
薄膜型超磁致伸缩微执行器的研究现状-1.docx

胜利****实阿


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

薄膜型超磁致伸缩微执行器的研究现状-1.docx
薄膜型超磁致伸缩微执行器的研究现状摘要超磁致伸缩薄膜是一种性能优良的新型微驱动元件,在查阅大量文献的基础上,介绍了超磁致伸缩薄膜驱动的原理,综述了薄膜型超磁致伸缩微执行器的开发和最新研究成果,重点介绍了薄膜型超磁致伸缩微执行器在微流体控制系统中的应用,在线性超声微马达中的应用和在微小型行走机械中的应用,并对超磁致伸缩薄膜在微执行器中的发展提出了展望。关键词超磁致伸缩微执行器薄膜0引言微型机电系统技术是一个新兴的技术领域,而微执行器又是复杂微机电系统的关键技术之一.常用的微执行器根据其驱动方式可分为压电式、

超磁致伸缩微致动器若干基础理论及实验研究.docx
超磁致伸缩微致动器若干基础理论及实验研究超磁致伸缩微致动器(magneticshapememorymicroactuator,MSMA)是一种纳米级别的材料,并在纳米技术领域中得到了广泛应用。MSMA材料的动力学和热力学特性可以通过调节氧化镍磁体的晶体结构和磁性调节而被改善。在此基础上,本文主要从材料力学特性和主要研究领域,包括理论、模拟和实验方面介绍MSMA。第一部分:MSMA的材料力学特性在MSMA中,应力和应变可以通过对晶粒方向进行切换来产生形变,这种材料力学特性可以通过晶体结构和磁性调节来控制。磁

