
先进控制技术综述.doc

和蔼****娘子


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
先进控制技术综述综述.pdf
先进控制技术综述1引言在实际的工业控制过程中很多系统具有高度的非线性、多变量耦合性、不确定性、信息不完全性和大滞后等特性。对于这种系统很难获得精确的数学模型并且常规的控制无法获得满意的控制效果。面对这些复杂的工业控制产生了新的控制策略即先进控制技术。先进控制技

先进控制技术综述.doc
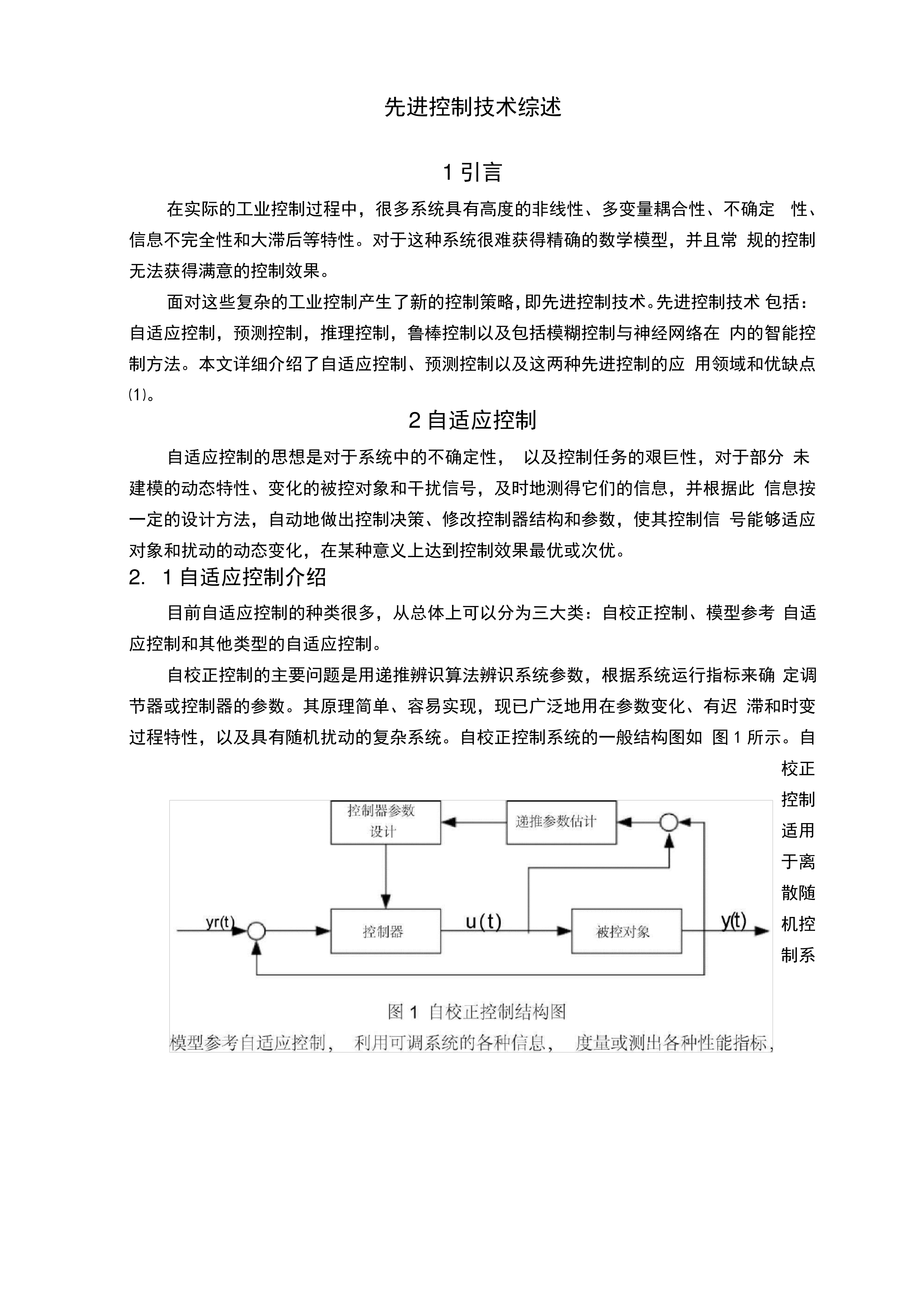
10先进控制技术综述1引言在实际的工业控制过程中,很多系统具有高度的非线性、多变量耦合性、不确定性、信息不完全性和大滞后等特性。对于这种系统很难获得精确的数学模型,并且常规的控制无法获得满意的控制效果。面对这些复杂的工业控制产生了新的控制策略,即先进控制技术。先进控制技术包括:自适应控制,预测控制,推理控制,鲁棒控制以及包括模糊控制与神经网络在内的智能控制方法。本文详细介绍了自适应控制、预测控制以及这两种先进控制的应用领域和优缺点[1]。2自适应控制自适应控制的思想是对于系统中的不确定性,以及控制任务的艰

先进控制技术综述.doc
先进控制技术综述1引言在实际的工业控制过程中,很多系统具有高度的非线性、多变量耦合性、不确定性、信息不完全性和大滞后等特性。对于这种系统很难获得精确的数学模型,并且常规的控制无法获得满意的控制效果。面对这些复杂的工业控制产生了新的控制策略,即先进控制技术。先进控制技术包括:自适应控制,预测控制,推理控制,鲁棒控制以及包括模糊控制与神经网络在内的智能控制方法。本文详细介绍了自适应控制、预测控制以及这两种先进控制的应用领域和优缺点[1]。2自适应控制自适应控制的思想是对于系统中的不确定性,以

先进控制技术在核电过程控制中的应用的综述报告.docx
先进控制技术在核电过程控制中的应用的综述报告1.引言核电站作为安全、高效、清洁的电能来源,其过程控制非常重要。过程控制需要对各个环节进行监控和控制,以确保安全、稳定、高效运行。随着科技的快速发展,先进控制技术被广泛应用于核电过程控制。本文将对先进控制技术在核电过程控制中的应用进行探讨和总结。2.先进控制技术在核电过程控制中的应用2.1模型预测控制技术模型预测控制(ModelPredictiveControl,MPC)技术是一种基于数学模型进行预测和控制的方法,该方法利用数学模型对高复杂度系统进行预测和优化

先进控制技术在连铸控制中的应用研究的综述报告.docx
先进控制技术在连铸控制中的应用研究的综述报告连铸控制是钢铁生产中的重要环节,其质量和效率直接影响着钢铁企业的生产效益。为提高连铸控制的精度和自动化程度,先进控制技术得到了广泛应用。本文将就先进控制技术在连铸控制中的应用进行综述。1.模型预测控制(MPC)模型预测控制是一种基于预测模型实现的控制策略,其主要思想是利用模型预测系统在未来一段时间内可能出现的变化情况,以及通过预测获得的信息,根据设定的目标和约束条件来产生优化控制信号。MPC在连铸过程中的应用主要有两个方面:第一是实现在线温度控制和荷重控制;第二