
一种用于柔性智能化检测系统的多功能抓手机构.pdf

一条****轩吗


1/9

2/9

3/9

4/9

5/9

6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种用于柔性智能化检测系统的多功能抓手机构.pdf
本实用新型公开了一种用于柔性智能化检测系统的多功能抓手机构,属于机械工装设计领域,是一种安装于机器人机械臂末端上的用于抓取零部件的装夹设备,通过在与机械臂相连的中轴上安装了基座,基座的周向上分别设置了手指夹爪、真空吸盘和托盘抓手,可根据不同类型的零部件选择适合的抓取工具进行抓取,可通过调整角度,完成不同抓取方式的切换,从而实现不同种类零部件的抓取,为检测产线的兼容性提供了有力保障。本实用新型具有兼容性高、切换自由、经济性强的特点,且结构简单,便于运营维护,具有较高的推广应用价值。

一种用于柔性外骨骼系统的驱动单元机构.pdf
本发明涉及一种用于柔性外骨骼系统的驱动单元机构,包括基座、保护壳、电路板外罩、驱动电机、卷轴、电机固定板、卷轴支撑架、两个传动齿轮、控制电路板和开关;基座用于固定保护壳、电机固定板及卷轴支撑架;保护壳为驱动单元机构提供保护支撑,并在其上安装固定控制电路板;电路板外罩用于保护电路板;驱动电机为卷轴的转动提供动力;卷轴安装于电机固定板与卷轴支撑架之间,其上缠绕安装柔性驱动带,用于髋关节助力;两个传动齿轮用于驱动电机与卷轴之间的动力传递;电机固定板用于安装驱动电机及卷轴;卷轴支撑架用于支撑卷轴;控制电路板采集人
一种多功能柔性电动夹持机构.pdf
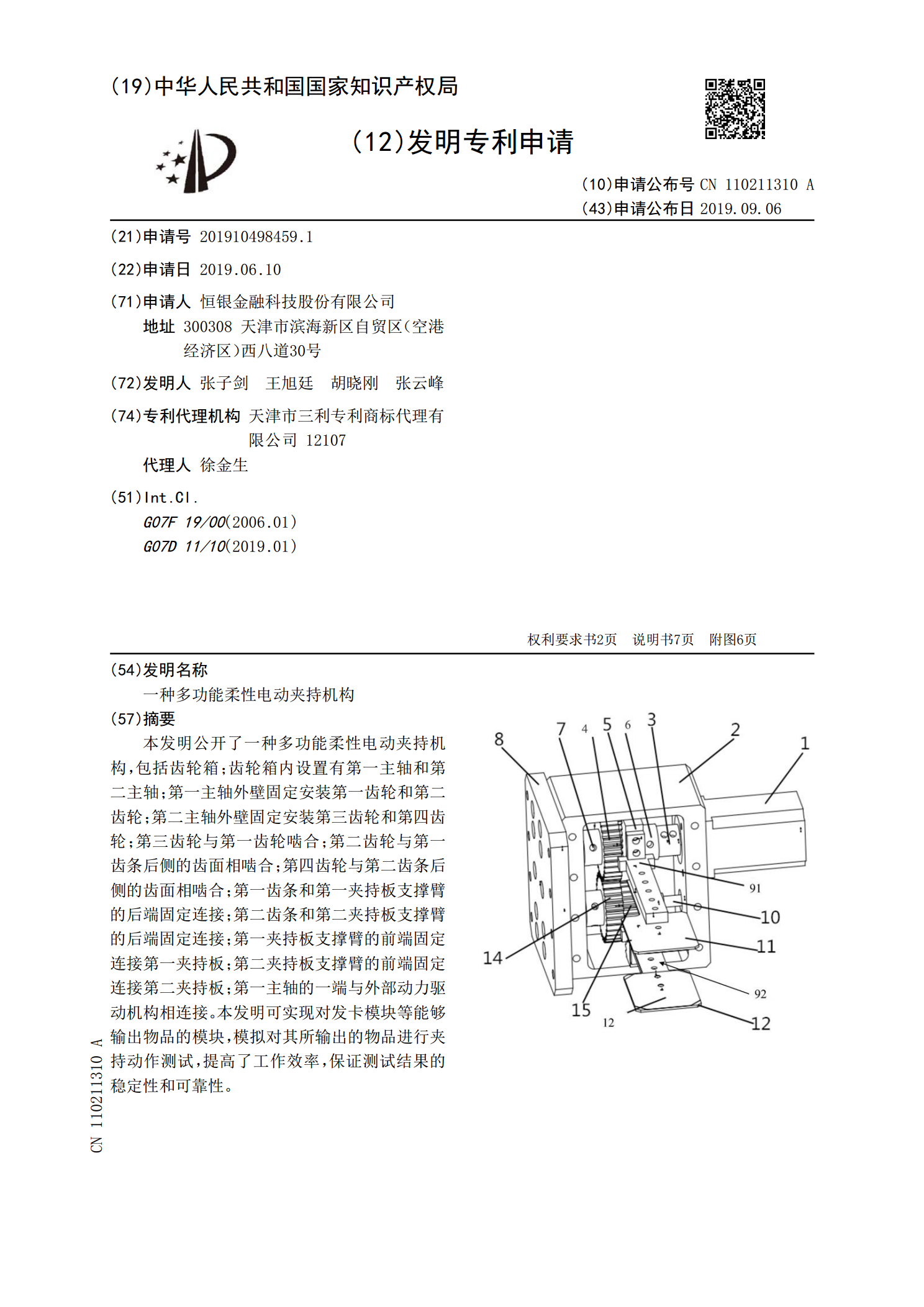
本发明公开了一种多功能柔性电动夹持机构,包括齿轮箱;齿轮箱内设置有第一主轴和第二主轴;第一主轴外壁固定安装第一齿轮和第二齿轮;第二主轴外壁固定安装第三齿轮和第四齿轮;第三齿轮与第一齿轮啮合;第二齿轮与第一齿条后侧的齿面相啮合;第四齿轮与第二齿条后侧的齿面相啮合;第一齿条和第一夹持板支撑臂的后端固定连接;第二齿条和第二夹持板支撑臂的后端固定连接;第一夹持板支撑臂的前端固定连接第一夹持板;第二夹持板支撑臂的前端固定连接第二夹持板;第一主轴的一端与外部动力驱动机构相连接。本发明可实现对发卡模块等能够输出物品的模
一种用于半挂车的新型多功能智能化可视系统.pdf
