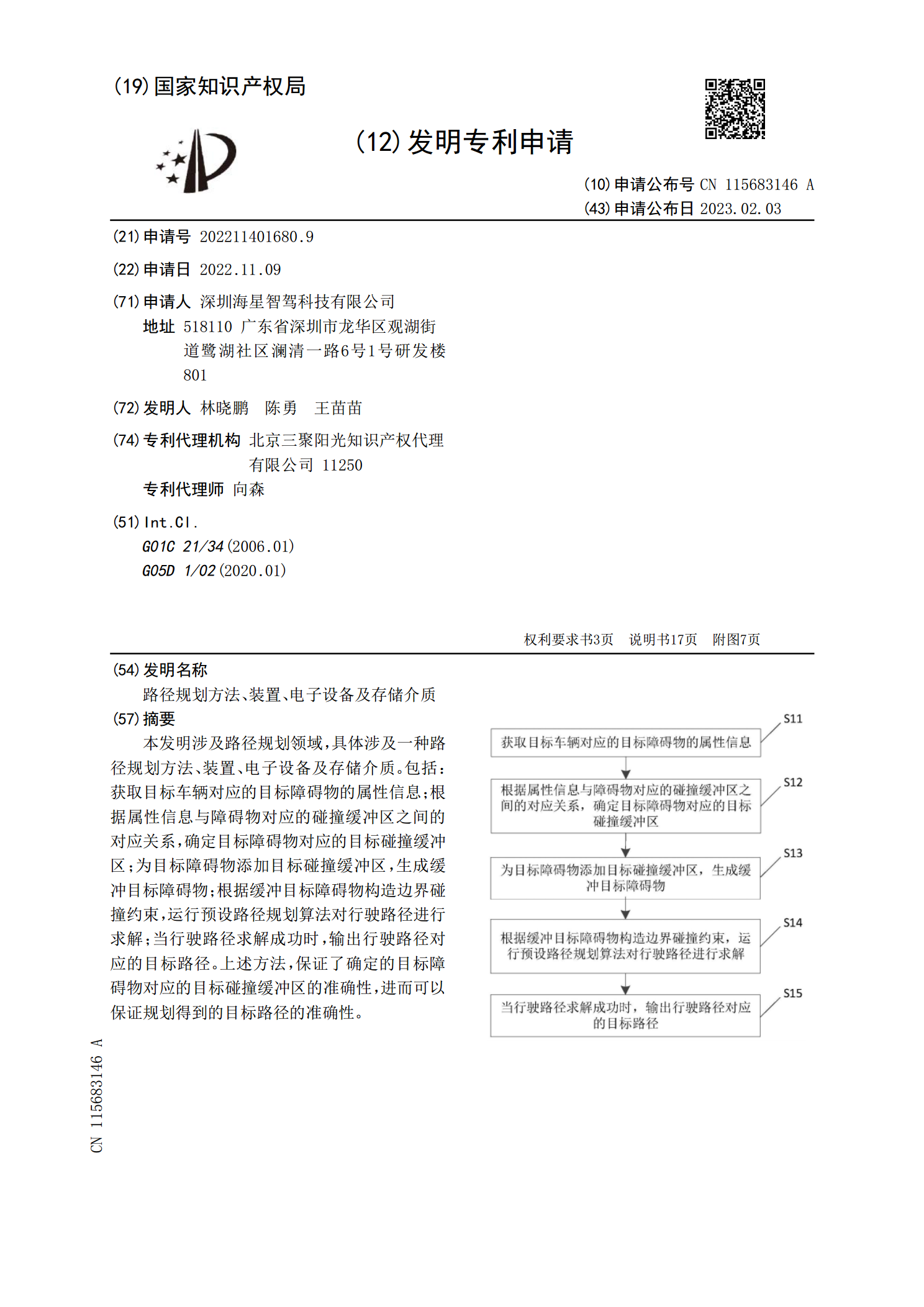
本发明涉及路径规划领域,具体涉及一种路径规划方法、装置、电子设备及存储介质。包括:获取目标车辆对应的目标障碍物的属性信息;根据属性信息与障碍物对应的碰撞缓冲区之间的对应关系,确定目标障碍物对应的目标碰撞缓冲区;为目标障碍物添加目标碰撞缓冲区,生成缓冲目标障碍物;根据缓冲目标障碍物构造边界碰撞约束,运行预设路径规划算法对行驶路径进行求解;当行驶路径求解成功时,输出行驶路径对应的目标路径。上述方法,保证了确定的目标障碍物对应的目标碰撞缓冲区的准确性,进而可以保证规划得到的目标路径的准确性。

路径规划方法、装置、电子设备及存储介质.pdf
