
驻车制动自动调整系统的气路仿真研究.docx

一只****爱敏


1/5

2/5

3/5

4/5

5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

驻车制动自动调整系统的气路仿真研究.docx
驻车制动自动调整系统的气路仿真研究1驻车制动自动调整系统方案设计1.1驻车制动自动调整工艺①预打紧:利用驻车制动手柄操纵机构将制动手柄推至超过第二棘轮齿,利用调整螺母操纵机构对调整螺母进行拧紧,线位移传感器检测制动手柄运动位移,运动至第二棘轮齿处,停止拧紧,手柄回位。②实现制动器间隙自调:利用驻车制动手柄操纵机构将制动手柄提至第八棘轮齿处,再退回原位,如此反复3次。③终打紧:利用驻车制动手柄操纵机构将制动手柄再次推至超过第二棘轮齿,利用调整螺母操纵机构对调整螺母进行第二次拧紧,线位移传感器监测到手柄处于第

驻车制动自动调整系统的气路仿真研究.docx
驻车制动自动调整系统的气路仿真研究1驻车制动自动调整系统方案设计1.1驻车制动自动调整工艺①预打紧:利用驻车制动手柄操纵机构将制动手柄推至超过第二棘轮齿,利用调整螺母操纵机构对调整螺母进行拧紧,线位移传感器检测制动手柄运动位移,运动至第二棘轮齿处,停止拧紧,手柄回位。②实现制动器间隙自调:利用驻车制动手柄操纵机构将制动手柄提至第八棘轮齿处,再退回原位,如此反复3次。③终打紧:利用驻车制动手柄操纵机构将制动手柄再次推至超过第二棘轮齿,利用调整螺母操纵机构对调整螺母进行第二次拧紧,线位移传感器监测到手柄处于第

