
轮腿式爬梯机器人设计.doc

Jo****31


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

轮腿式爬梯机器人设计.doc
轮腿式爬梯机器人设计小组成员:摘要:本设计涉及一种爬楼梯机械装置,包括前机身、后机身、机身连接部件、四个五星形轮腿、四个直流伺服电机和轮腿固定部件,其特点是:前机身和后机身通过机身连接部件连接为一体,四个五星形轮腿分别通过轮腿固定部件固定在前、后机身两侧上,且每个五星形轮腿与固定在机身上的直流伺服电机传动连接。每个五星形轮腿包括五个车轮杆,车轮杆之间的夹角相等且外伸长度可以调整,五星形轮腿转过一周,能够实现攀爬五个台阶的楼梯。本发明爬楼梯的效率高,同时能够较好的适应室外不平整地形,可以作为灾后搜救、野外搜

轮腿式爬梯机器人设计.doc
轮腿式爬梯机器人设计小组成员:摘要:本设计涉及一种爬楼梯机械装置,包括前机身、后机身、机身连接部件、四个五星形轮腿、四个直流伺服电机和轮腿固定部件,其特点是:前机身和后机身通过机身连接部件连接为一体,四个五星形轮腿分别通过轮腿固定部件固定在前、后机身两侧上,且每个五星形轮腿与固定在机身上的直流伺服电机传动连接。每个五星形轮腿包括五个车轮杆,车轮杆之间的夹角相等且外伸长度可以调整,五星形轮腿转过一周,能够实现攀爬五个台阶的楼梯。本发明爬楼梯的效率高,同时能够较好的适应室外不平整地形,可以作为灾后搜救、野外搜
轮腿式爬梯机器人设计.doc
轮腿式爬梯机器人设计小组成员:摘要:本设计涉及一种爬楼梯机械装置,包括前机身、后机身、机身连接部件、四个五星形轮腿、四个直流伺服电机和轮腿固定部件,其特点是:前机身和后机身通过机身连接部件连接为一体,四个五星形轮腿分别通过轮腿固定部件固定在前、后机身两侧上,且每个五星形轮腿与固定在机身上的直流伺服电机传动连接。每个五星形轮腿包括五个车轮杆,车轮杆之间的夹角相等且外伸长度可以调整,五星形轮腿转过一周,能够实现攀爬五个台阶的楼梯。本发明爬楼梯的效率高,同时能够较好的适应室外不平整地形,可以作为灾后搜救、野外搜