本申请公开了一种路径规划方法、装置、电子设备及存储介质,属于导航技术领域。该方法通过基于待规划路径需要途经的多个景点,分别获取多个景点的开放时间;根据多个景点的位置,计算途经多个景点中的任意两个景点的时间,得到多个第一时间;基于前往多个景点中的任一个景点的出发时间和对应的第一时间,计算任一个景点的到达时间,得到多个到达时间;若对应的景点的到达时间处于对应的景点的开放时间,则基于对应的景点的到达时间计算在对应的景点的逗留时间,得到多个逗留时间;根据多个第一时间和多个逗留时间,进行路径规划,得到满足条件的目标
路径规划方法、装置、电子设备及存储介质.pdf
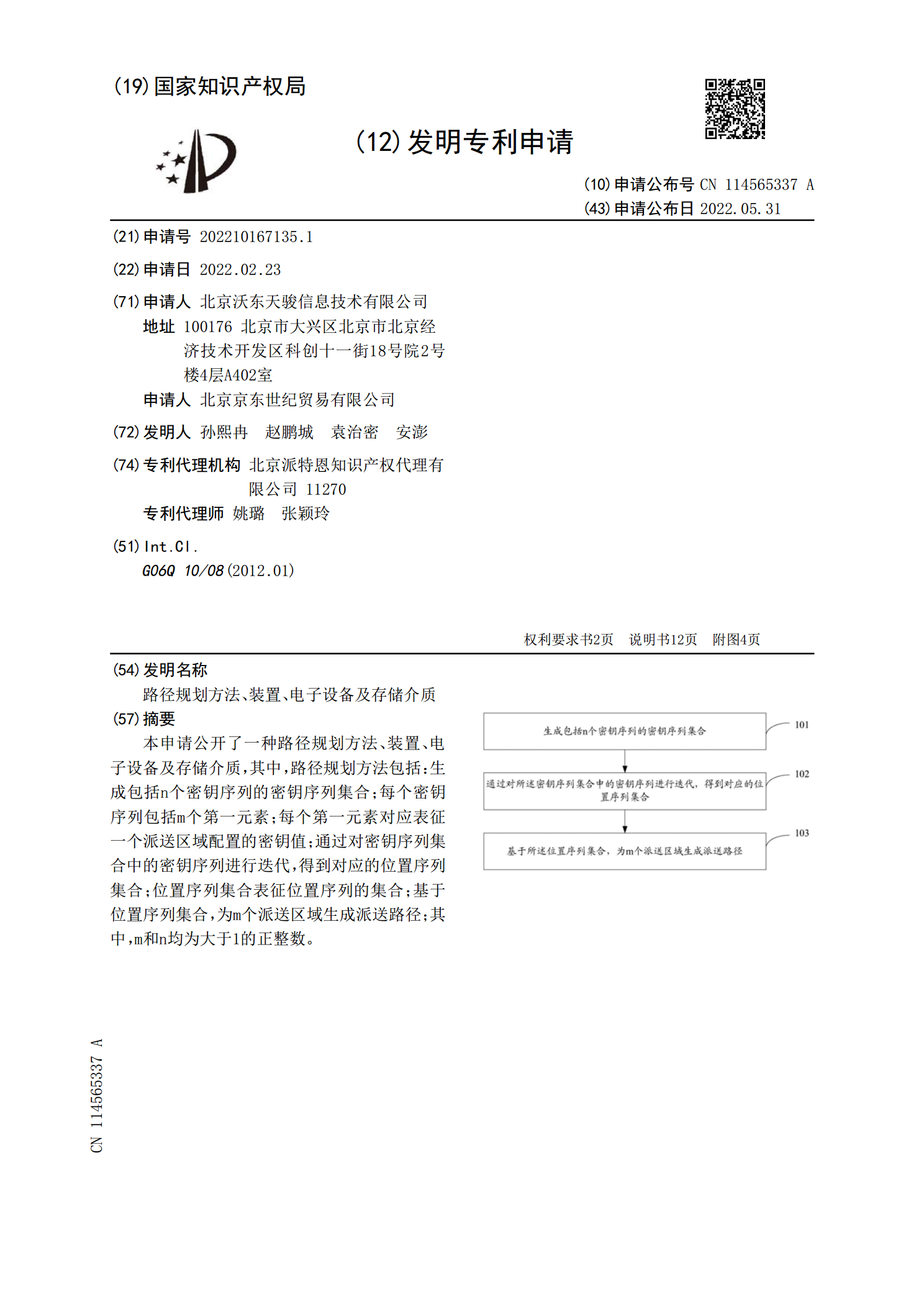
本申请公开了一种路径规划方法、装置、电子设备及存储介质,其中,路径规划方法包括:生成包括n个密钥序列的密钥序列集合;每个密钥序列包括m个第一元素;每个第一元素对应表征一