
五电平逆变器死区补偿研究.docx

篷璐****爱吗


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

五电平逆变器死区补偿研究.docx
五电平逆变器死区补偿研究摘要:本文分析了五电平逆变器“死区效应”,分析了一种基于脉冲自身的死区补偿策略,同时采用了一种改进的坐标变换法解决零电流箝位现象。最后通过实验对本文中的死区补偿方法予以验证,实验结果证实了该方法的可行性。关键词:五电平逆变器;零电流钳位;死区补偿引言由功率器件的开关特性可知,功率开关管存在开通及关断延时。三相电压源型逆变器,为了避免由于器件特性可能引起的桥臂直通现象[1],需要在逆变器桥臂触发信号中设置一定的死区时间。死区能够保障开关器件的安全运行,但会致使理想的触发脉冲与实际输出

基于五电平逆变器直接转矩控制的研究.docx
基于五电平逆变器直接转矩控制的研究摘要:传统的二电平直接转矩控制采用滞环控制可选电平数少控制精度低特别是对电机的转矩特性影响比较大。可通过采用多电平逆变器代替二电平逆变器重新调整开关表来改善控制特性。另一方面五电平产生60个有效的电压矢量如何分配这60个电压矢量也对控制效果影响很大。本文通过分析传统二电平的应用缺陷和控制电机需要圆形磁链的需求利用MATLAB/Simulink仿真验证比较了二电平和五电平对同一电机的控制效果验证了该方法的有效性。
基于五电平逆变器直接转矩控制的研究.docx
基于五电平逆变器直接转矩控制的研究摘要:传统的二电平直接转矩控制采用滞环控制可选电平数少控制精度低特别是对电机的转矩特性影响比较大。可通过采用多电平逆变器代替二电平逆变器重新调整开关表来改善控制特性。另一方面五电平产生60个有效的电压矢量如何分配这60个电压矢量也对控制效果影响很大。本文通过分析传统二电平的应用缺陷和控制电机需要圆形磁链的需求利用MATLAB/Simulink仿真验证比较了二电平和五电平对同一电机的控制效果验证了该方法的有效性。
三电平逆变器SVPWM方法的分析与研究.docx
三电平逆变器SVPWM方法的分析与研究一、概述随着电力电子技术的快速发展,逆变器作为电能转换的关键设备,在新能源发电、电机驱动、电网接入等领域发挥着重要作用。三电平逆变器因其输出电压波形质量好、效率高、电磁干扰小等优势,受到了广泛关注和研究。空间矢量脉宽调制(SVPWM)技术是三电平逆变器控制中的一种重要方法,其能够实现对逆变器的精确控制,提高系统的动态性能和稳态精度。三电平逆变器相较于传统的两电平逆变器,在输出电压的波形质量上具有显著优势。它通过在每个桥臂上增加一个中点电位,使得输出电压具有更多的电平选
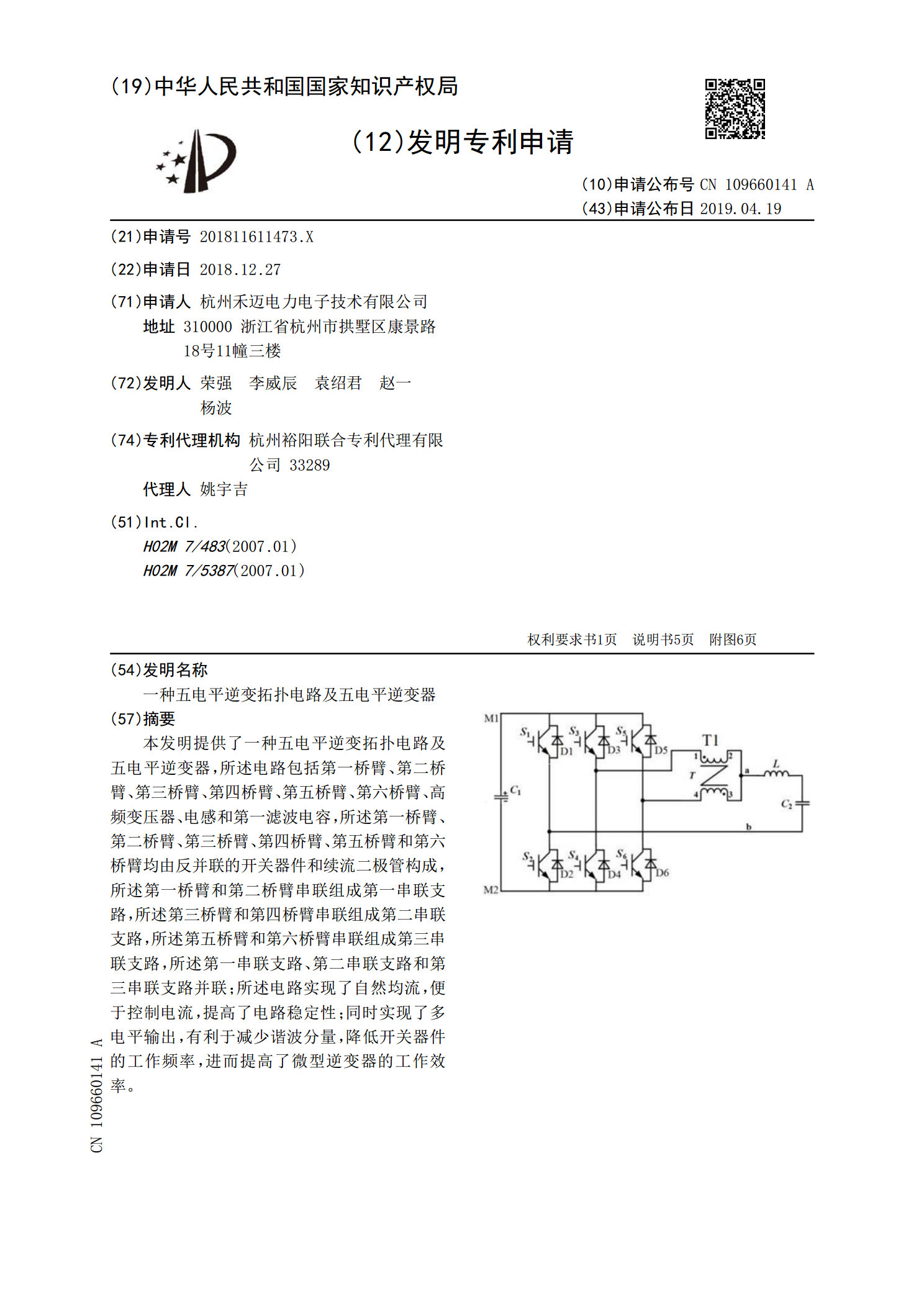
一种五电平逆变拓扑电路及五电平逆变器.pdf
本发明提供了一种五电平逆变拓扑电路及五电平逆变器,所述电路包括第一桥臂、第二桥臂、第三桥臂、第四桥臂、第五桥臂、第六桥臂、高频变压器、电感和第一滤波电容,所述第一桥臂、第二桥臂、第三桥臂、第四桥臂、第五桥臂和第六桥臂均由反并联的开关器件和续流二极管构成,所述第一桥臂和第二桥臂串联组成第一串联支路,所述第三桥臂和第四桥臂串联组成第二串联支路,所述第五桥臂和第六桥臂串联组成第三串联支路,所述第一串联支路、第二串联支路和第三串联支路并联;所述电路实现了自然均流,便于控制电流,提高了电路稳定性;同时实现了多电平输