
基于深度学习的无人机视觉目标检测与跟踪.docx

胜利****实阿


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于深度学习的无人机视觉目标检测与跟踪.docx
基于深度学习的无人机视觉目标检测与跟踪摘要:随着我国社会经济的迅速发展,科技水平的而不断提高,无人机得到了广泛的应用,本文提出了一种基于深度学习与目标跟踪方法,综合单目视觉和双目立体视觉特点的无人机障碍物实时感知方法。关键词:无人机;视觉;目标检测;跟踪引言随着科学技术的进步,无人机的应用越来越广泛。通过在无人机上搭载高清摄像头,结合飞控系统和相关算法,可实现无人机对拍摄物体的识别检测与跟踪。但传统目标检测算法抽象和表征物体特征的能力不强,因此研究人员借助深度学习、卷积神经网络等技术提取目标特征。1视觉检

基于全方位视觉的多目标检测跟踪.doc
硕士学位论文论文题目:基于全方位视觉的多目标检测跟踪作者姓名指导教师学科专业--------------所在学院提交日期2007年11月浙江工业大学硕士学位论文基于全方位视觉的多目标检测跟踪作者姓名:指导教师:浙江工业大学软件学院2007年11月DissertationSubmittedtoZhejiangUniversityofTechnologyfortheDegreeofMasterDetectionandTrackingMultipleMovingObjectsBasedonOmnidirecti

