
纯电动汽车的驱动电机系统详解.doc

和蔼****娘子


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

纯电动汽车的驱动电机系统详解.doc
______________________________________________________________________________________________________________精品资料纯电动汽车的驱动电机系统详解驱动电机系统是电动汽车三大核心系统之一,是车辆行驶的主要驱动系统,其特性决定了车辆的主要性能指标,直接影响车辆动力性、经济性和用户驾乘感受。一、驱动电机系统介绍驱动电机系统由驱动电机、驱动电机控制器(MCU)构成,通过高低压线束、冷却管路与整车其他系统连
纯电动汽车双电机驱动系统.pdf
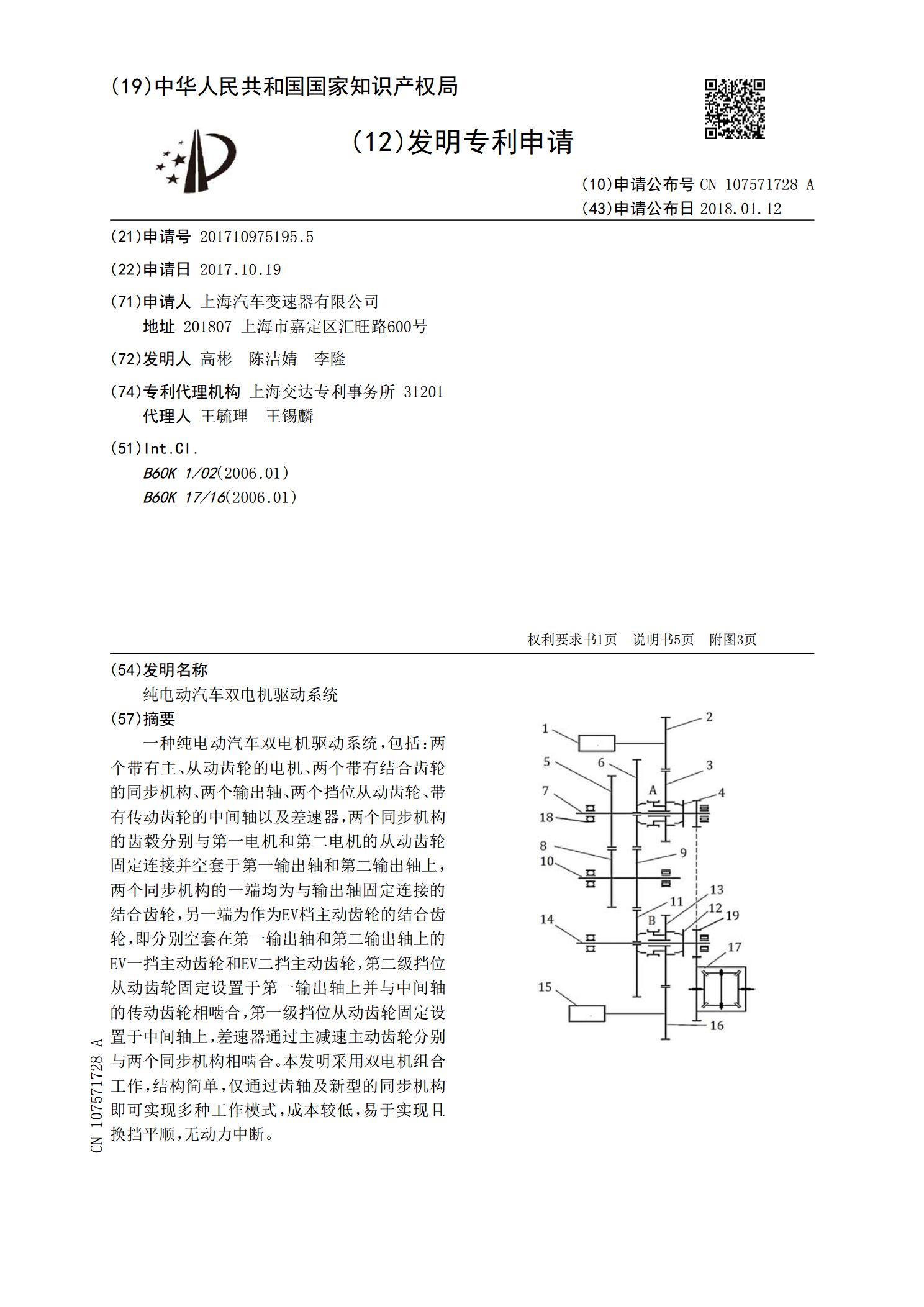
一种纯电动汽车双电机驱动系统,包括:两个带有主、从动齿轮的电机、两个带有结合齿轮的同步机构、两个输出轴、两个挡位从动齿轮、带有传动齿轮的中间轴以及差速器,两个同步机构的齿毂分别与第一电机和第二电机的从动齿轮固定连接并空套于第一输出轴和第二输出轴上,两个同步机构的一端均为与输出轴固定连接的结合齿轮,另一端为作为EV档主动齿轮的结合齿轮,即分别空套在第一输出轴和第二输出轴上的EV一挡主动齿轮和EV二挡主动齿轮,第二级挡位从动齿轮固定设置于第一输出轴上并与中间轴的传动齿轮相啮合,第一级挡位从动齿轮固定设置于中间

浅谈纯电动汽车驱动电机及控制系统.docx
浅谈纯电动汽车驱动电机及控制系统摘要:纯电动汽车是进入21世纪以来诞生的新产物,符合当今社会对于节能环保方面的需求。因此具有广阔的发展前景。对于纯电动汽车而言,其驱动电机及控制系统是最核心的要素,在全车的配置当中具有举足轻重的作用,它直接关系到全车的性能和质量。本文针对纯电动汽车驱动电机及控制系统这一课题展开讨论,为纯电动汽车驱动电机及控制系统提出一些有效的建议。关键词:纯电动汽车;驱动电机;控制系统0引言“纯电动汽车”对于今天的人来讲早已不再陌生,它有诸多优势,比如加速性能好、功率大、环保节能等,非常符

浅谈纯电动汽车驱动电机及控制系统.docx
浅谈纯电动汽车驱动电机及控制系统摘要:纯电动汽车是进入21世纪以来诞生的新产物,符合当今社会对于节能环保方面的需求。因此具有广阔的发展前景。对于纯电动汽车而言,其驱动电机及控制系统是最核心的要素,在全车的配置当中具有举足轻重的作用,它直接关系到全车的性能和质量。本文针对纯电动汽车驱动电机及控制系统这一课题展开讨论,为纯电动汽车驱动电机及控制系统提出一些有效的建议。关键词:纯电动汽车;驱动电机;控制系统0引言“纯电动汽车”对于今天的人来讲早已不再陌生,它有诸多优势,比如加速性能好、功率大、环保节能等,非常符

纯电动汽车驱动电机及控制系统的研究.docx
纯电动汽车驱动电机及控制系统的研究纯电动汽车驱动电机及控制系统的研究摘要:纯电动汽车的发展已经成为推动可持续交通领域发展的重要方向之一。而电机及控制系统作为纯电动汽车的核心组成部分,对其性能和驱动效率起着决定性的作用。因此,本文对纯电动汽车驱动电机及控制系统的研究进行了深入探讨,分析了其原理和关键技术,并对电机的控制策略进行了详细介绍。1.引言纯电动汽车可以减少对化石燃料的依赖,降低尾气排放,实现可持续出行。而电机作为纯电动汽车的动力源,其驱动效率和性能直接影响了汽车的续航里程和加速性能。因此,研究纯电动