
无人车辆智能跟踪控制方法、系统、设备和介质.pdf

映雁****魔王


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

无人车辆智能跟踪控制方法、系统、设备和介质.pdf
本申请涉及无人车辆智能跟踪控制方法、系统、设备和介质,该方法包括:采集专家示教跟踪的轨迹数据;将轨迹数据输入深度神经网络进行深度学习,得到专家示教跟踪的初始策略;根据初始策略,利用学徒学习法进行提升学习,得到最优策略;利用最优策略对无人车辆进行跟踪控制。通过结合人工智能机器学习方法与学徒学习方法,能够通过深度学习从专家数据获得类人的初始策略后,进行学徒学习以完成奖励函数的重构过程,进而通过强化学习得到更接近专家示教跟踪(策略)的最优策略并用于无人车辆的智能跟踪控制。在无人车辆跟踪驾驶的行驶稳定性、车距控制

用于控制无人机-无人车辆系统的方法、设备及存储介质.pdf
本发明提供一种用于控制无人机‑无人车辆系统的方法、设备及存储介质,所述方法包括:获取所述无人机‑无人车辆系统的平均效用计算模型,根据所述无人机‑无人车辆系统的控制需求,获取第一限制条件、第二限制条件、第三限制条件和第四限制条件;根据所述第一限制条件、第二限制条件、第三限制条件和第四限制条件,以所述平均效用计算模型的输出量最大化为目标,分别对所述无人机‑无人车辆系统的无人机的飞行轨迹、无人机的数据发射功率、无人车辆的噪声发射功率和无人车辆的选择进行优化,并根据优化结果,对所述无人机‑无人车辆中的无人机和无人

无人机盘旋跟踪智能控制方法、装置、电子设备和存储介质.pdf
本公开提出一种无人机盘旋跟踪控制方法、装置、电子设备和存储介质,属于无人机导航、制导与控制领域。其中方法包括:在每个采样时刻,获取待跟踪目标的位置和线速度以及无人机的位置;利用所述待跟踪目标的位置和线速度以及无人机的位置,生成所述无人机的参考轨迹;根据预设的深度神经网络,利用所述无人机的参考轨迹和所述无人机的状态,得到所述无人机的控制输入,以实现所述无人机对所述待跟踪目标的环绕跟踪。本公开不需要在线求解优化问题,直接用深度神经网络控制四旋翼无人机实现对移动目标的盘旋跟踪,计算效率高,便于在可编程门阵列(F