超磁致伸缩微机械悬臂梁系统的理论研究.docx
超磁致伸缩微机械悬臂梁系统的理论研究超磁致伸缩微机械悬臂梁系统的理论研究悬臂梁系统是现代微机械系统中一种常用的形式,而当其加入超磁致伸缩效应时,则可形成一种高灵敏度、高响应速度的微机械控制系统。本文将对超磁致伸缩微机械悬臂梁系统进行深入探讨,分析其工作原理、优缺点以及未来发展方向。一、超磁致伸缩效应的基本原理超磁致伸缩效应是指在外加磁场的作用下,介质材料的长度会发生微小的变化。这一效应最早由DavidE.Newbury在1965年首次发现,而在1996年,随着磁致伸缩效应的发现,国际上开始对这一效应进行研
超磁致伸缩执行器的驱动电路.pdf
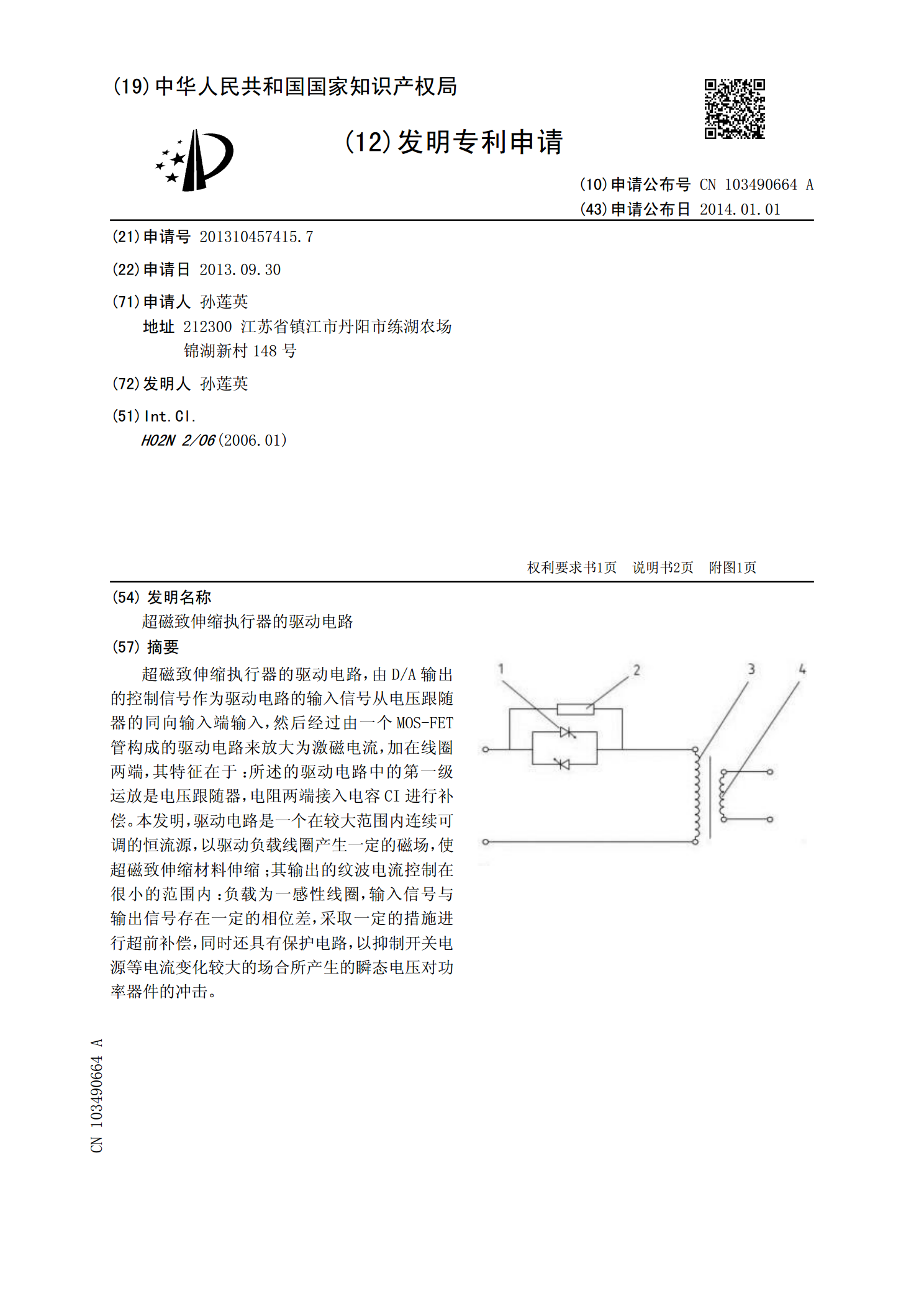
超磁致伸缩执行器的驱动电路,由D/A输出的控制信号作为驱动电路的输入信号从电压跟随器的同向输入端输入,然后经过由一个MOS-FET管构成的驱动电路来放大为激磁电流,加在线圈两端,其特征在于:所述的驱动电路中的第一级运放是电压跟随器,电阻两端接入电容CI进行补偿。本发明,驱动电路是一个在较大范围内连续可调的恒流源,以驱动负载线圈产生一定的磁场,使超磁致伸缩材料伸缩;其输出的纹波电流控制在很小的范围内:负载为一感性线圈,输入信号与输出信号存在一定的相位差,采取一定的措施进行超前补偿,同时还具有保护电路,以抑制
超磁致伸缩执行器温控系统的设计与实现.pdf
第9卷第1期华北科技学院学报2012年1月超磁致伸缩执行器温控系统的设计与实现①隋晓梅②陈文卓(华北科技学院电子信息工程学院,北京东燕郊101601)摘要:为了实现超磁致伸缩执行器(GMA)精密的位移控制,需要采取一定温控设施保证超磁致伸缩材料(GMM)工作在特定温度情况下;针对超磁致伸缩材料对温度的敏感性,在GMM智能构件的基础上提出了一种改进的强制水冷温度控制策略;利用单片机控制系统实现了对超磁致伸缩执行器的温度控制,实验结果表明了该控制策略可以保证GMA工作在恒温,验证了策略的有效性;对超磁致伸缩材