
(完整word版)系统全参数辨识 matlab 实现.pdf

文库****品店

1/8
2/8

3/8
4/8

5/8
6/8
7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
(完整word版)系统全参数辨识 matlab 实现.pdf
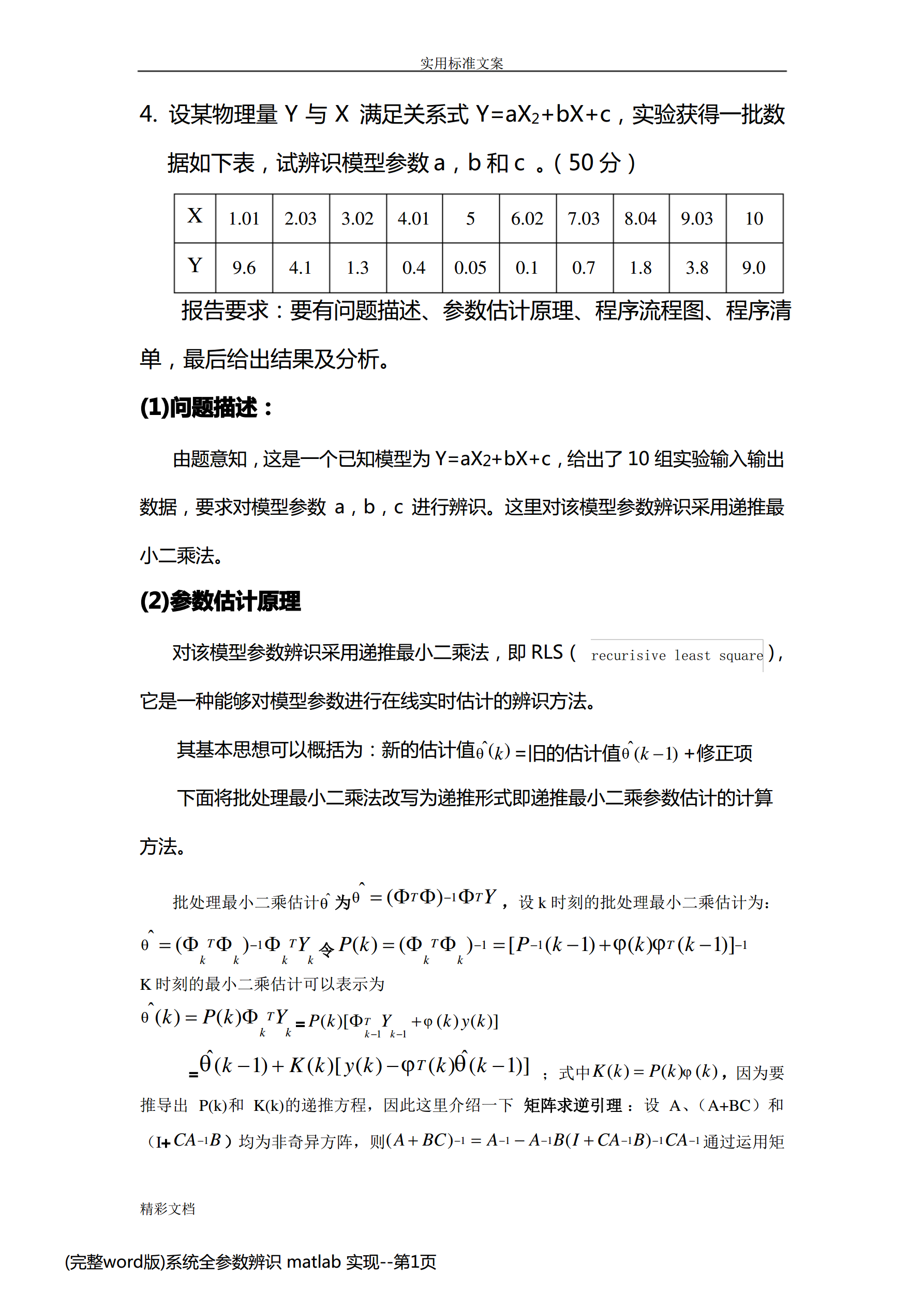
(完整word版)系统全参数辨识matlab实现--实用标准文案4.设某物理量Y与X满足关系式Y=aX2+bX+c,实验获得一批数据如下表,试辨识模型参数a,b和c。(50分)X1.012.033.024.0156.027.038.049.0310Y9.64.11.30.40.050.10.71.83.89.0报告要求:要有问题描述、参数估计原理、程序流程图、程序清单,最后给出结果及分析。(1)问题描述:由题意知,这是一个已知模型为Y=aX2+bX+c,给出了10组实验输入输出数据,要求对模型参数a,b,
(完整word版)系统全参数辨识 matlab 实现.pdf
(完整word版)系统全参数辨识matlab实现--实用标准文案4.设某物理量Y与X满足关系式Y=aX2+bX+c,实验获得一批数据如下表,试辨识模型参数a,b和c。(50分)X1.012.033.024.0156.027.038.049.0310Y9.64.11.30.40.050.10.71.83.89.0报告要求:要有问题描述、参数估计原理、程序流程图、程序清单,最后给出结果及分析。(1)问题描述:由题意知,这是一个已知模型为Y=aX2+bX+c,给出了10组实验输入输出数据,要求对模型参数a,b,

