
室内智能清洁机器人的研究.doc

你的****书屋


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

室内智能清洁机器人的研究.doc
室内智能清洁机器人的研究————————————————————————————————作者:————————————————————————————————日期:个人收集整理勿做商业用途个人收集整理勿做商业用途个人收集整理勿做商业用途绍兴文理学院元培学院文献综述题目室内智能机器人的研究专业班级机自1001班学生姓名李栋栋2012年6月3日室内智能清洁机器人李栋栋(绍兴文理学院元培学院机自1001班)1、前言随着社会的进步和发展,人们的学习、工作越来越繁忙,于是怎样更大程度地

一种用于室内清洁的智能机器人.pdf
本发明公开了一种用于室内清洁的智能机器人,包括底板,底板上有水箱支座以及支座用来固定水箱,其中支座还用来固定电机以及驱动轮,底板上开有拖把进出口以及水箱出水孔,在与水箱靠近的底板上有吸尘器头部、中部以及高速大扭矩电机,在支座及水箱支座上方是底部具有开口的水箱,水箱下方是步进电机以及有导轨导向的推块,水箱上方是带开口的过滤层,过滤层上固定丝杠步进电机,丝杠螺母上有支架,支架上设置凸缘并连有调速电机,电机通过联轴器连接拖把。优点:通过智能清洁机器人完成室内地面的拖洗、清洁等操作,通过前置过滤器、增压泵及过滤层

室内清洁机器人.pdf
本发明公开了室内清洁机器人,包括主体,该主体包括相互扣合的上盖和底座,底座的首端与尾端分别安装有导向轮和驱动轮,所述底座上还安装有位于导向轮与驱动轮之间的清洁组件,所述清洁组件包括集灰毛刷以及位于所述集灰毛刷两端的聚灰转刷;所述底座上还安装有位于所述集灰毛刷外部的集灰组件,该集灰组件包括集尘盒和集尘盒安装座,所述集尘盒扣合在所述集尘盒安装座上,且所述集尘盒与所述集尘盒安装座的连接处设置有弹性安装组件;本发明使用安全方便,通过设置可拆卸的集尘盒,便于机器人对灰尘的收集,以便于后续的集中处理;本发明弹性安装组
水下管道智能清洁机器人的研究.pptx
添加副标题目录PART01PART02早期的水下管道清洁方法智能清洁机器人的兴起技术突破与进步应用领域的拓展PART03机器人系统组成导航与定位技术清洁装置与工作方式能源与动力系统PART04优势分析面临的挑战技术瓶颈与解决方案市场前景与未来发展方向PART05案例一:某城市下水道清洁项目案例二:海洋石油管道清洁作业案例三:水力发电站管道维护案例四:跨江大桥墩柱清洁PART06安全风险评估与预防措施操作规范与安全监管国际标准与法律法规安全意识教育与培训PART07技术创新与突破方向智能化与自主化程度提升多
智能清洁机器人.pdf
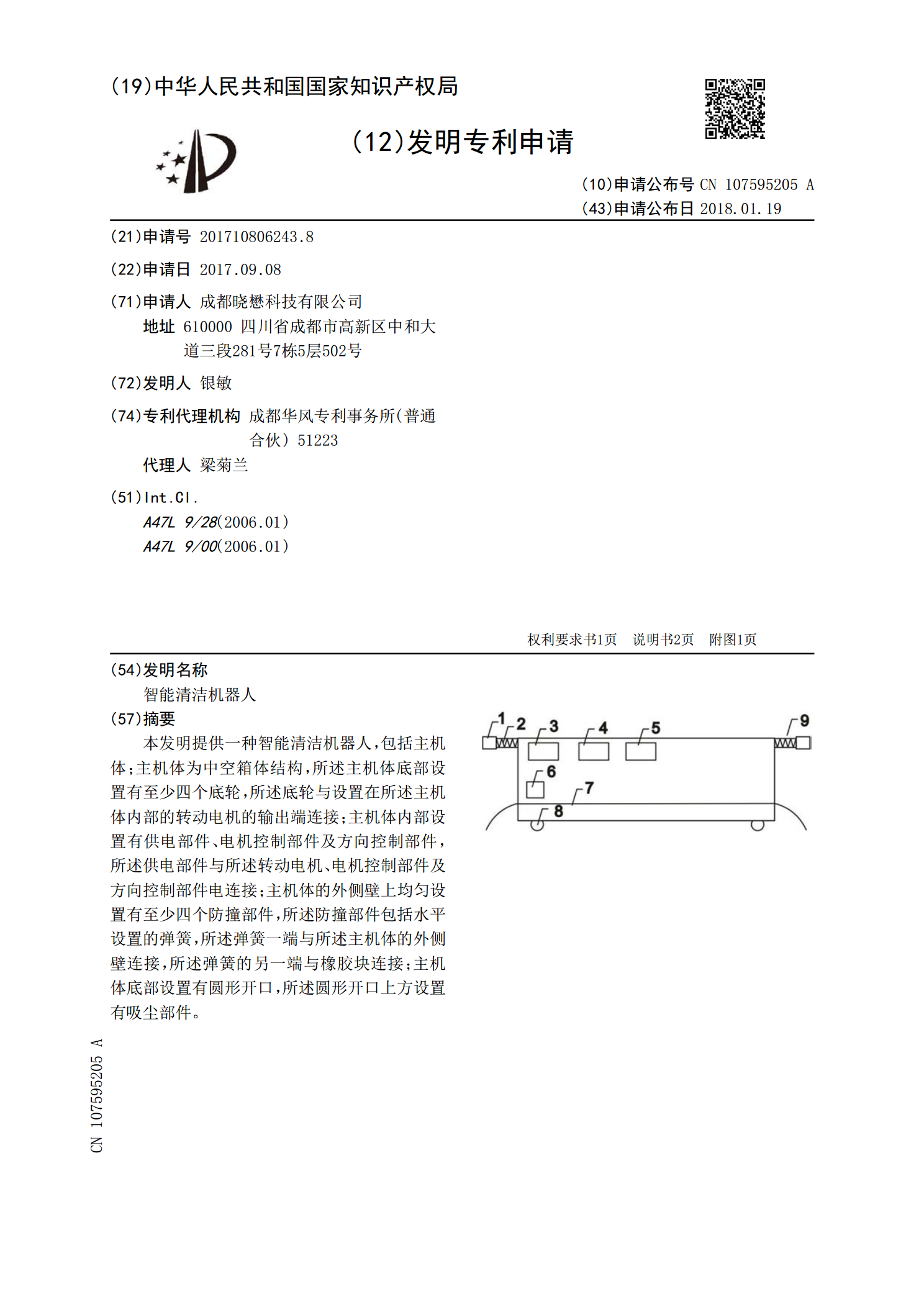
本发明提供一种智能清洁机器人,包括主机体;主机体为中空箱体结构,所述主机体底部设置有至少四个底轮,所述底轮与设置在所述主机体内部的转动电机的输出端连接;主机体内部设置有供电部件、电机控制部件及方向控制部件,所述供电部件与所述转动电机、电机控制部件及方向控制部件电连接;主机体的外侧壁上均匀设置有至少四个防撞部件,所述防撞部件包括水平设置的弹簧,所述弹簧一端与所述主机体的外侧壁连接,所述弹簧的另一端与橡胶块连接;主机体底部设置有圆形开口,所述圆形开口上方设置有吸尘部件。