
浅析光伏水泵控制系统.docx

胜利****实阿


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

浅析光伏水泵控制系统.docx
浅析光伏水泵控制系统摘要:本文研究的光伏水泵控制系统,围绕解决拉接市电较困难的异地用水困难问题,结合基于自动灌溉技术的环境保护和智能农业的发展,从系统效率、可靠性、稳定性、多功能性和电源模式管理方面进一步提高系统性能,着重对控制器进行分析。关键词:光伏水泵;控制系统;高性能指标1前言随着社会经济的发展,人们对能源的需求在增加,但是资源的匮乏和环境污染问题的日益严重也是社会进步的主要障碍。可再生新能源的开发利用势在必行,风力、生物能源、水力发电、太阳能等诸多新能源中,太阳能由于它的普遍性、无害性、长期性、巨

光伏水泵控制系统的研究综述报告.pptx
光伏水泵控制系统的研究综述目录添加目录项标题光伏水泵控制系统概述光伏水泵控制系统的定义与组成光伏水泵控制系统的原理与功能光伏水泵控制系统的应用场景与优势光伏水泵控制系统的技术研究光伏电池板技术电机与水泵技术控制系统技术储能技术光伏水泵控制系统的市场现状与发展趋势国内外研究现状与进展市场应用情况与需求分析未来发展趋势与挑战光伏水泵控制系统的案例分析成功案例介绍技术创新与突破点分析案例的优缺点评价与启示光伏水泵控制系统的实践经验与建议实际应用中遇到的问题与解决方案对未来研究的建议与展望提高系统性能与稳定性的措