(完整word版)系统全参数辨识-matlab-实现.doc
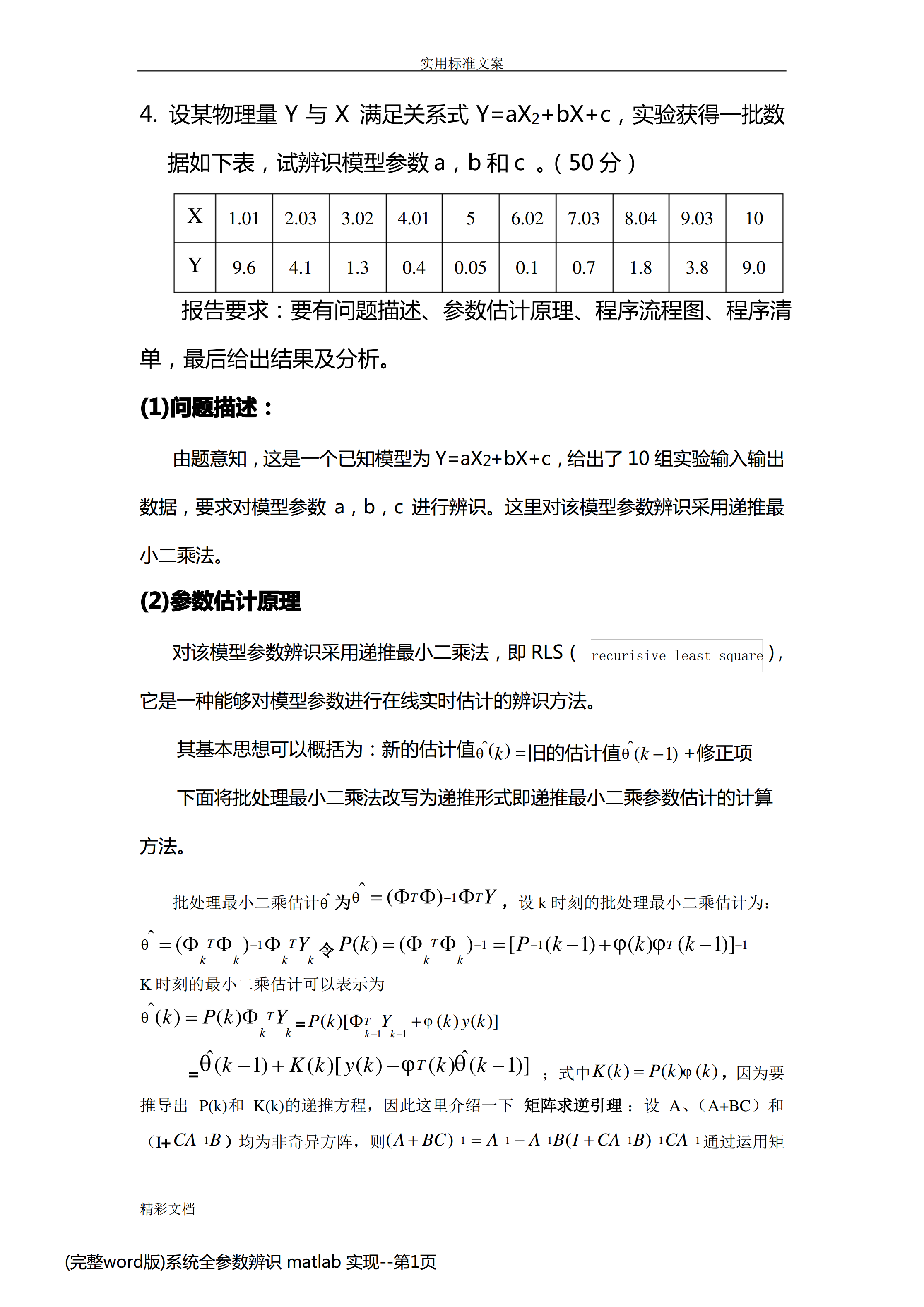
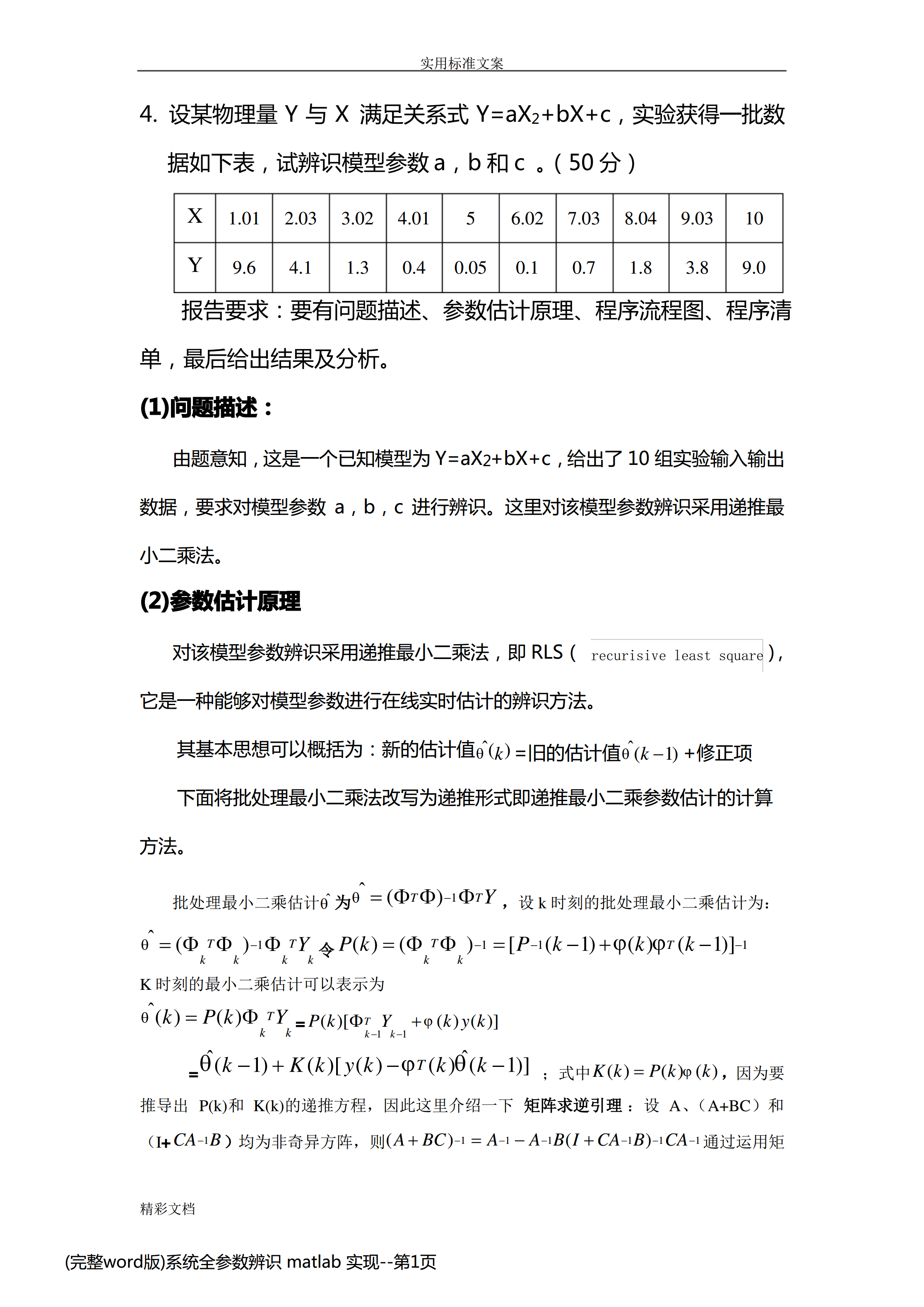
实用标准文案精彩文档4.设某物理量Y与X满足关系式Y=aX2+bX+c,实验获得一批数据如下表,试辨识模型参数a,b和c。(50分)X1.012.033.024.0156.027.038.049.0310Y9.64.11.30.40.050.10.71.83.89.0报告要求:要有问题描述、参数估计原理、程序流程图、程序清单,最后给出结果及分析。问题描述:由题意知,这是一个已知模型为Y=aX2+bX+c,给出了10组实验输入输出数据,要求对模型参数a,b,c进行辨识。这里对该模型参数辨识采用递推最小二乘法