驻车制动自动调整系统可靠性分析.docx
驻车制动自动调整系统可靠性分析Title:ReliabilityAnalysisofAutomaticAdjustingBrakeSystemsinParkingIntroduction:Withtheadventofadvancedtechnologiesintheautomotiveindustry,parkingbrakesystemshaveevolvedtoincorporateautomaticadjustingmechanisms.Theseautomaticsystemsaimtoimpr
驻车制动机构、驻车制动系统、自动变速箱及汽车.pdf
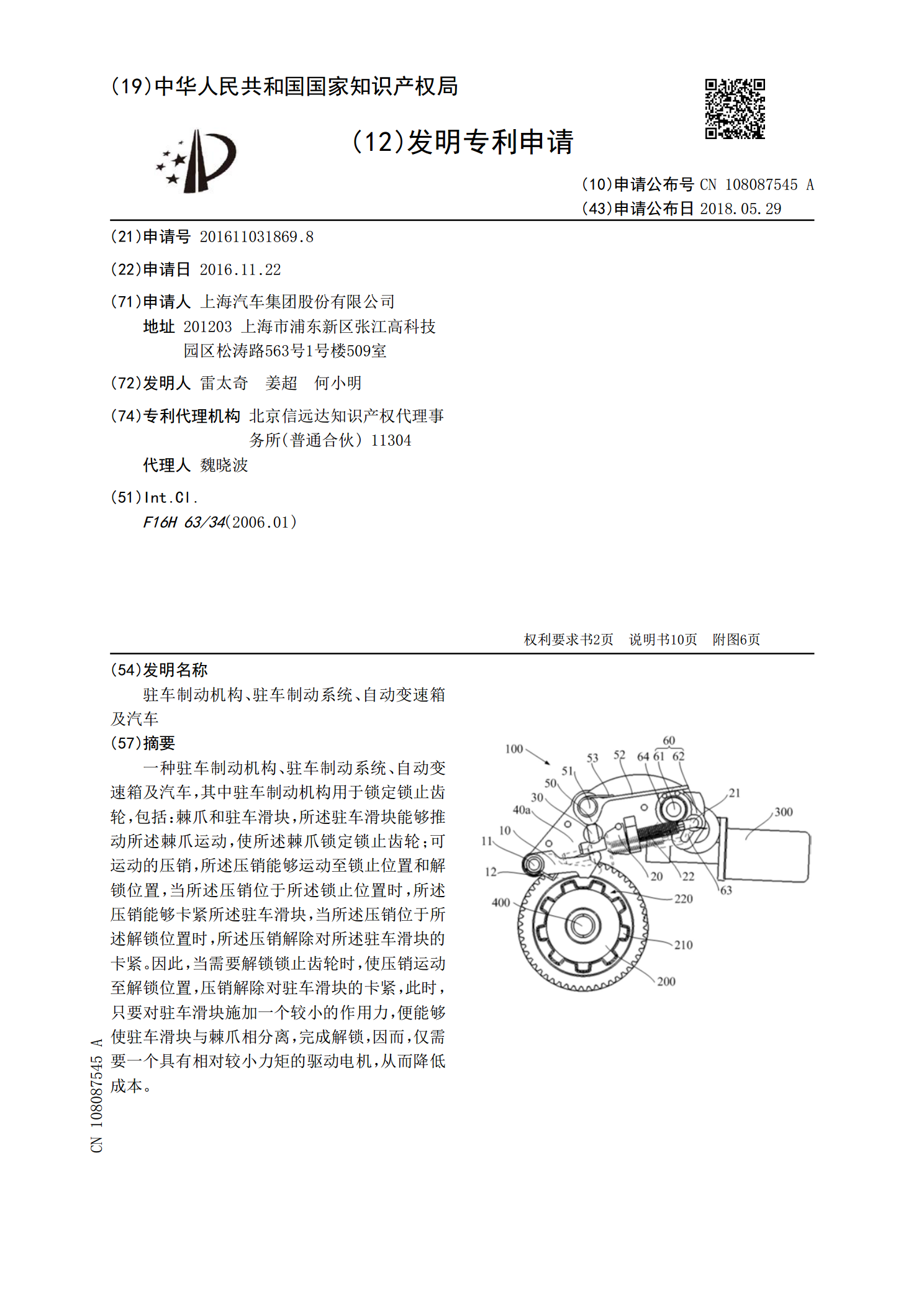
一种驻车制动机构、驻车制动系统、自动变速箱及汽车,其中驻车制动机构用于锁定锁止齿轮,包括:棘爪和驻车滑块,所述驻车滑块能够推动所述棘爪运动,使所述棘爪锁定锁止齿轮;可运动的压销,所述压销能够运动至锁止位置和解锁位置,当所述压销位于所述锁止位置时,所述压销能够卡紧所述驻车滑块,当所述压销位于所述解锁位置时,所述压销解除对所述驻车滑块的卡紧。因此,当需要解锁锁止齿轮时,使压销运动至解锁位置,压销解除对驻车滑块的卡紧,此时,只要对驻车滑块施加一个较小的作用力,便能够使驻车滑块与棘爪相分离,完成解锁,因而,仅需要

现代雅绅特驻车制动系统的调整方法.doc
【摘要】:进行过更换后轮制动摩擦片等相关维修工作后,需要调整摩擦片间隙和驻车制动手柄的行程。明调整方法如下:1.制动摩擦片间隙调整盘式制动:确认驻车制动手柄完全松开,用举升机举起车辆,拆掉后轮并拆下制动盘上的塞子。使用一字型改锥拨动调节牙,直到制动盘无法转动为止,然后向反方向拨动5个齿左右。鼓式制动器:起动发动机,踩几次制动踏板使制动器自动调整间隙。鼓式制动器通过调节器与调节杆自动调整摩擦片间隙。2.驻车制动手柄行程调整举起车辆尾部使后轮处于悬空状态。拆下驻车制动手柄饰板。使用驻车制动手柄拉线调整螺母来调