
涵道共轴旋翼系统操纵机构设计与控制.docx

安双****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

涵道共轴旋翼系统操纵机构设计与控制.docx
南京航空航天大学毕业论文题目涵道共轴旋翼系统操纵机构设计与控制学生姓名白璟杰学号011210230学院航空宇航学院专业飞行器设计与工程班级0112102指导教师徐锦法教授二〇一六年六月南京航空航天大学本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)(题目:涵道共轴旋翼系统操纵机构设计与控制)是本人在导师的指导下独立进行研究所取得的成果。尽本人所知,除了毕业设计(论文)中特别加以标注引用的内容外,本毕业设计(论文)不包含任何其他个人或集体已经发表或撰写的成果作品。作者签名:年月日(学号)

涵道共轴旋翼系统操纵机构设计与控制.docx
南京航空航天大学毕业论文题目涵道共轴旋翼系统操纵机构设计与控制学生姓名白璟杰学号011210230学院航空宇航学院专业飞行器设计与工程班级0112102指导教师徐锦法教授二〇一六年六月南京航空航天大学本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)(题目:涵道共轴旋翼系统操纵机构设计与控制)是本人在导师的指导下独立进行研究所取得的成果。尽本人所知,除了毕业设计(论文)中特别加以标注引用的内容外,本毕业设计(论文)不包含任何其他个人或集体已经发表或撰写的成果作品。作者签名:年月日(学号)

涵道共轴旋翼系统操纵机构设计与控制.docx
南京航空航天大学毕业论文题目涵道共轴旋翼系统操纵机构设计与控制学生姓名白璟杰学号011210230学院航空宇航学院专业飞行器设计与工程班级0112102指导教师徐锦法教授二〇一六年六月南京航空航天大学本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)(题目:涵道共轴旋翼系统操纵机构设计与控制)是本人在导师的指导下独立进行研究所取得的成果。尽本人所知,除了毕业设计(论文)中特别加以标注引用的内容外,本毕业设计(论文)不包含任何其他个人或集体已经发表或撰写的成果作品。作者签名:年月日(学号)
单涵道共轴旋翼/螺旋桨碟形飞行器.pdf
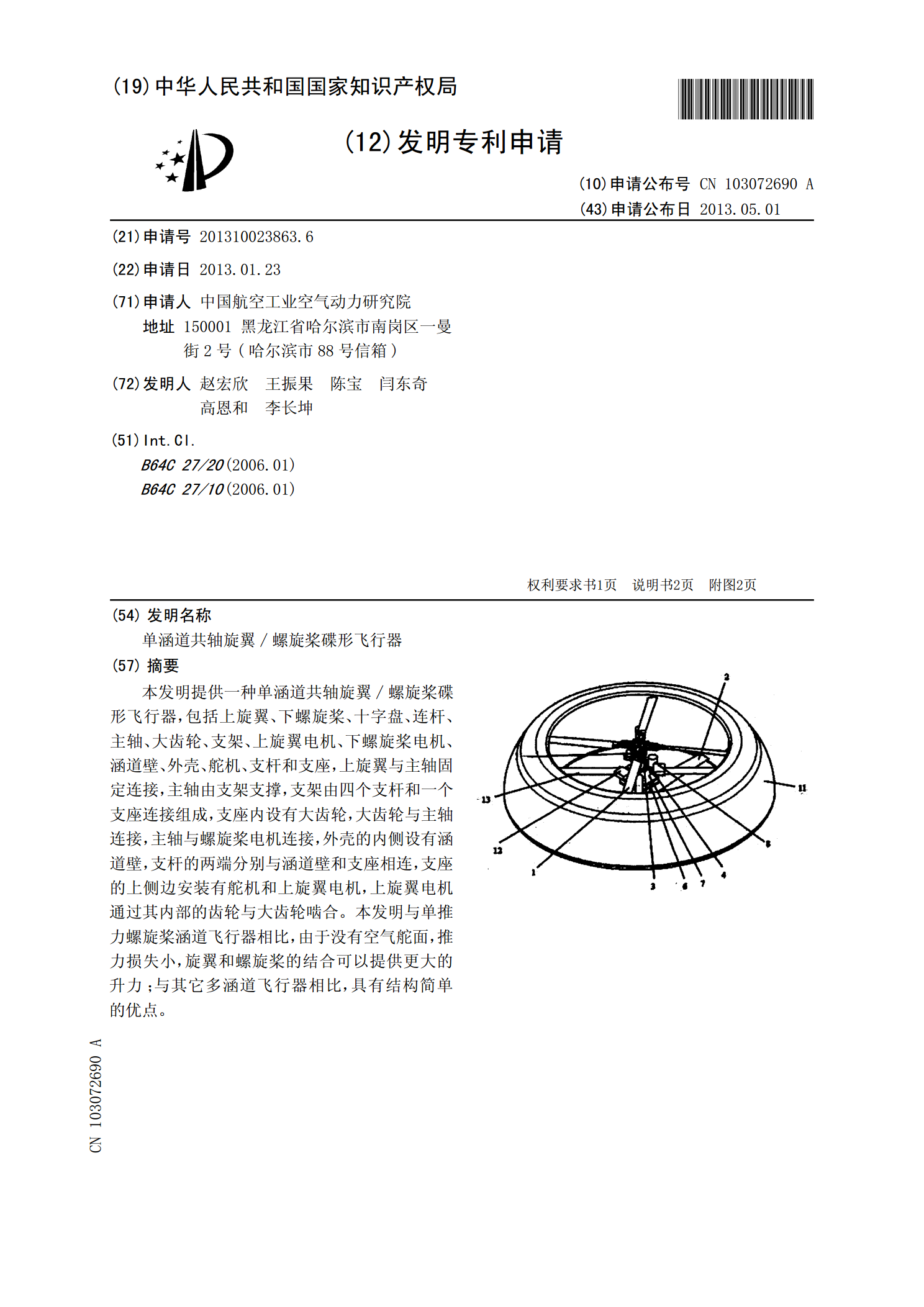
