
发明授权-201680061912.7-MRK系统和用于控制MRK系统的方法.pdf

春兰****89

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
发明授权-201680061912.7-MRK系统和用于控制MRK系统的方法.pdf
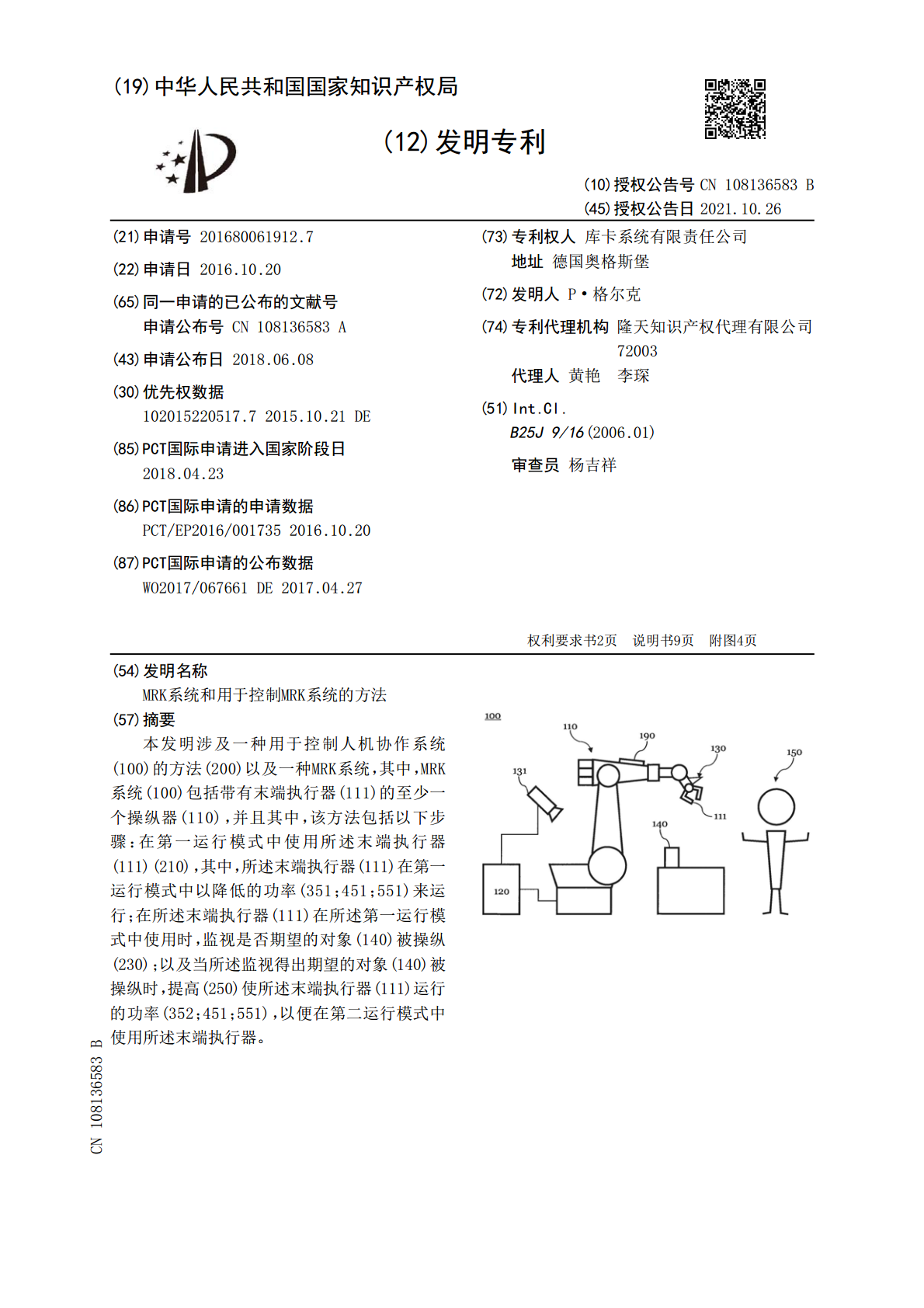
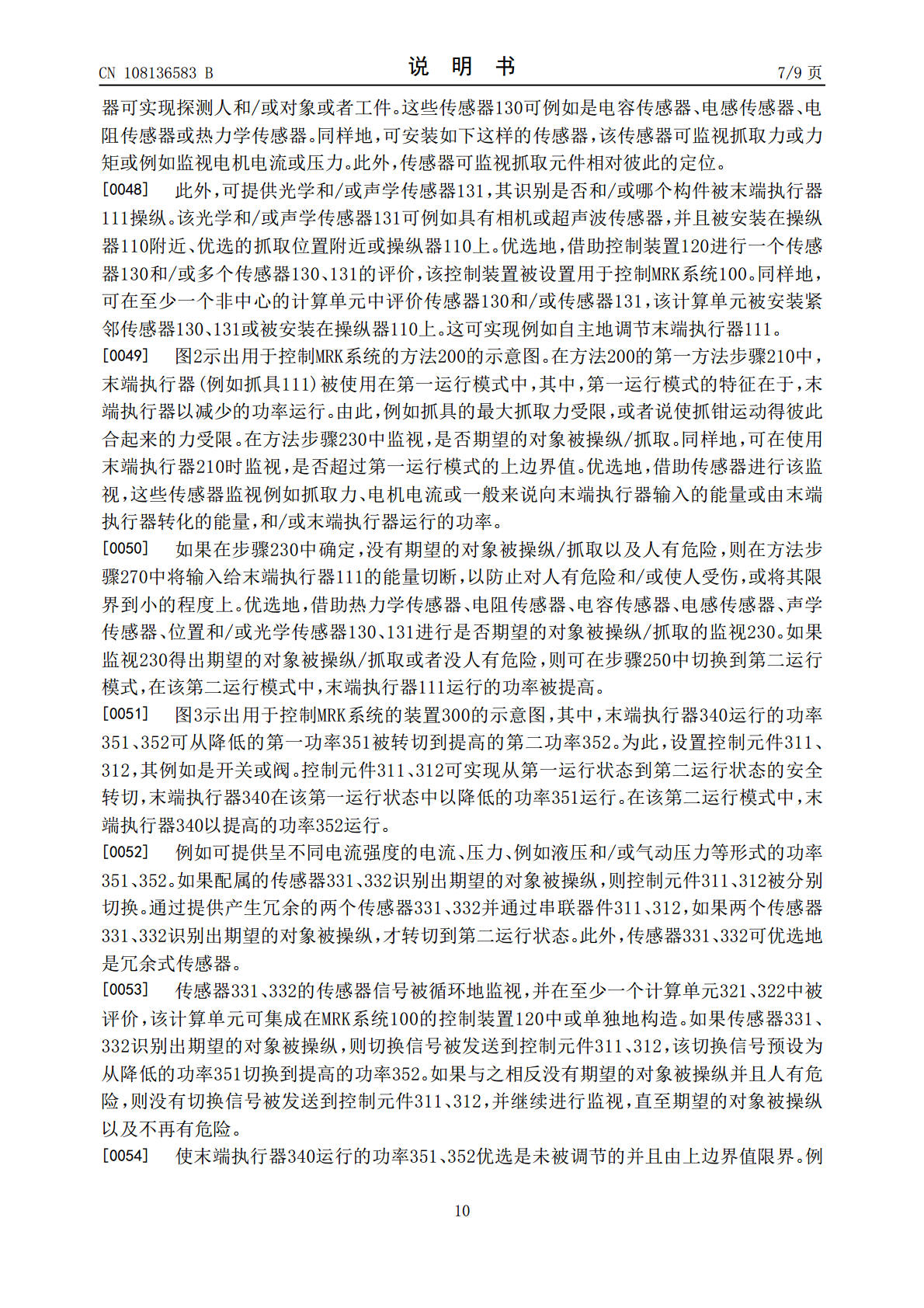
(19)中华人民共和国国家知识产权局(12)发明专利(10)授权公告号CN108136583B(45)授权公告日2021.10.26(21)申请号201680061912.7(73)专利权人库卡系统有限责任公司地址德国奥格斯(22)申请日2016.10.20堡(65)同一申请的已公布的文献号(72)发明人P·格尔克申请公布号CN108136583A(74)专利代理机构隆天知识产权代理有限公司(43)申请公布日2018.06.0872003代理人黄艳李琛(30)优先权数据102015220517.72015