光伏水泵控制系统的研究综述报告.docx
光伏水泵控制系统的研究综述报告随着国内农村的持续发展,特别是农村电网建设不断完善,光伏水泵控制系统越来越受到重视。光伏水泵控制系统是一种依托太阳能电池板储存太阳能热量,再利用电泵将热量转换为电能,以达到实现水泵具有自动控制、智能化控制、全自动化管理等功能的水泵控制系统。光伏水泵控制系统由太阳能光电板、水泵、电子控制器、PLC控制器还有一些配件如水管、接头等组成,上述各部件通过互联实现控制系统最终的运转。因此,光伏水泵控制系统的研究需要涉及到多个领域,包括光伏技术、水泵技术、智能控制技术、自动控制技术以及计
一种光伏水泵及其控制系统.pdf
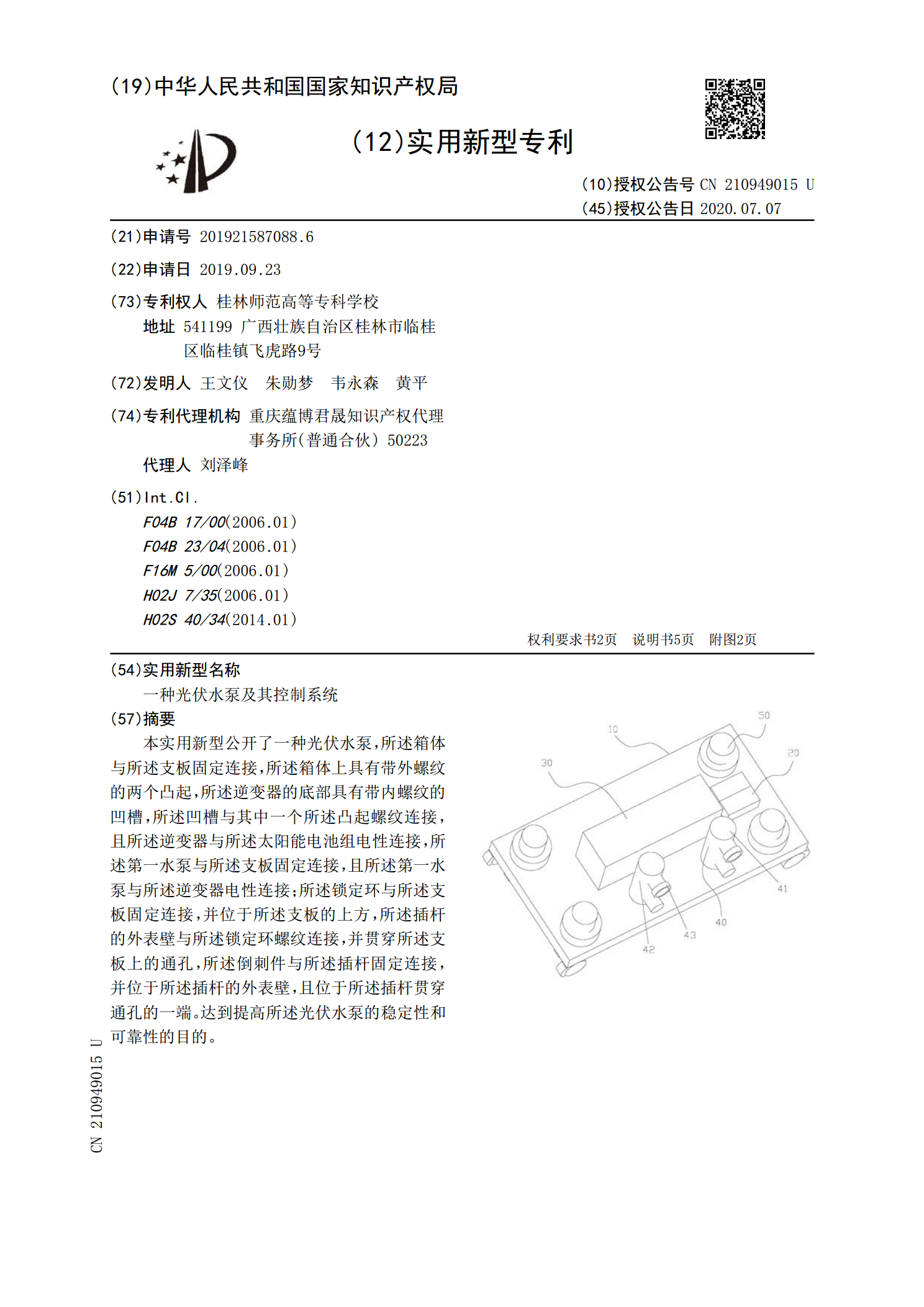
本实用新型公开了一种光伏水泵,所述箱体与所述支板固定连接,所述箱体上具有带外螺纹的两个凸起,所述逆变器的底部具有带内螺纹的凹槽,所述凹槽与其中一个所述凸起螺纹连接,且所述逆变器与所述太阳能电池组电性连接,所述第一水泵与所述支板固定连接,且所述第一水泵与所述逆变器电性连接;所述锁定环与所述支板固定连接,并位于所述支板的上方,所述插杆的外表壁与所述锁定环螺纹连接,并贯穿所述支板上的通孔,所述倒刺件与所述插杆固定连接,并位于所述插杆的外表壁,且位于所述插杆贯穿通孔的一端。达到提高所述光伏水泵的稳定性和可靠性的目

基于光伏发电的水泵控制系统的任务书.docx
基于光伏发电的水泵控制系统的任务书一、项目背景随着能源危机的加剧,人们对于新型可再生能源的研究和应用逐渐升温。光伏发电是一种利用太阳能将光转化为电能的技术,不仅具有环保、安全、无噪音、低维护成本等优点,而且还可实现分布式发电,符合可持续发展理念。近年来,光伏发电技术的应用范围不断拓宽,其中之一就是在农村地区用于驱动水泵进行灌溉、养殖等方面,为农村经济发展带来积极作用。本项目旨在设计开发基于光伏发电的水泵控制系统,实现对水泵进行自动化控制和远程监控,提高农村地区的灌溉效率和水资源利用率。二、项目任务1.进行