
蜗杆蜗轮习题.pdf

文库****品店

1/5

2/5

3/5
4/5
5/5
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
蜗杆蜗轮习题.pdf
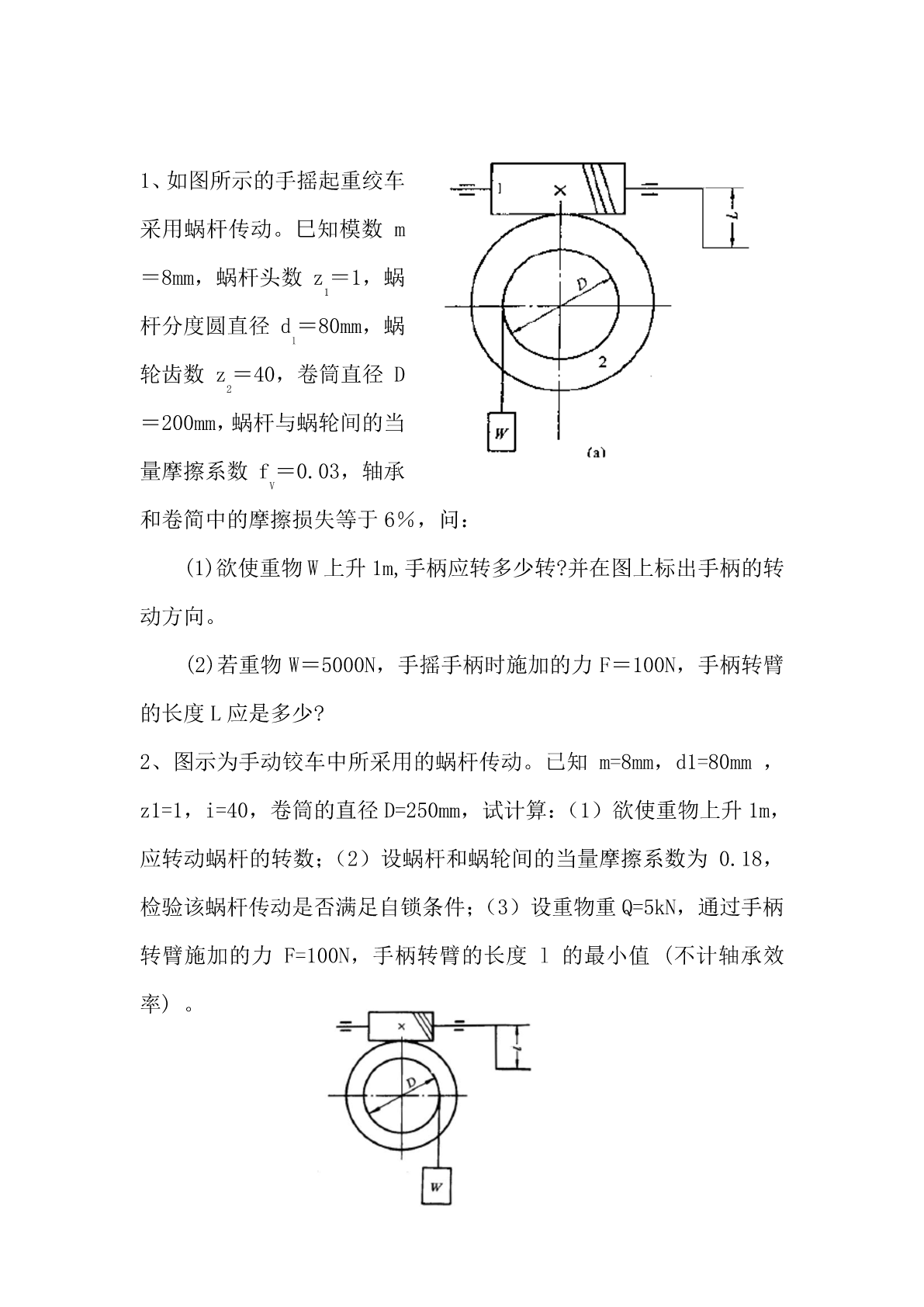
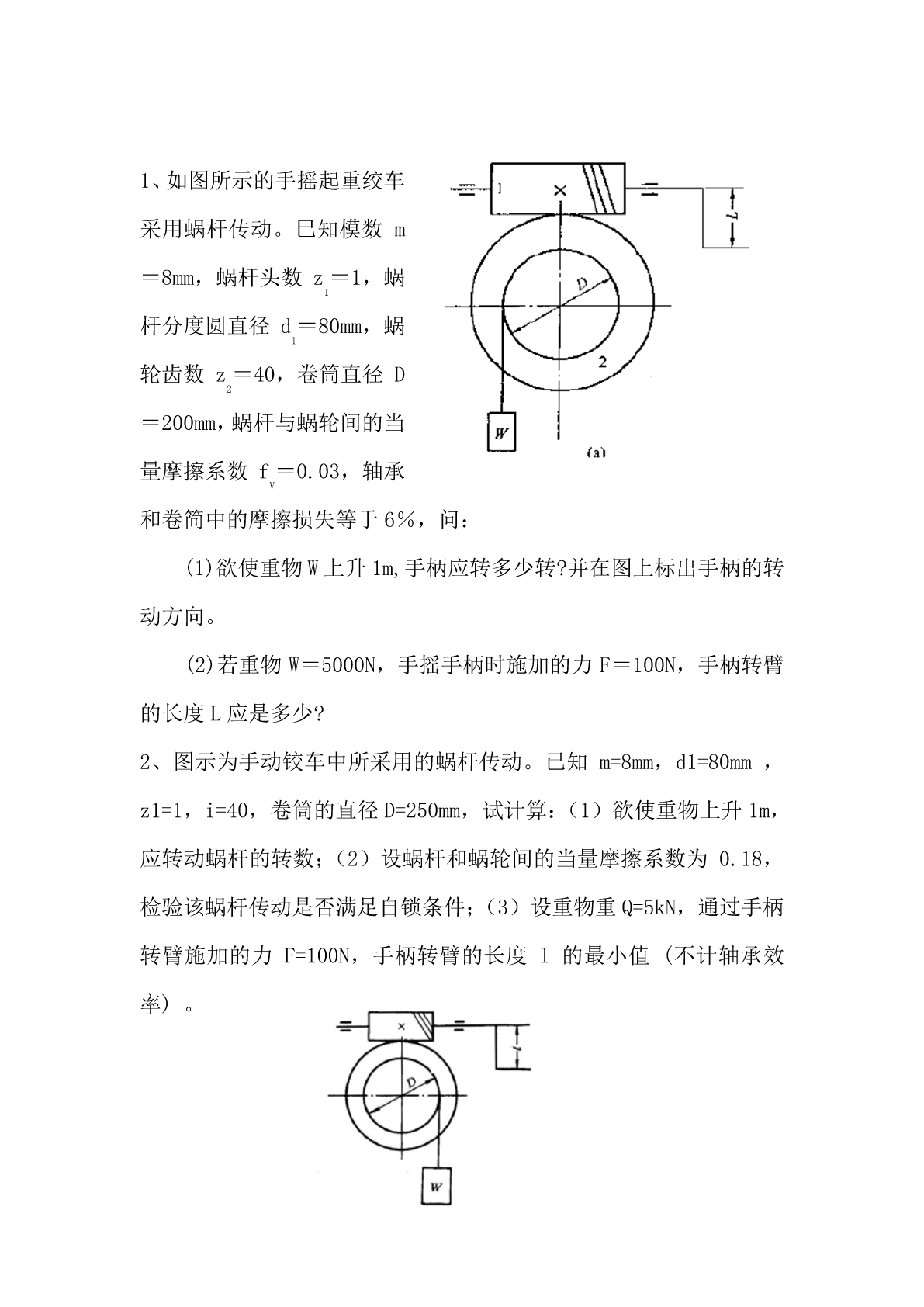
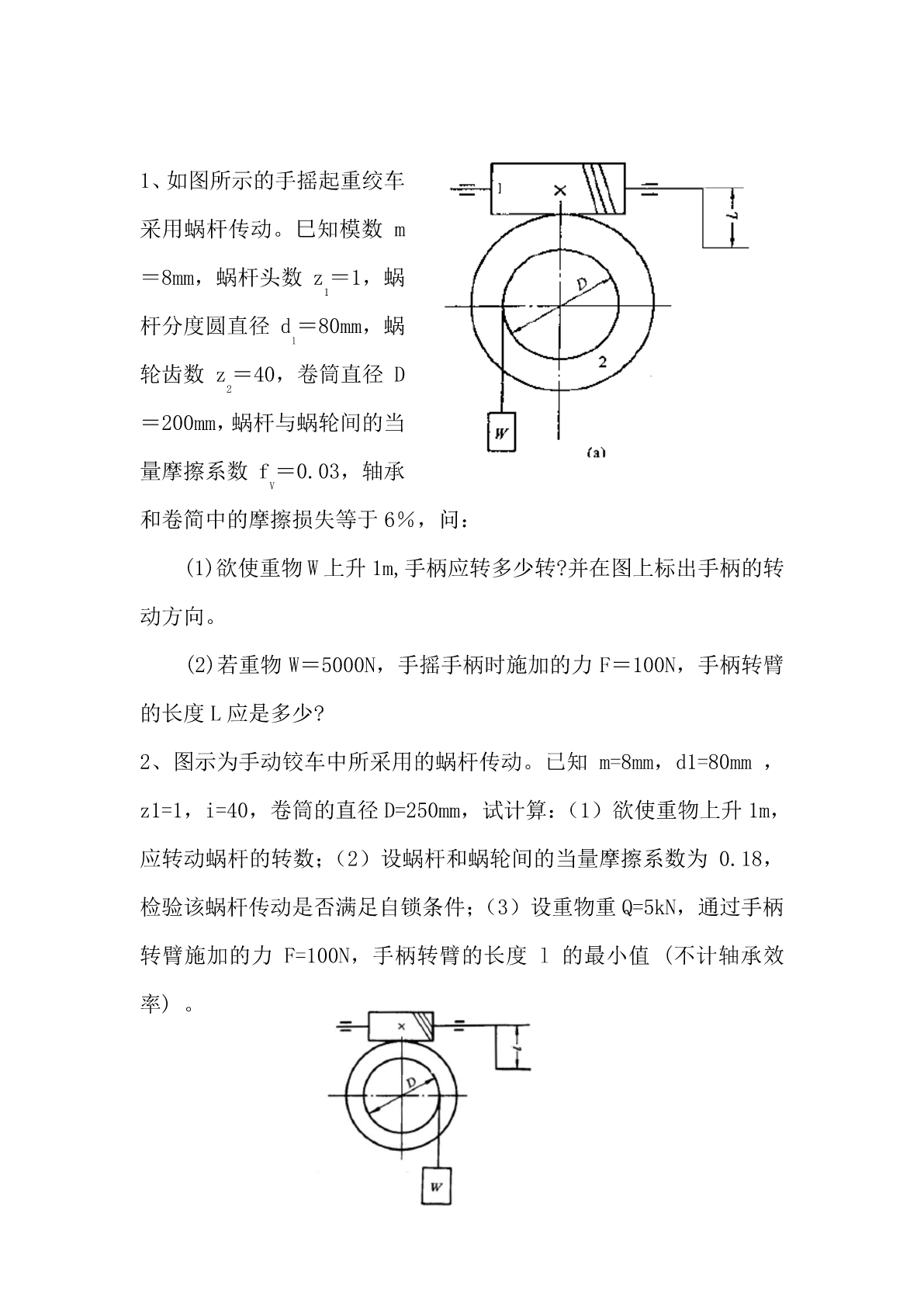
1、如图所示的手摇起重绞车采用蜗杆传动。