
上悬移动式自动格栅除污机的研究.docx

书生****萌哒


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

上悬移动式自动格栅除污机的研究.docx
上悬移动式自动格栅除污机的研究摘要对上悬移动式自动格栅除污机的组成、机理及结构特性进行研究,解决了格栅除污机在运动过程中的定位、液压系统输油管线动静结合及清渣齿耙的结构形式等关键技术问题,完成了上悬移动式自动格栅除污机的技术研究工作。关键词格栅除污机液压清渣齿耙液压动静密封1前言国内目前使用于水处理工程中的移动式格栅除污机品种较少,能够较好地满足工艺要求,且运行可靠、操作管理方便、维护检修简单、经济耐用的品种则更是少之又少。多年来,国内学者和工程技术人员在引进、消化、吸收国外新型移动格栅除污机技术的基础上
移动式格栅除污机.pdf
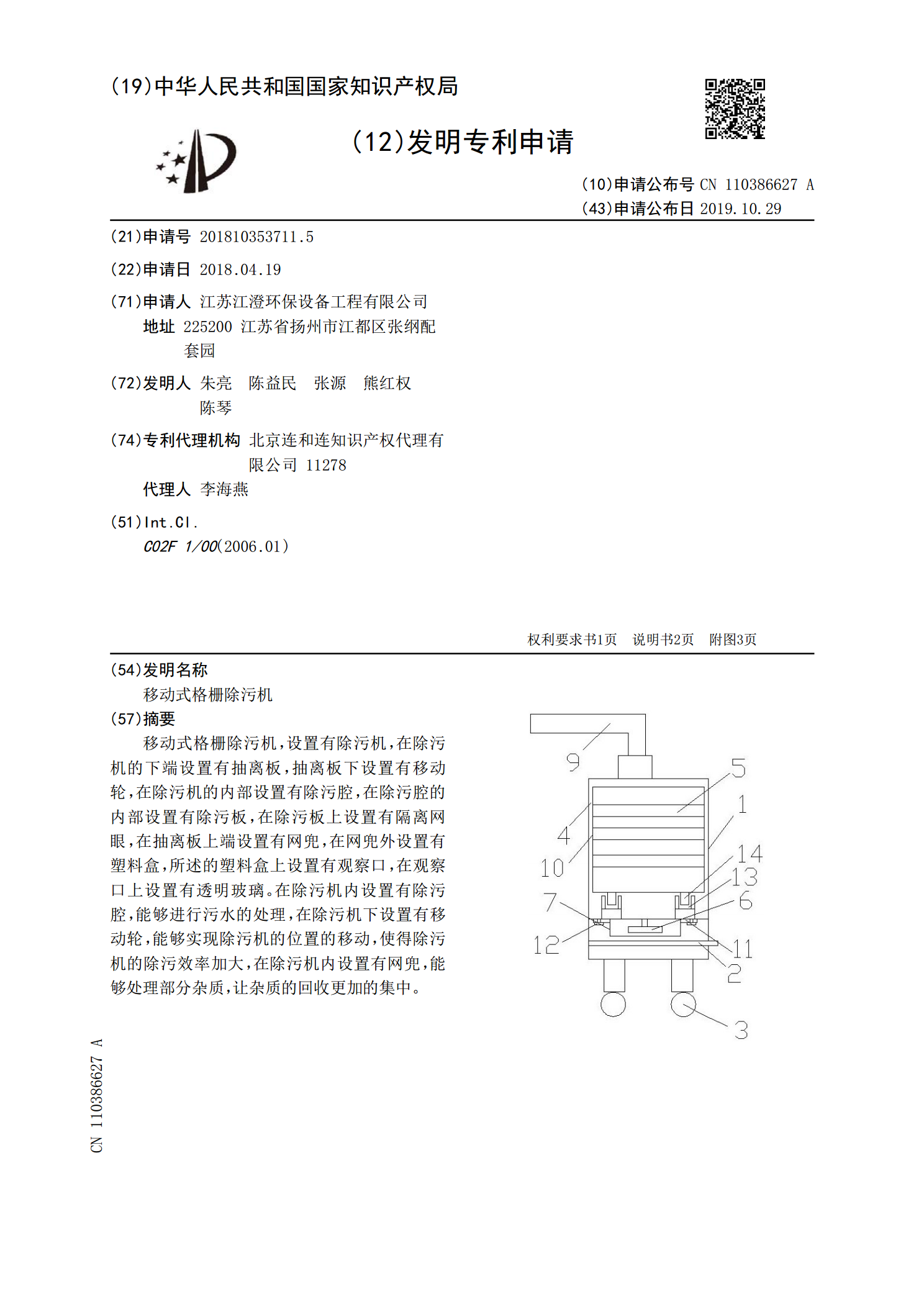
移动式格栅除污机,设置有除污机,在除污机的下端设置有抽离板,抽离板下设置有移动轮,在除污机的内部设置有除污腔,在除污腔的内部设置有除污板,在除污板上设置有隔离网眼,在抽离板上端设置有网兜,在网兜外设置有塑料盒,所述的塑料盒上设置有观察口,在观察口上设置有透明玻璃。