
步进电机及其驱动电路.doc

15****47

1/10
2/10
3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共32页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
步进电机及其驱动电路.doc
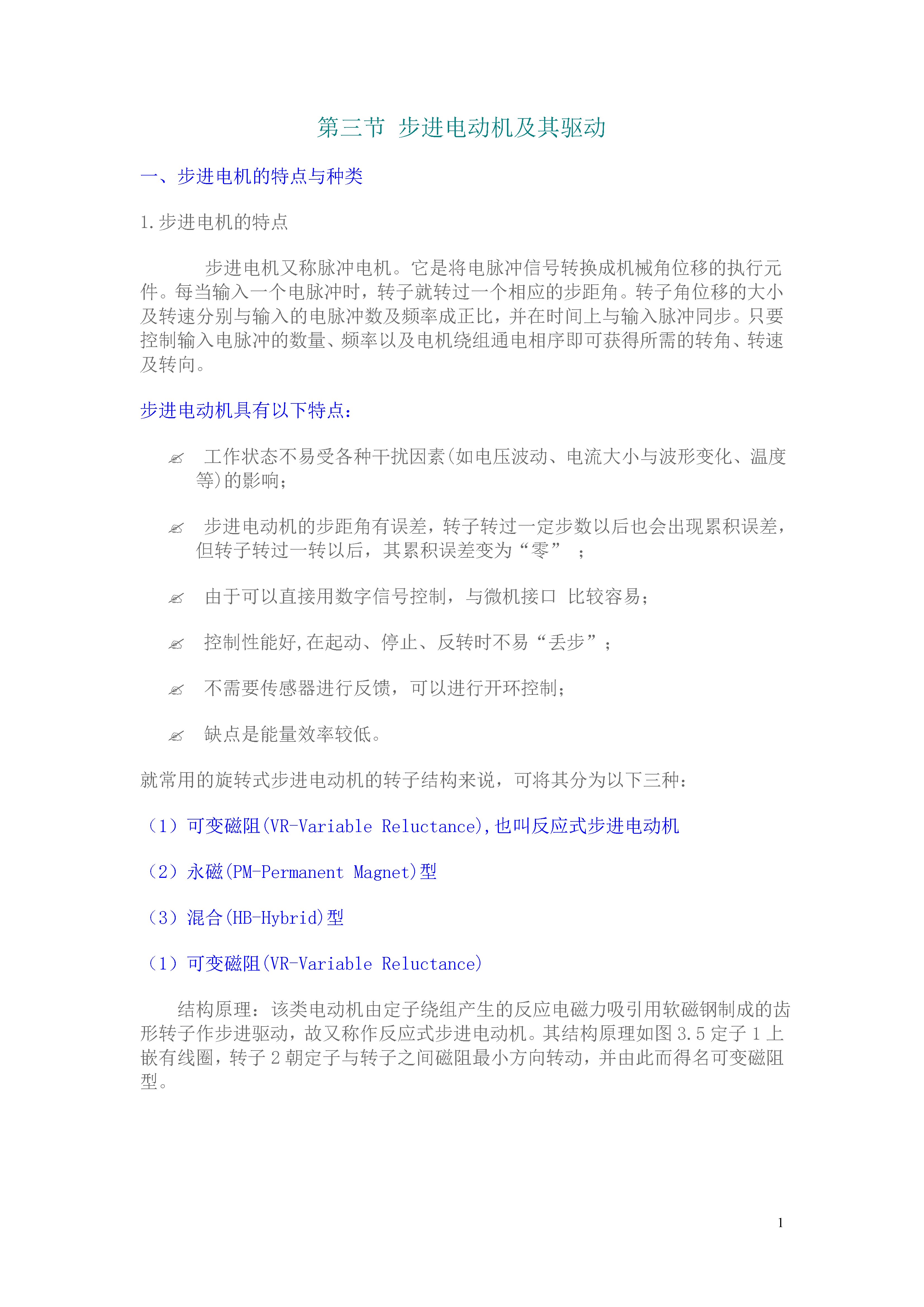