本发明提供一种单涵道共轴旋翼/螺旋桨碟形飞行器,包括上旋翼、下螺旋桨、十字盘、连杆、主轴、大齿轮、支架、上旋翼电机、下螺旋桨电机、涵道壁、外壳、舵机、支杆和支座,上旋翼与主轴固定连接,主轴由支架支撑,支架由四个支杆和一个支座连接组成,支座内设有大齿轮,大齿轮与主轴连接,主轴与螺旋桨电机连接,外壳的内侧设有涵道壁,支杆的两端分别与涵道壁和支座相连,支座的上侧边安装有舵机和上旋翼电机,上旋翼电机通过其内部的齿轮与大齿轮啮合。本发明与单推力螺旋桨涵道飞行器相比,由于没有空气舵面,推力损失小,旋翼和螺旋桨的结合可
一种用于共轴直升机模型旋翼试验的上旋翼操纵机构.pdf
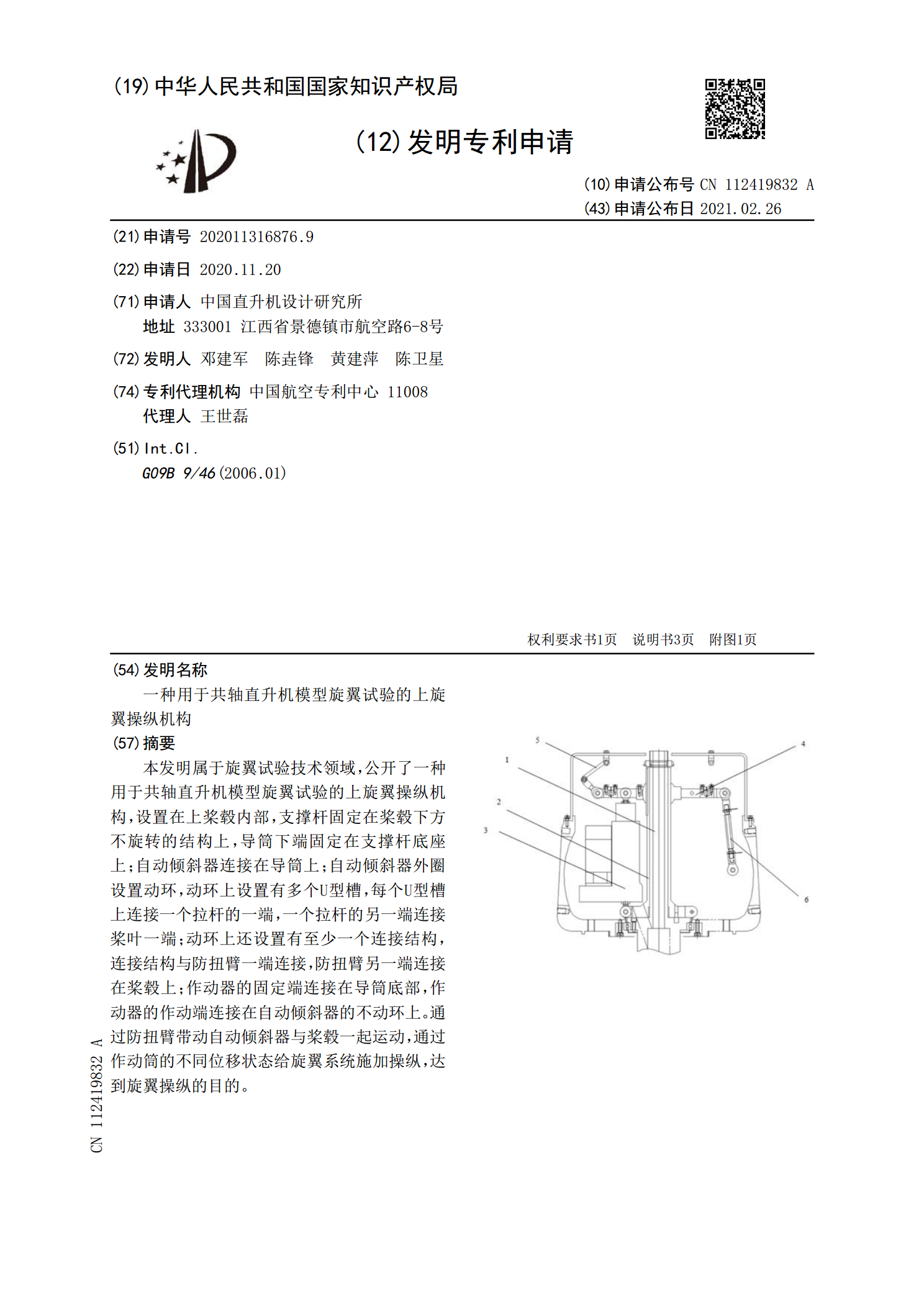
本发明属于旋翼试验技术领域,公开了一种用于共轴直升机模型旋翼试验的上旋翼操纵机构,设置在上桨毂内部,支撑杆固定在桨毂下方不旋转的结构上,导筒下端固定在支撑杆底座上;自动倾斜器连接在导筒上;自动倾斜器外圈设置动环,动环上设置有多个U型槽,每个U型槽上连接一个拉杆的一端,一个拉杆的另一端连接桨叶一端;动环上还设置有至少一个连接结构,连接结构与防扭臂一端连接,防扭臂另一端连接在桨毂上;作动器的固定端连接在导筒底部,作动器的作动端连接在自动倾斜器的不动环上。通过防扭臂带动自动倾斜器与桨毂一起运动,通过作动筒的不同