在除污机内设置有除污腔,能够进行污水的处理,在除污机下设置有移动轮,能够实现除污机的位置的移动,使得除污机的除污效率加大,在除污机内设置有网兜,能够处理部分杂质,让杂质的回收更加的集中。

人工格栅除污机和机械格栅除污机的区别.docx
格栅除污机是一种可以连续自动拦截并清除流体中各种形状杂物的水处理专用设备,在污水处理前部工序中,拦截、清除各种固体颗粒物、漂浮物等。使后续处理工序得以顺利进行。可广泛地应用于城市污水处理。自来水行业、电厂进水口,同时也可以作为纺织、食品加工、造纸、皮革等行业废水处理工艺中的前级筛分设备,是目前我国先进的固液筛分设备之一。格栅和水流形成35角,因为折流的形成,即使厚度小于格栅缝隙的许多污物也能被分离出来;几乎不需要维修,旋转点上无需加油,驱动装置加油次数极少。格栅装备有冲洗装置,挡耙装置,具有自净功能,圆柱
格栅除污机.pdf
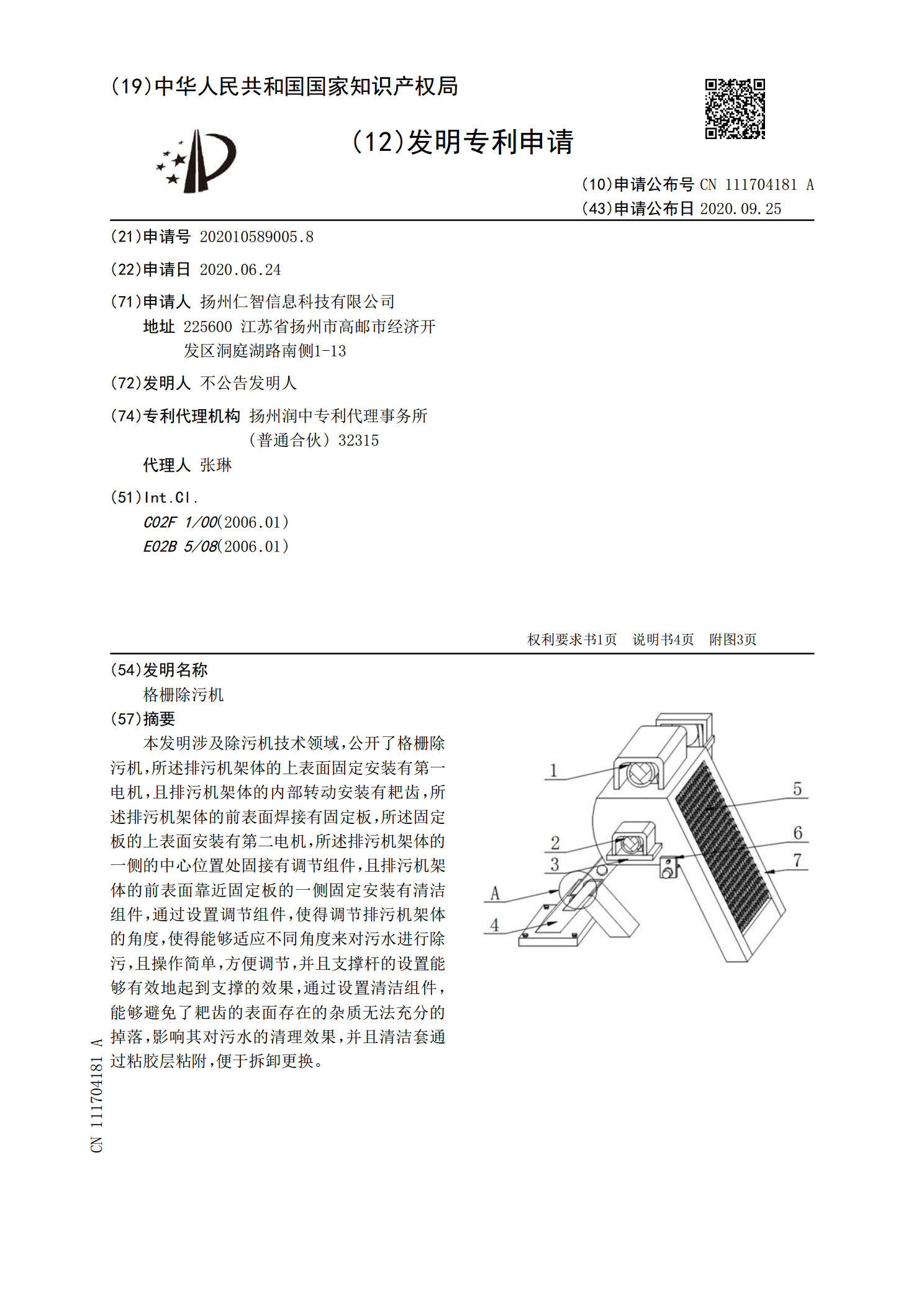