基于无人机的车辆智能驾驶系统、方法及存储介质.pdf
本发明公开了一种基于无人机的车辆智能驾驶系统、方法及存储介质,包括:无人机子系统,用于获取车辆当前路段交通信息;云端子系统,与所述无人机子系统通信连接,用于接收所述交通信息,根据所述交通信息获取自车附近路段交通信息;车载子系统,与所述无人机子系统、所述云端子系统通信连接,用于接收自车当前路段交通信息以及附近路段交通信息,获取自车行驶路径规划信息,控制自车的运行状态。本发明利用无人机子系统来对环境进行感知,减少了智能驾驶车辆的视野盲区,从而提高了智能驾驶的安全性,同时,在所述无人机子系统的基础上再结合所述云
智能设备控制系统、方法、智能设备和存储介质.pdf
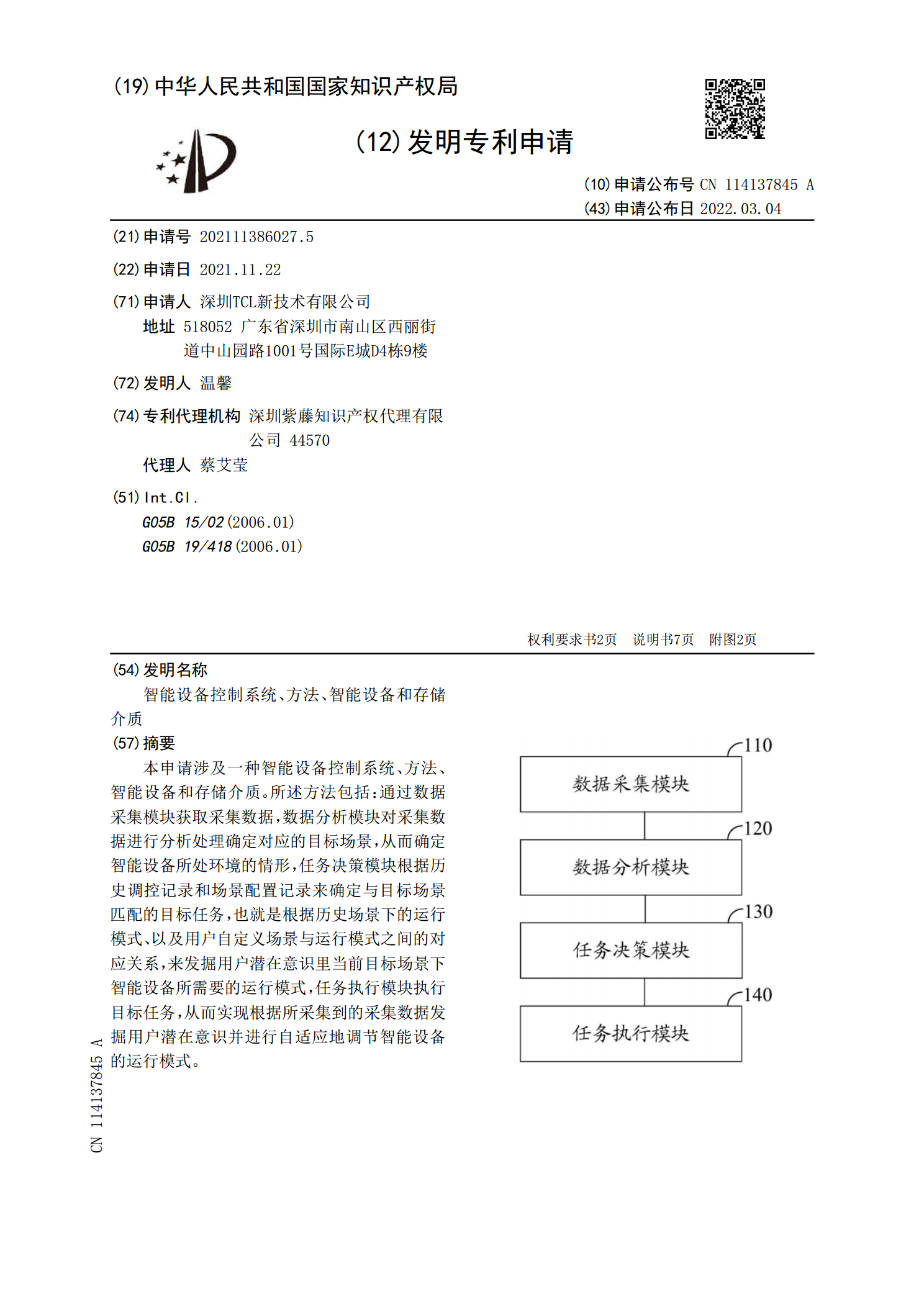
本申请涉及一种智能设备控制系统、方法、智能设备和存储介质。所述方法包括:通过数据采集模块获取采集数据,数据分析模块对采集数据进行分析处理确定对应的目标场景,从而确定智能设备所处环境的情形,任务决策模块根据历史调控记录和场景配置记录来确定与目标场景匹配的目标任务,也就是根据历史场景下的运行模式、以及用户自定义场景与运行模式之间的对应关系,来发掘用户潜在意识里当前目标场景下智能设备所需要的运行模式,任务执行模块执行目标任务,从而实现根据所采集到的采集数据发掘用户潜在意识并进行自适应地调节智能设备的运行模式。