发明授权-201210481268.2-用于控制航运系统运行的系统和方法.pdf
(19)中华人民共和国国家知识产权局(12)发明专利(10)授权公告号CN103136967B(45)授权公告日2016.09.14(21)申请号201210481268.2(51)Int.Cl.(22)申请日2012.11.23G08G5/00(2006.01)(65)同一申请的已公布的文献号(56)对比文件申请公布号CN103136967AUS2002165841A1,2002.11.07,US2004176887A1,2004.09.09,(43)申请公布日2013.06.05US5832465A,

发明授权-201210481187.2-用于控制航运系统运行的系统和方法.pdf
(19)中华人民共和国国家知识产权局(12)发明专利(10)授权公告号CN103136966B(45)授权公告日2017.08.25(21)申请号201210481187.2(51)Int.Cl.(22)申请日2012.11.23G08G5/00(2006.01)(65)同一申请的已公布的文献号(56)对比文件申请公布号CN103136966AUS6314361B1,2001.11.06,US2003/0167110A1,2003.09.04,(43)申请公布日2013.06.05US2007/02037
发明授权-200880019303.0-用于测试钻探控制系统的系统和方法.pdf
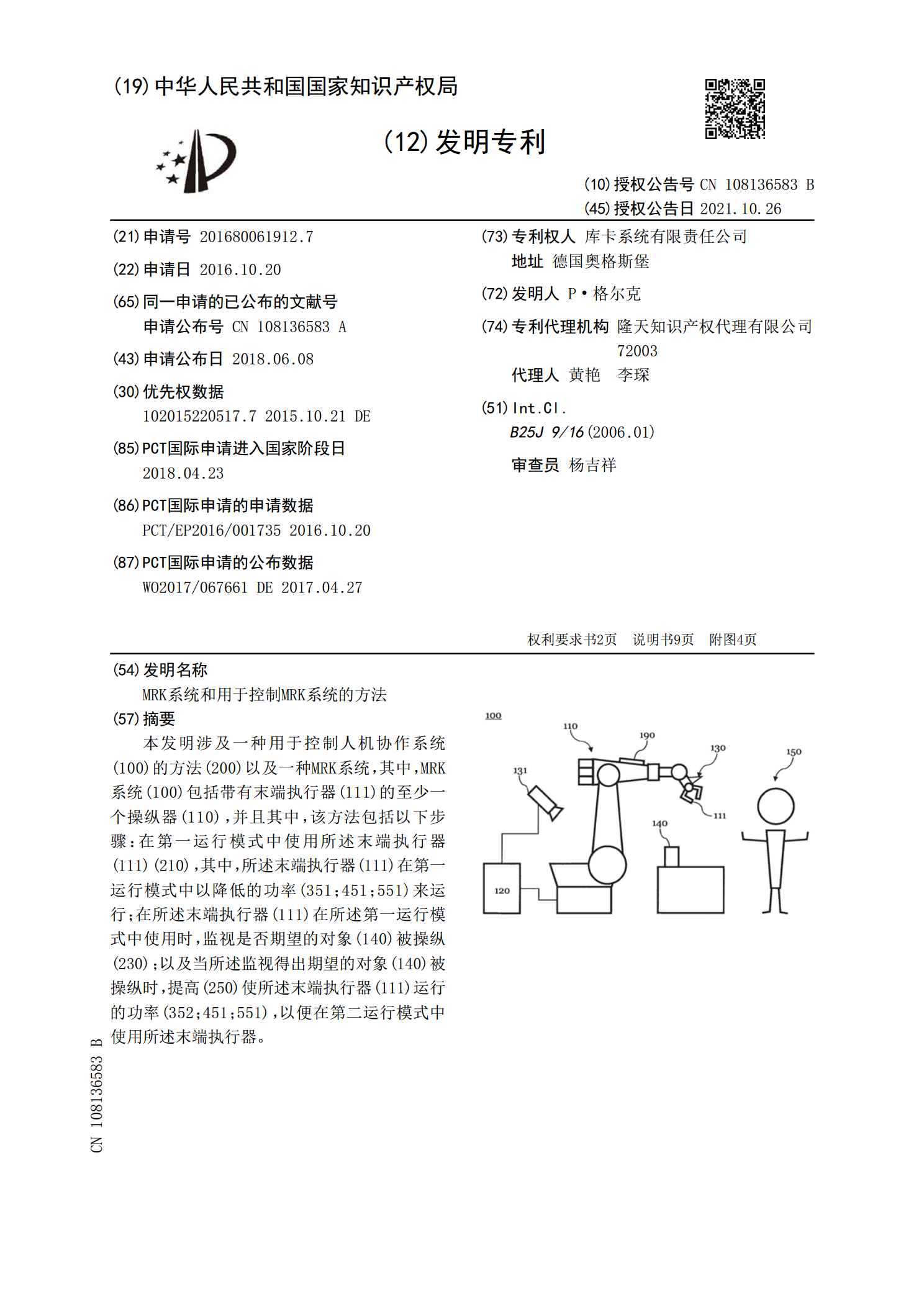
(19)中华人民共和国国家知识产权局(12)发明专利(10)授权公告号(10)授权公告号CNCN101711304101711304B(45)授权公告日2014.06.18(21)申请号200880019303.0代理人王英(22)申请日2008.04.16(51)Int.Cl.E21B44/00(2006.01)(30)优先权数据200719312007.04.16NOG05B23/00(2006.01)60/912,0572007.04.16US(56)对比文件US2005222772A1,2005.
