
学案-全国-2013_七年级信息技术下册《第6课 胆小鬼机器人》学案.rar

一吃****仕龙


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
学案-全国-2013_七年级信息技术下册《第6课 胆小鬼机器人》学案.rar
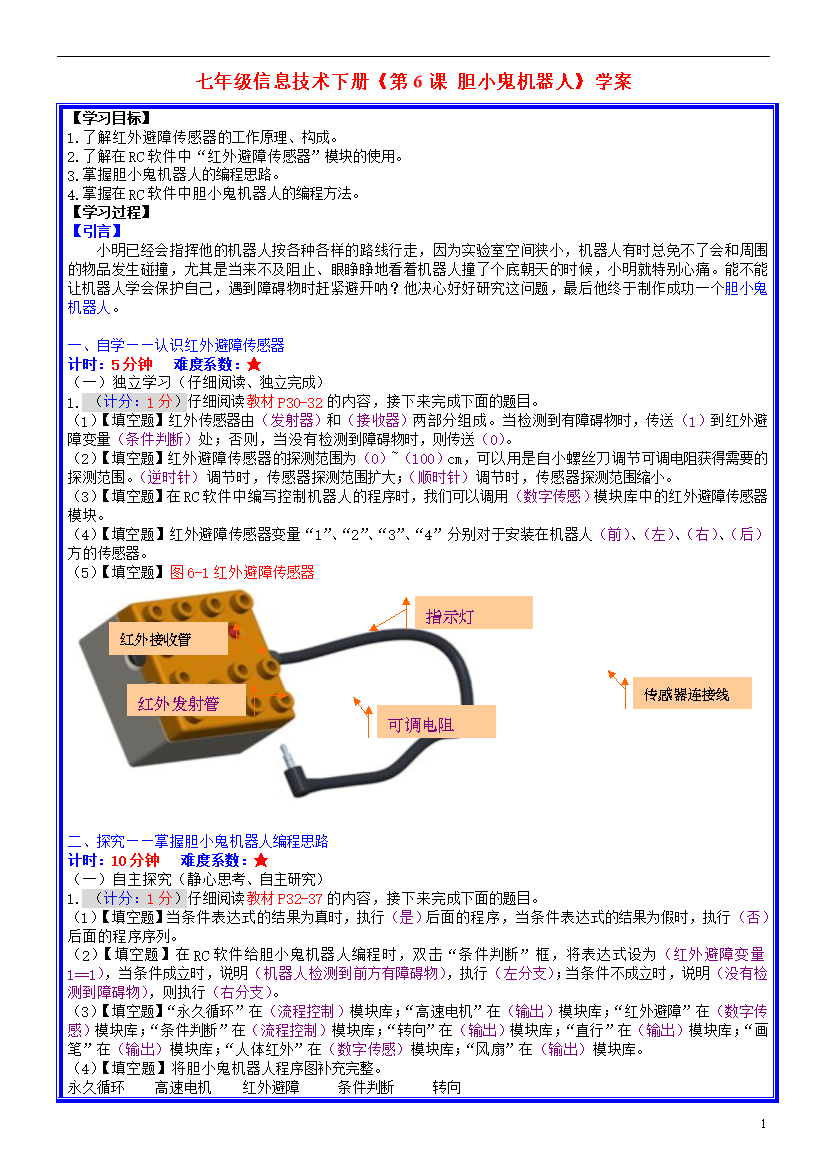
1七年级信息技术下册《第6课胆小鬼机器人》学案【学习目标】1.了解红外避障传感器的工作原理、构成。2.了解在RC软件中“红外避障传感器”模块的使用。3.掌握胆小鬼机器人的编程思路。4.掌握在RC软件中胆小鬼机器人的编程方法。【学习过程】【引言】小明已经会指挥他的机器人按各种各样的路线行走,因为实验室空间狭小,机器人有时总免不了会和周围的物品发生碰撞,尤其是当来不及阻止、眼睁睁地看着机器人撞了个底朝天的时候,小明就特别心痛。能不能让机器人学会保护自己,遇到障碍物时赶紧避开呐?
课件-全国-2013_七年级信息技术下册《第6课 胆小鬼机器人》课件.rar
【引言】【胆小鬼机器人】第6课胆小鬼机器人【学习目标】一、自学——认识红外避障传感器一、自学——认识红外避障传感器一、自学——认识红外避障传感器二、探究——掌握胆小鬼机器人编程思路二、探究——掌握胆小鬼机器人编程思路二、探究——掌握胆小鬼机器人编程思路二、探究——掌握胆小鬼机器人编程思路三、应用——制作胆小鬼机器人三、应用——制作胆小鬼机器人四、测评

学案-全国-2013_七年级信息技术下册《第5课 机器人走空心五角形》学案.rar
1七年级信息技术下册《第5课机器人走空心五角形》学案【学习目标】1.了解机器人走五角形的编程思路。2.掌握循环结构的编程方式。3.掌握画笔、直行、转向模块的参数设置。【学习过程】一、自学——编程思路分析角1角2等腰三角形计时:8分钟难度系数:★(一)独立学习(仔细阅读、静心思考)1.(计分:1分)仔细阅读教材P22-23的内容,接下来完成下面的题目。(1)【选择题】此空心五角形的角1为多少度?(A)A、36°B、60°C、72°D、90°(2)【选择题】此空心

学案-全国-2013_八年级信息技术下册《第2课 绘制简单的图形》学案.rar
1八年级信息技术下册《第2课绘制简单的图形》学案【学习目标】熟悉Flash软件的窗口,能够利用基本工具绘制简单的创意图形。【学习过程】一、学用工具箱中的工具(一)自主(限时5分钟)(1分)1.阅读教材P6页,在工具箱中选择合适的工具,在Flash舞台上绘制一面五星红旗,在操作过程中体验Flash工具箱中工具的用法。2.执行菜单【文件】——【保存】,文件名:编号姓名国旗,位置:电脑桌面。3.执行菜单【文件】——【导出】——【导出图像】,文件名:编号姓名国旗,格式:swf,位置

学案-全国-2013_八年级信息技术下册《第1课 认识Flash动画》学案.rar
1八年级信息技术下册《第1课认识Flash动画》学案【学习目标】1.认识动画的特性和分类,了解动画的发展与应用。2.认识Flash窗口结构。3.初步了解Flash工具箱中工具的用法。【学习过程】一、欣赏Flash动画(一)自学(限时5分钟)(1)打开【作业素材】文件夹,双击文件夹里的三个动画文件,并从内容结构、画面布局、颜色搭配和技术实现等方面体会作品的风格、特色。欣赏完动画后,并进行适当的分析和评价,然后与同桌交流想法,最后完成下面的填空题。(2)填空题(1分)星星历