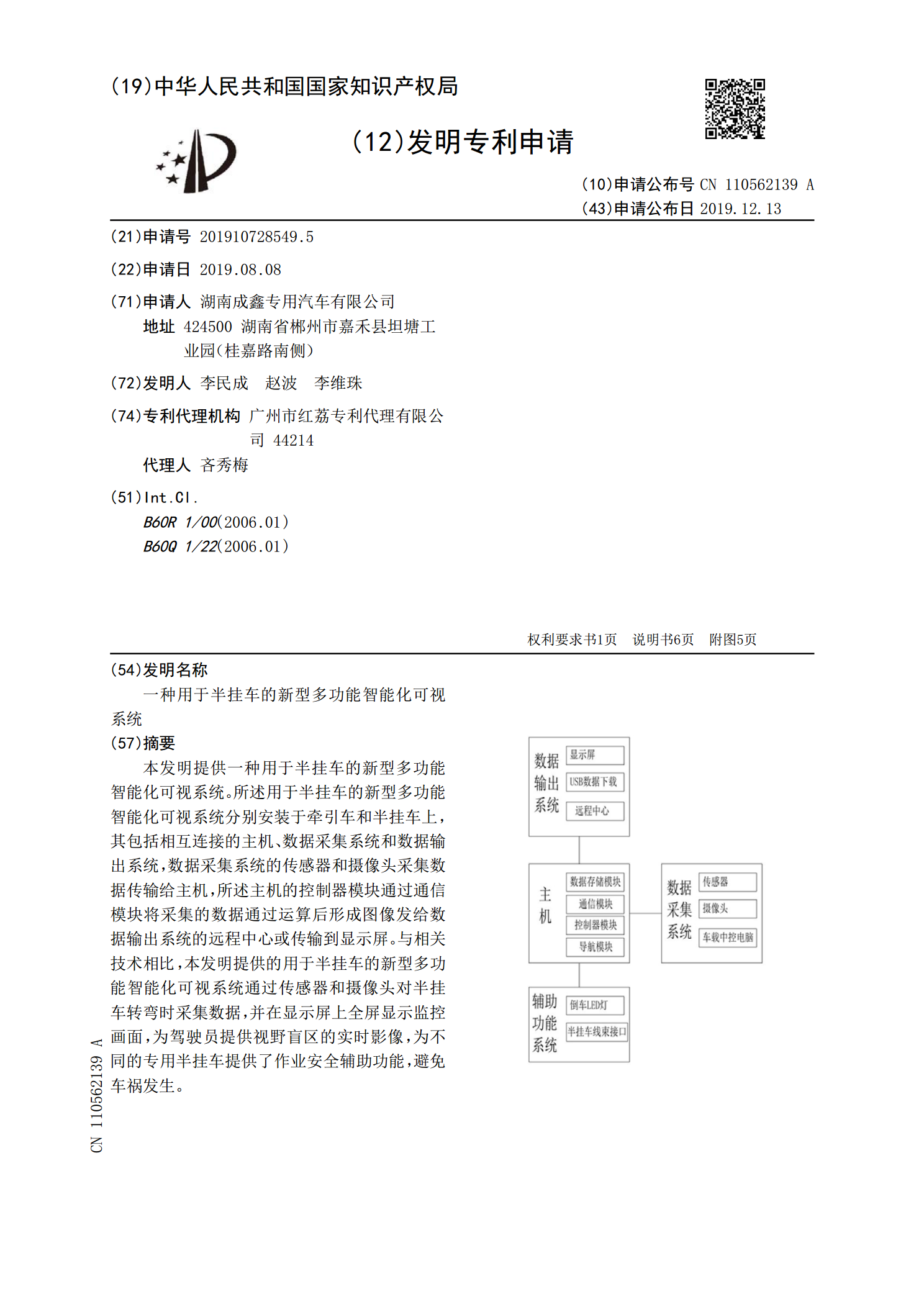
本发明提供一种用于半挂车的新型多功能智能化可视系统。所述用于半挂车的新型多功能智能化可视系统分别安装于牵引车和半挂车上,其包括相互连接的主机、数据采集系统和数据输出系统,数据采集系统的传感器和摄像头采集数据传输给主机,所述主机的控制器模块通过通信模块将采集的数据通过运算后形成图像发给数据输出系统的远程中心或传输到显示屏。与相关技术相比,本发明提供的用于半挂车的新型多功能智能化可视系统通过传感器和摄像头对半挂车转弯时采集数据,并在显示屏上全屏显示监控画面,为驾驶员提供视野盲区的实时影像,为不同的专用半挂车提

一种用于光伏组件柔性制造系统的换向机构.pdf
本发明提供了一种用于光伏组件柔性制造系统的换向机构,其包括铝型材框架、脚轮、旋转气缸、旋转盘、旋转接头、输送机构以及伺服马达,所述铝型材框架通过角码、螺杆固定,所述旋转盘安装在铝型材框架上,所述旋转气缸安装在旋转盘上,所述旋转接头与旋转气缸固定连接,所述脚轮、旋转接头与旋转机构固定连接、输送机构与铝型材框架固定连接,所述伺服马达与输送机构连接。本机构结构稳定,控制精准,输送平稳。