发明授权-201410059983.6-用于燃料系统的方法和系统.pdf
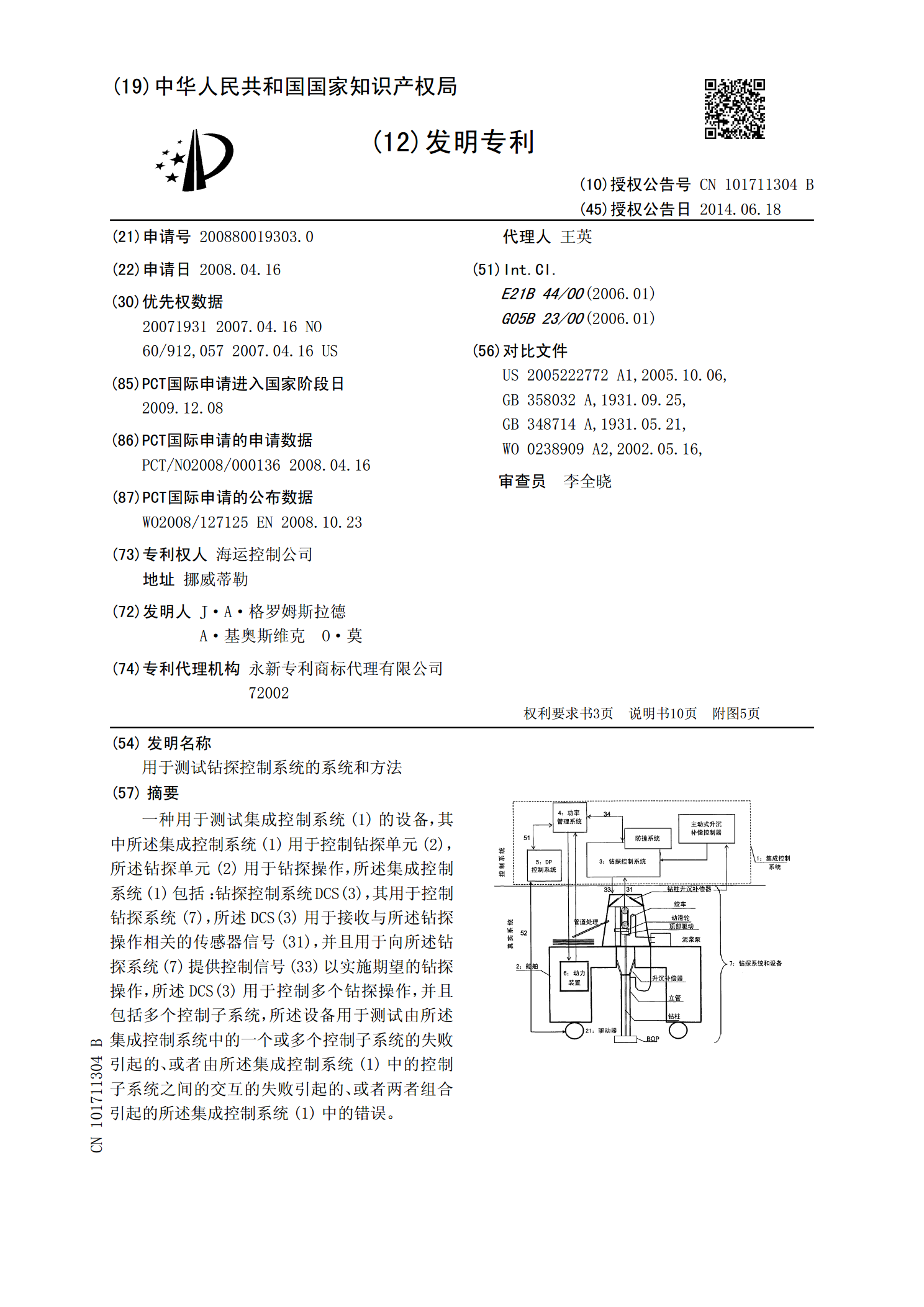
(19)中华人民共和国国家知识产权局(12)发明专利(10)授权公告号CN104005890B(45)授权公告日2018.02.06(21)申请号201410059983.6(51)Int.Cl.(22)申请日2014.02.21F02M37/08(2006.01)F02D41/02(2006.01)(65)同一申请的已公布的文献号申请公布号CN104005890A(56)对比文件CN102052170A,2011.05.11,(43)申请公布日2014.08.27EP1610125A1,2005.12.