(完整word版)系统全参数辨识-matlab-实现.doc
实用标准文案精彩文档4.设某物理量Y与X满足关系式Y=aX2+bX+c,实验获得一批数据如下表,试辨识模型参数a,b和c。(50分)X1.012.033.024.0156.027.038.049.0310Y9.64.11.30.40.050.10.71.83.89.0报告要求:要有问题描述、参数估计原理、程序流程图、程序清单,最后给出结果及分析。问题描述:由题意知,这是一个已知模型为Y=aX2+bX+c,给出了10组实验输入输出数据,要求对模型参数a,b,c进行辨识。这里对该模型参数辨识采用递推最小二乘法

系统全参数辨识matlab实现.doc
实用标准文案精彩文档4.设某物理量Y与X满足关系式Y=aX2+bX+c,实验获得一批数据如下表,试辨识模型参数a,b和c。(50分)X1.012.033.024.0156.027.038.049.0310Y9.64.11.30.40.050.10.71.83.89.0报告要求:要有问题描述、参数估计原理、程序流程图、程序清单,最后给出结果及分析。问题描述:由题意知,这是一个已知模型为Y=aX2+bX+c,给出了10组实验输入输出数据,要求对模型参数a,b,c进行辨识。这里对该模型参数辨识采用递推最小二乘法