基于视觉的运动目标检测跟踪读书随笔.docx
《基于视觉的运动目标检测跟踪》读书随笔一、书籍简介《基于视觉的运动目标检测跟踪》是一本专注于计算机视觉领域的学术著作。本书详细介绍了基于视觉的运动目标检测跟踪技术的基本原理、方法、应用及发展趋势。本书内容涵盖了从基础理论到实际应用,涉及图像预处理、目标检测、目标跟踪、运动分析等多个方面,为读者提供了一个全面、系统的学习平台。本书首先对计算机视觉领域的基础知识进行了简要介绍,为读者理解后续内容打下基础。重点阐述了运动目标检测跟踪的基本原理,包括摄像头成像原理、图像获取与处理技术等。在此基础上,本书详细介绍了
基于深度学习的瓶底喷码视觉检测方案.pdf
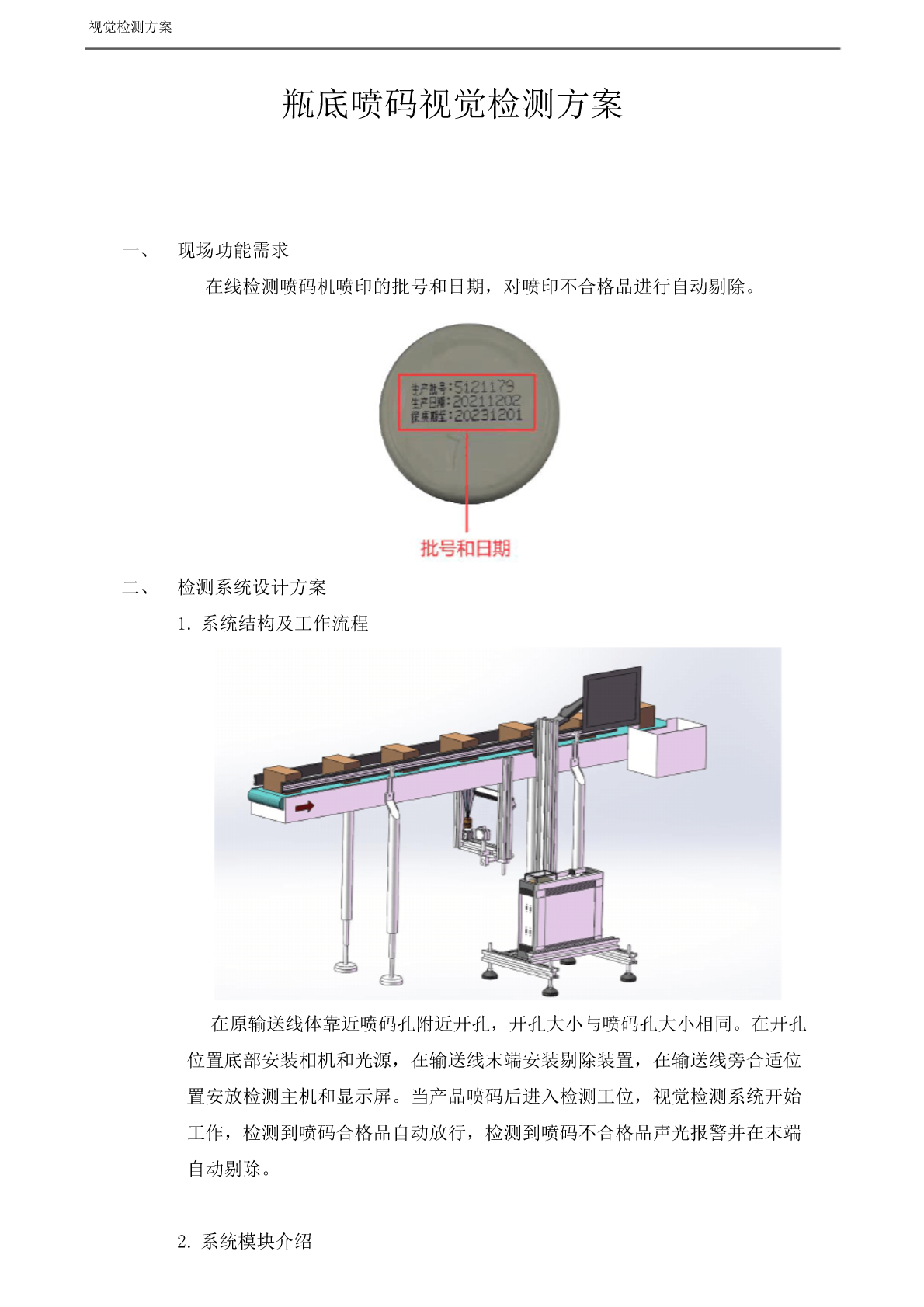
视觉检测方案瓶底喷码视觉检测方案一、现场功能需求在线检测喷码机喷印的批号和日期,对喷印不合格品进行自动剔除。二、检测系统设计方案1.系统结构及工作流程在原输送线体靠近喷码孔附近开孔,开孔大小与喷码孔大小相同。在开孔位置底部安装相机和光源,在输送线末端安装剔除装置,在输送线旁合适位置安放检测主机和显示屏。当产品喷码后进入检测工位,视觉检测系统开始工作,检测到喷码合格品自动放行,检测到喷码不合格品声光报警并在末端自动剔除。2.系统模块介绍视觉检测方案检测主机TNP-01主机使用AI技术,操作简便、更加智能。
一种基于深度学习的全景视觉水面目标检测方法.pdf
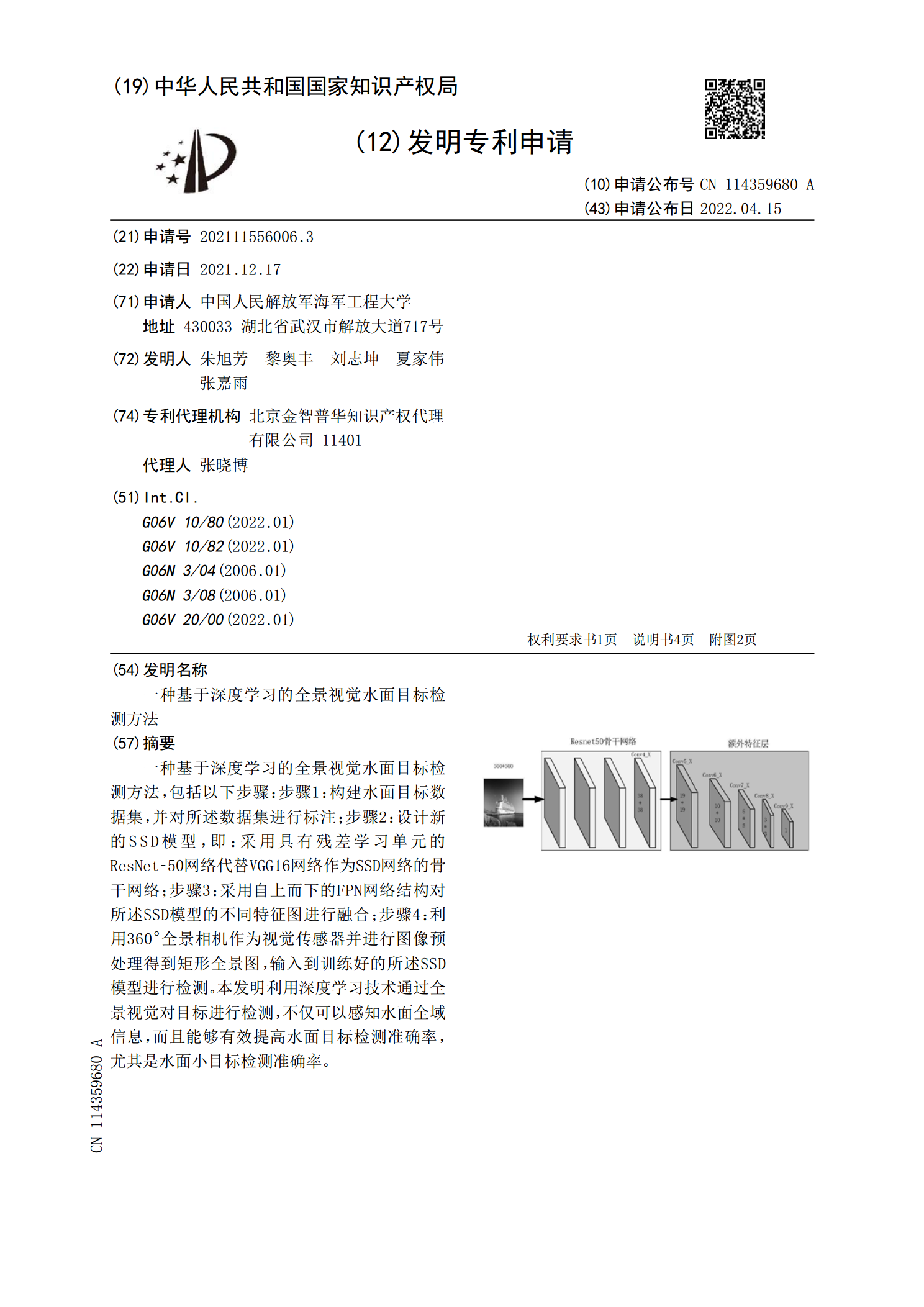
一种基于深度学习的全景视觉水面目标检测方法,包括以下步骤:步骤1:构建水面目标数据集,并对所述数据集进行标注;步骤2:设计新的SSD模型,即:采用具有残差学习单元的ResNet?50网络代替VGG16网络作为SSD网络的骨干网络;步骤3:采用自上而下的FPN网络结构对所述SSD模型的不同特征图进行融合;步骤4:利用360°全景相机作为视觉传感器并进行图像预处理得到矩形全景图,输入到训练好的所述SSD模型进行检测。本发明利用深度学习技术通过全景视觉对目标进行检测,不仅可以感知水面全域信息,而且能够有效提高水