轮腿式越障机器人.pdf
本发明提供了一种轮腿式越障机器人,属于移动机器人领域,其包括相连接的机架和轮腿机构;轮腿机构包括机架关节、机械臂转向装置、机械臂、轮体转向装置和轮体装置;机械臂转向装置与机架关节转动连接,机械臂一端与机械臂转向装置连接,另一端连接轮体转向装置,轮体装置与轮体转向装置转动连接,机械臂包括伸缩驱动装置以及能够折叠变形的四边形机构,伸缩驱动装置的固定端和伸缩端分别连接四边形机构的对角线的两端。利用机械臂转向装置能够驱动机械臂水平转动,利用轮体转向装置能够驱动轮体装置水平转动,机械臂通过其自身的伸缩驱动装置实现沿
轮腿行进式机器人.pdf
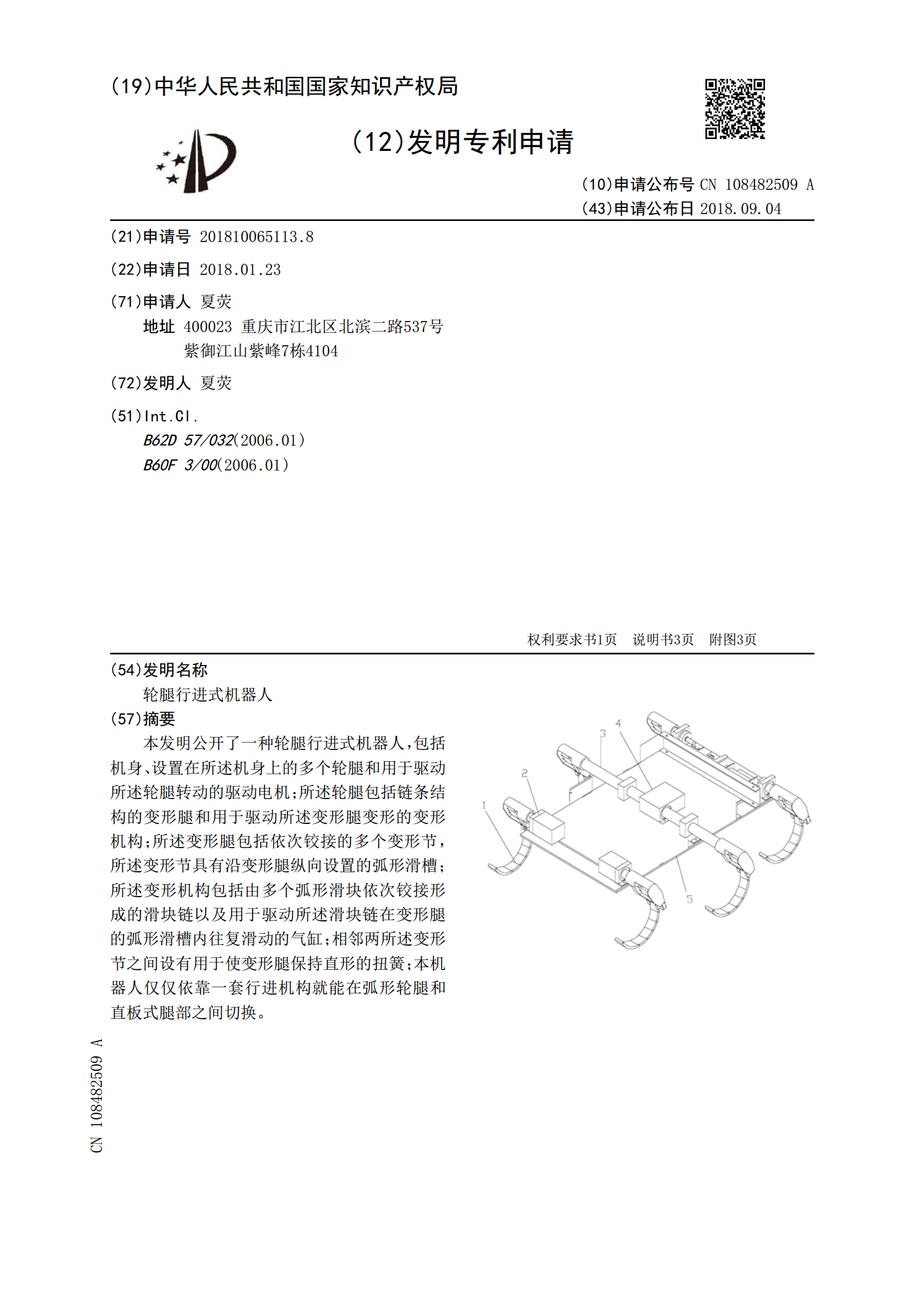
本发明公开了一种轮腿行进式机器人,包括机身、设置在所述机身上的多个轮腿和用于驱动所述轮腿转动的驱动电机;所述轮腿包括链条结构的变形腿和用于驱动所述变形腿变形的变形机构;所述变形腿包括依次铰接的多个变形节,所述变形节具有沿变形腿纵向设置的弧形滑槽;所述变形机构包括由多个弧形滑块依次铰接形成的滑块链以及用于驱动所述滑块链在变形腿的弧形滑槽内往复滑动的气缸;相邻两所述变形节之间设有用于使变形腿保持直形的扭簧;本机器人仅仅依靠一套行进机构就能在弧形轮腿和直板式腿部之间切换。