
数字PID控制算法.pdf

文库****品店


1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

数字PID控制算法.pptx
会计学概述概述概述模拟PID调节器1.比例调节器2.比例积分调节器3.比例微分调节器4.比例积分微分调节器控制规律:(2)比例积分调节器(3)比例微分调节器(4)比例积分微分调节器数字PID控制器三种标准的数字PID控制算法(2)数字PID增量型控制算法数字PID控制(3)两种标准PID控制算法比较增量式PID控制算法的优点数字PID控制算法数字PID控制算法位置型PID算式的递推算式位置型PID控制算式递推算法流程图离散PID控制算法的优缺点优点:控制器参数之间没有关联,离散PID的P、I、D三个作用是

数字PID控制算法.pdf
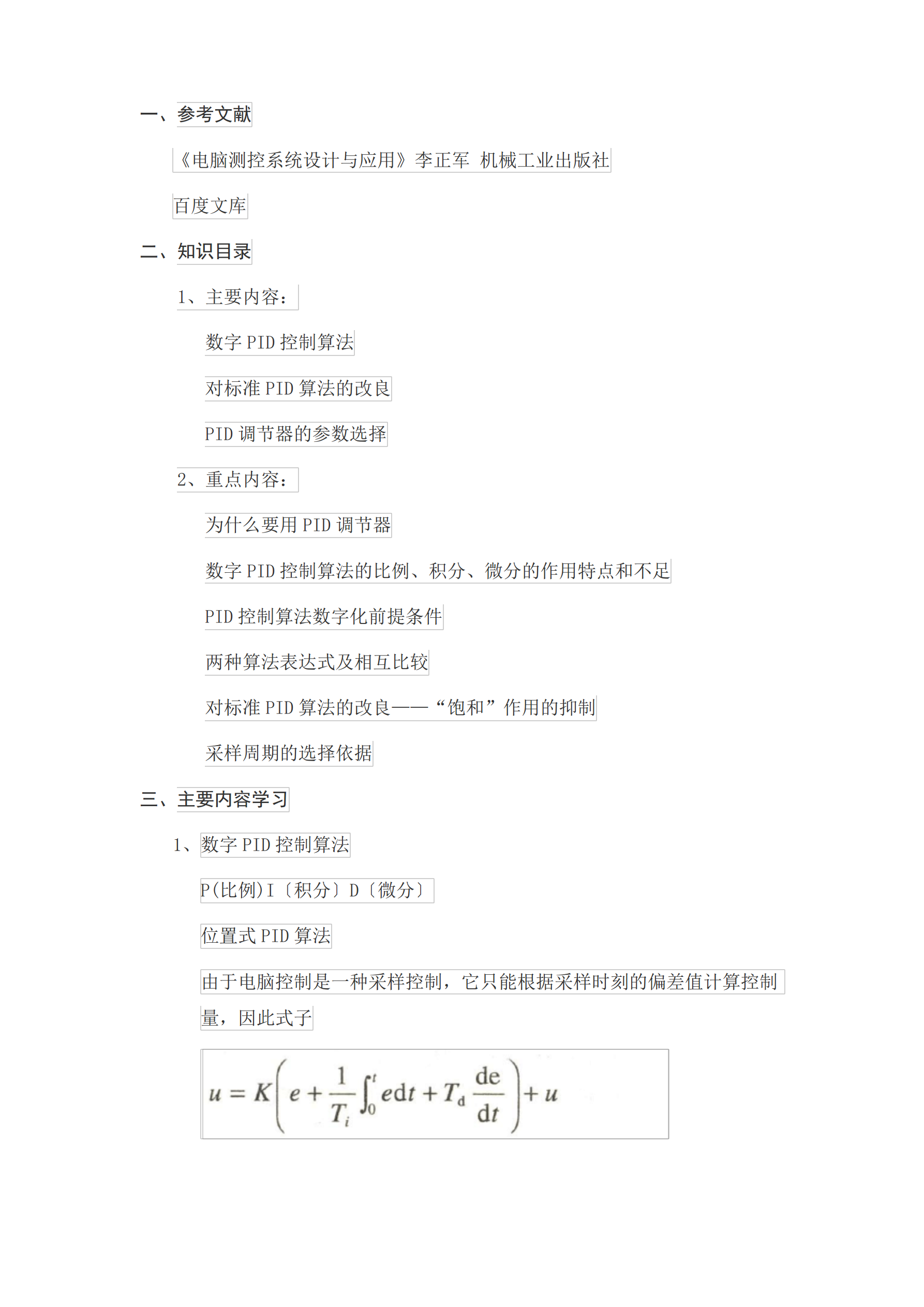
电脑测控系统读书笔记《数字PID控制算法》学院:11111专业:11111姓名:11111学号:111112017年10月一、参考文献《电脑测控系统设计与应用》李正军机械工业出版社百度文库二、知识目录1、主要内容:数字PID控制算法对标准PID算法的改良PID调节器的参数选择2、重点内容:为什么要用PID调节器数字PID控制算法的比例、积分、微分的作用特点和不足PID控制算法数字化前提条件两种算法表达式及相互比较对标准PID算法的改良——“饱和”作用的抑制采样周期的选择依据三、主要内容学习1、数字PID控

数字PID控制算法.ppt
123456789101112131415161718192021222324252627282930313233

数字PID控制算法(11).pptx
第五章数字PID控制算法之一内容提要概述概述(3)准连续PID控制算法(2)准连续PID控制算法(4)准连续PID控制算法(6)准连续PID控制算法(8)准连续PID控制算法(10)准连续PID控制算法(12)概述(2)准连续PID控制算法准连续PID控制算法(3)准连续PID控制算法(5)准连续PID控制算法(7)准连续PID控制算法(9)准连续PID控制算法(11)?对标准PID算法的改进

数字PID控制算法(1).pptx
第五章数字PID控制算法之三内容提要PID调节器参数选择PID调节器参数选择(2)PID调节器参数选择(4)PID调节器参数选择(5-2)PID调节器参数选择(6)PID调节器参数选择(8)阶跃曲线法确定的连续调节器(10-1)PID调节器参数选择(11)PID调节器参数选择(13)PID调节器参数选择(14)应用事例应用事例应用事例控制器闭环特征值PID调节器参数选择(3)PID调节器参数选择(5)PID调节器参数选择(5)PID调节器参数选择(7)PID调节器参数选择(9)PID调节器参数选择(10-