巳知模数m=8mm,蜗杆头数z=1,蜗1杆分度圆直径d=80mm,蜗1轮齿数z=40,卷筒直径D2=200mm,蜗杆与蜗轮间的当量摩擦系数f=0.03,轴承V和卷简中的摩擦损失等于6%,问:(1)欲使重物W上升1m,手柄应转多少转?并在图上标出手柄的转动方向。(2)若重物W=5000N,手摇手柄时施加的力F=100N,手柄转臂的长度L应是多少?2、图示为手动铰车中所采用的蜗杆传动。已知m=8mm,d1=80mm,z1=1,i=40,卷筒的直径D=250mm,试计算:

蜗杆蜗轮习题.doc
1、如图所示的手摇起重绞车采用蜗杆传动。巳知模数m=8mm,蜗杆头数z1=1,蜗杆分度圆直径d1=80mm,蜗轮齿数z2=40,卷筒直径D=200mm,蜗杆与蜗轮间的当量摩擦系数fV=0.03,轴承和卷简中的摩擦损失等于6%,问:(1)欲使重物W上升1m,手柄应转多少转?并在图上标出手柄的转动方向。(2)若重物W=5000N,手摇手柄时施加的力F=100N,手柄转臂的长度L应是多少?2、图示为手动铰车中所采用的蜗杆传动。已知m=8mm,d1=80mm,z1=1,i=40,卷筒的直径D=250
蜗杆蜗轮习题.pdf
1、如图所示的手摇起重绞车采用蜗杆传动。巳知模数m=8mm,蜗杆头数z=1,蜗1杆分度圆直径d=80mm,蜗1轮齿数z=40,卷筒直径D2=200mm,蜗杆与蜗轮间的当量摩擦系数f=0.03,轴承V和卷简中的摩擦损失等于6%,问:(1)欲使重物W上升1m,手柄应转多少转?