本发明涉及除污机技术领域,公开了格栅除污机,所述排污机架体的上表面固定安装有第一电机,且排污机架体的内部转动安装有耙齿,所述排污机架体的前表面焊接有固定板,所述固定板的上表面安装有第二电机,所述排污机架体的一侧的中心位置处固接有调节组件,且排污机架体的前表面靠近固定板的一侧固定安装有清洁组件,通过设置调节组件,使得调节排污机架体的角度,使得能够适应不同角度来对污水进行除污,且操作简单,方便调节,并且支撑杆的设置能够有效地起到支撑的效果,通过设置清洁组件,能够避免了耙齿的表面存在的杂质无法充分的掉落,影响其
格栅除污机.pdf
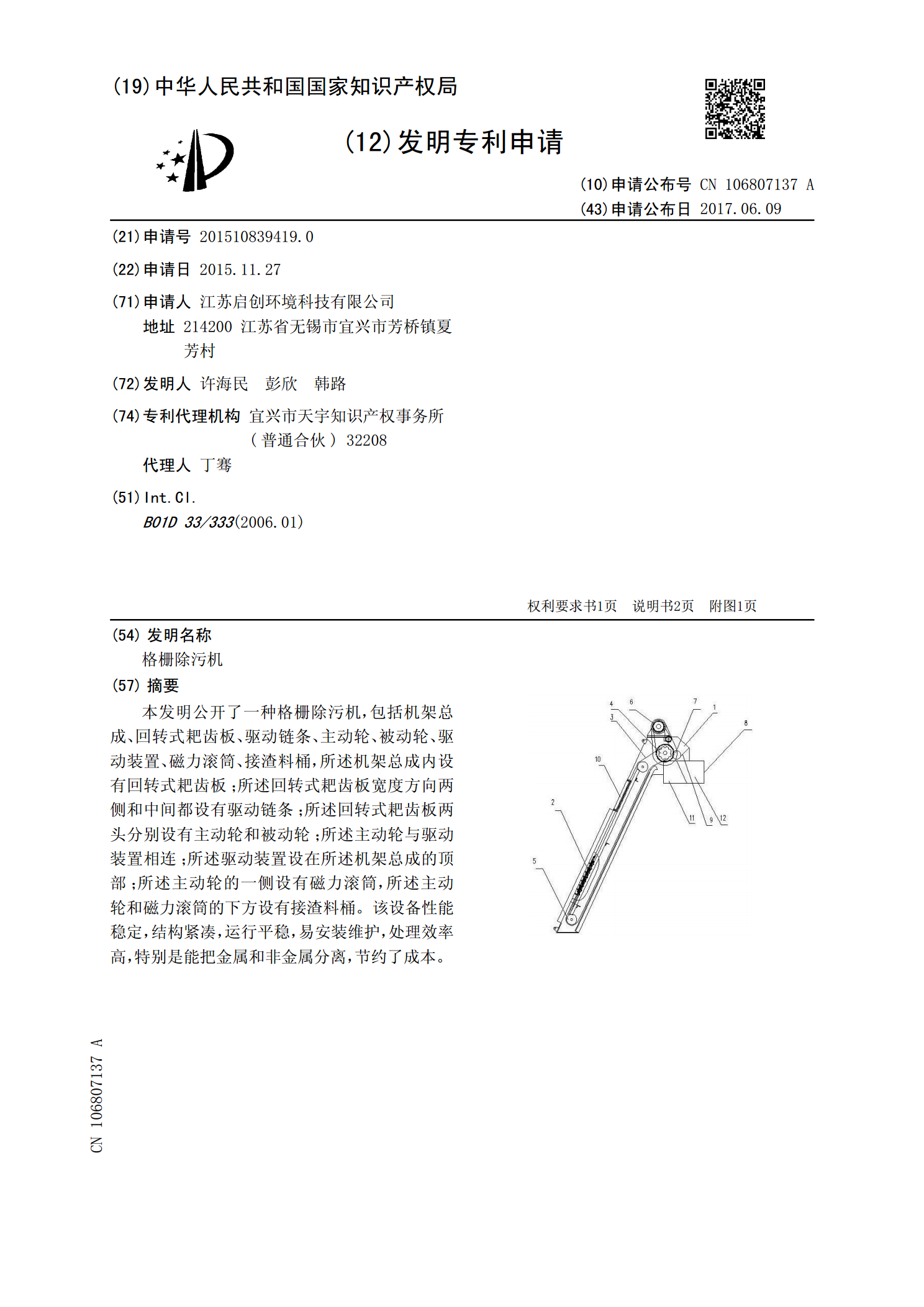
本发明公开了一种格栅除污机,包括机架总成、回转式耙齿板、驱动链条、主动轮、被动轮、驱动装置、磁力滚筒、接渣料桶,所述机架总成内设有回转式耙齿板;所述回转式耙齿板宽度方向两侧和中间都设有驱动链条;所述回转式耙齿板两头分别设有主动轮和被动轮;所述主动轮与驱动装置相连;所述驱动装置设在所述机架总成的顶部;所述主动轮的一侧设有磁力滚筒,所述主动轮和磁力滚筒的下方设有接渣料桶。该设备性能稳定,结构紧凑,运行平稳,易安装维护,处理效率高,特别是能把金属和非金属分离,节约了成本。