个派送区域配置的密钥值;通过对密钥序列集合中的密钥序列进行迭代,得到对应的位置序列集合;位置序列集合表征位置序列的集合;基于位置序列集合,为m个派送区域生成派送路径;其中,m和n均为大于1的正整数。
路径规划的方法、装置、存储介质及电子设备.pdf
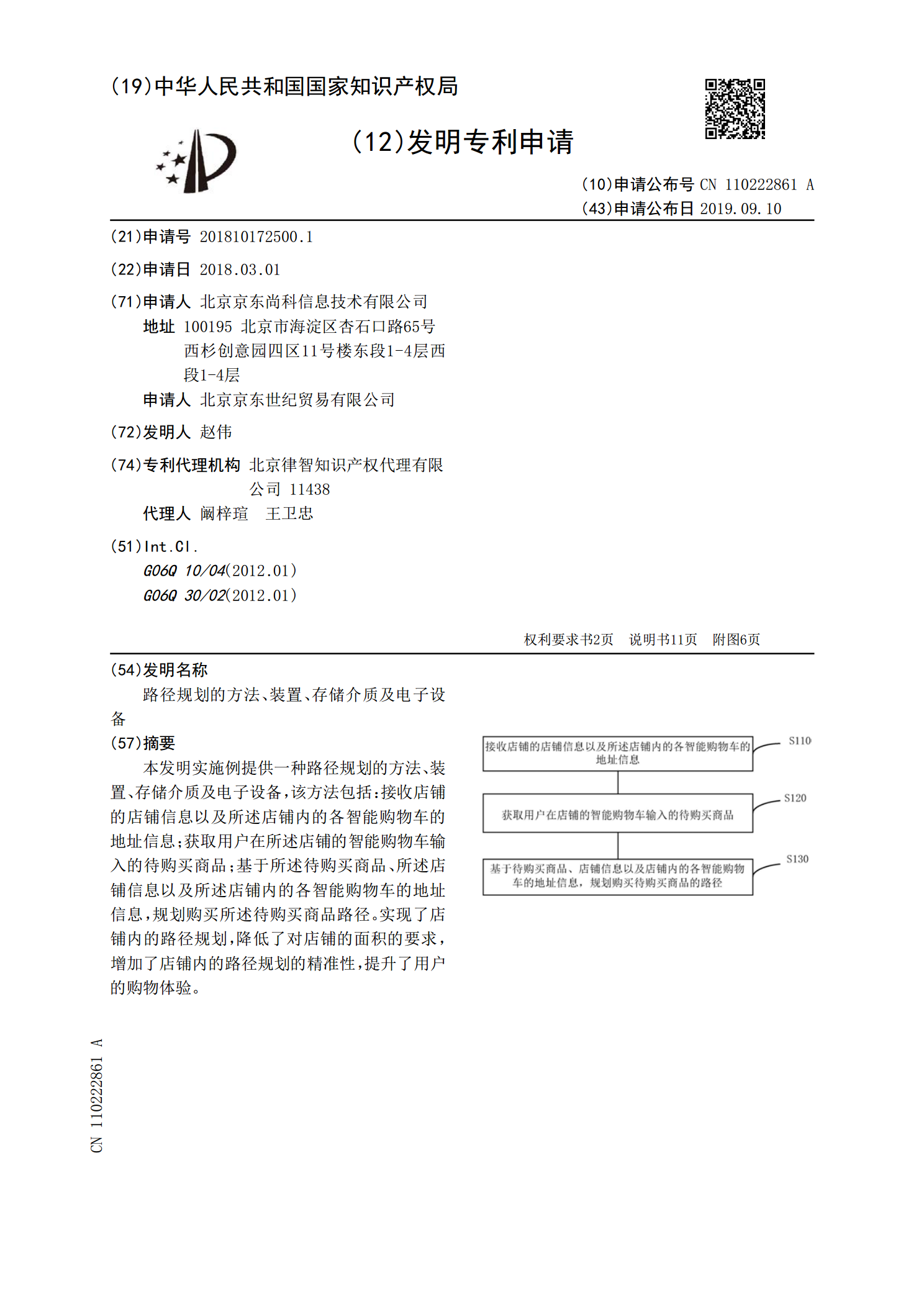
本发明实施例提供一种路径规划的方法、装置、存储介质及电子设备,该方法包括:接收店铺的店铺信息以及所述店铺内的各智能购物车的地址信息;获取用户在所述店铺的智能购物车输入的待购买商品;基于所述待购买商品、所述店铺信息以及所述店铺内的各智能购物车的地址信息,规划购买所述待购买商品路径。实现了店铺内的路径规划,降低了对店铺的面积的要求,增加了店铺内的路径规划的精准性,提升了用户的购物体验。