并在图上标出手柄的转动方向。(2)若重物W=5000N,手摇手柄时施加的力F=100N,手柄转臂的长度L应是多少?2、图示为手动铰车中所采用的蜗杆传动。已知m=8mm,d1=80mm,z1=1,i=40,卷筒的直径D=250mm,试计算:

蜗轮蜗杆.pdf
蜗轮蜗杆包括:蜗杆,形成有贯穿孔,该贯穿孔被内插传动电机的旋转的轴;蜗轮,与蜗杆啮合、将旋转传动到输出轴。在将法向齿距记为E、凹部的沿蜗杆轴方向的宽度记为H时,蜗杆被构成使得满足式(1)H/E≥0.6。
蜗轮蜗杆传动结构及蜗轮蜗杆减速机.pdf
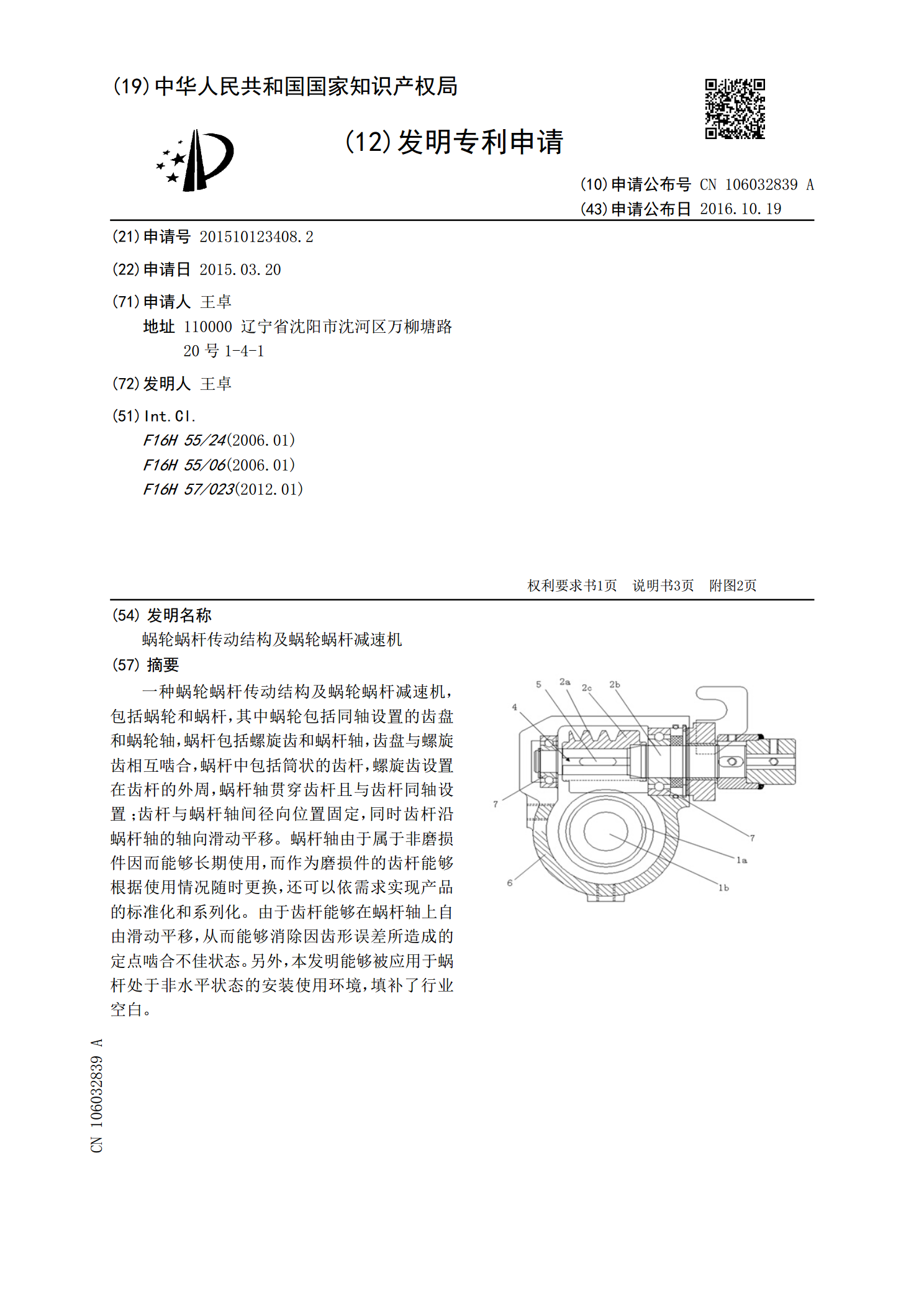
一种蜗轮蜗杆传动结构及蜗轮蜗杆减速机,包括蜗轮和蜗杆,其中蜗轮包括同轴设置的齿盘和蜗轮轴,蜗杆包括螺旋齿和蜗杆轴,齿盘与螺旋齿相互啮合,蜗杆中包括筒状的齿杆,螺旋齿设置在齿杆的外周,蜗杆轴贯穿齿杆且与齿杆同轴设置;齿杆与蜗杆轴间径向位置固定,同时齿杆沿蜗杆轴的轴向滑动平移。蜗杆轴由于属于非磨损件因而能够长期使用,而作为磨损件的齿杆能够根据使用情况随时更换,还可以依需求实现产品的标准化和系列化。由于齿杆能够在蜗杆轴上自由滑动平移,从而能够消除因齿形误差所造成的定点啮合不佳状态。另外,本发明能够被应用于蜗杆处