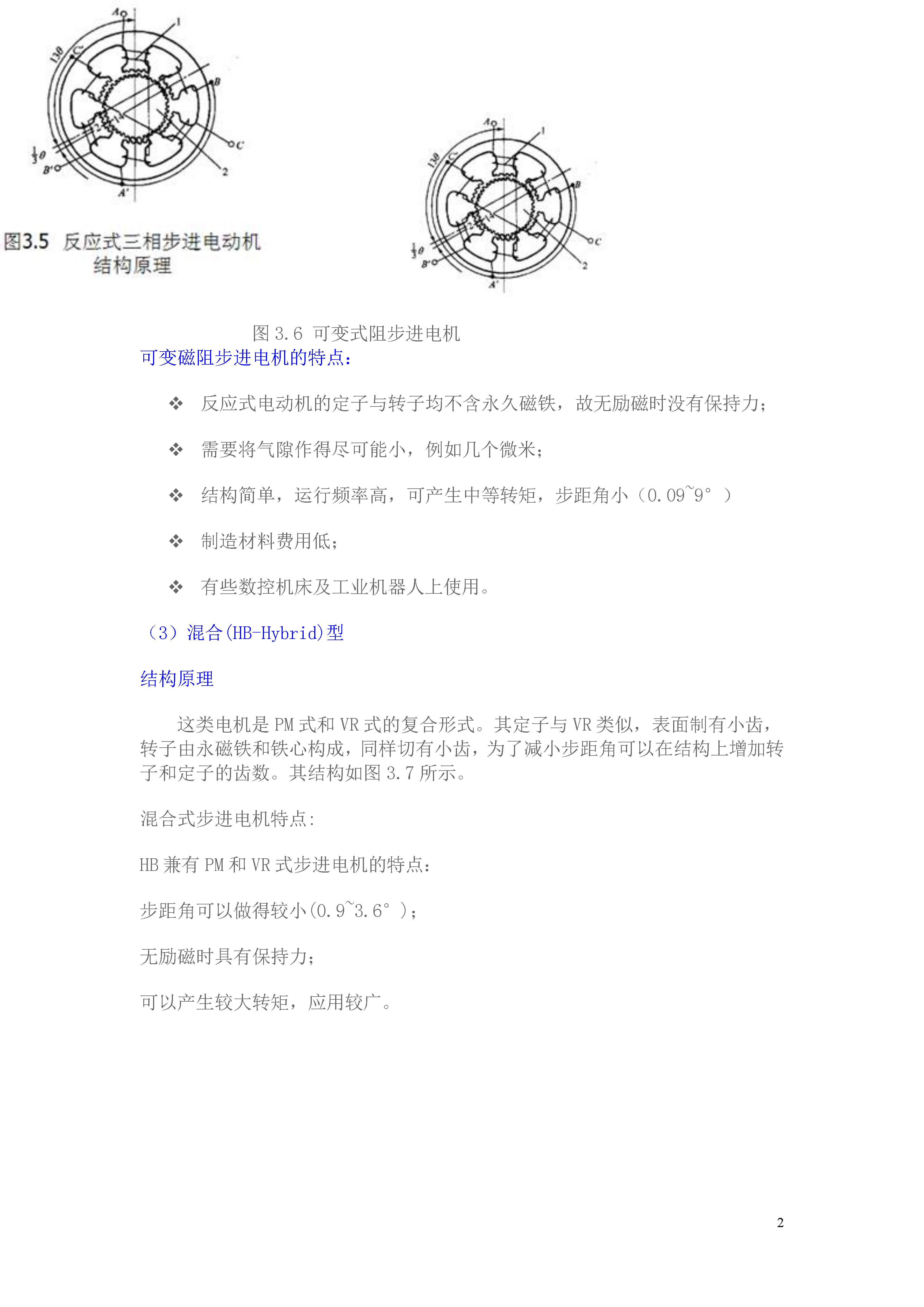
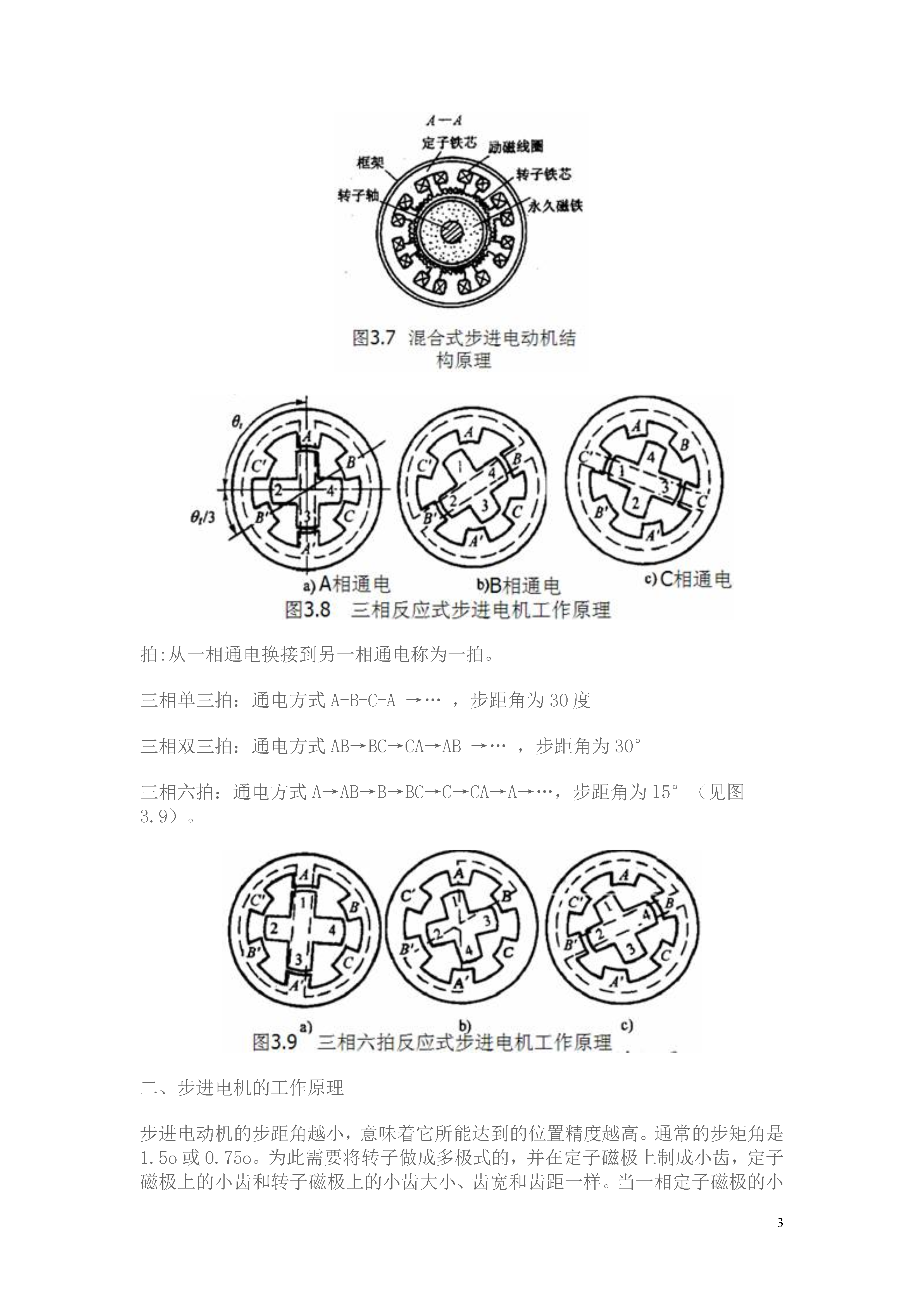
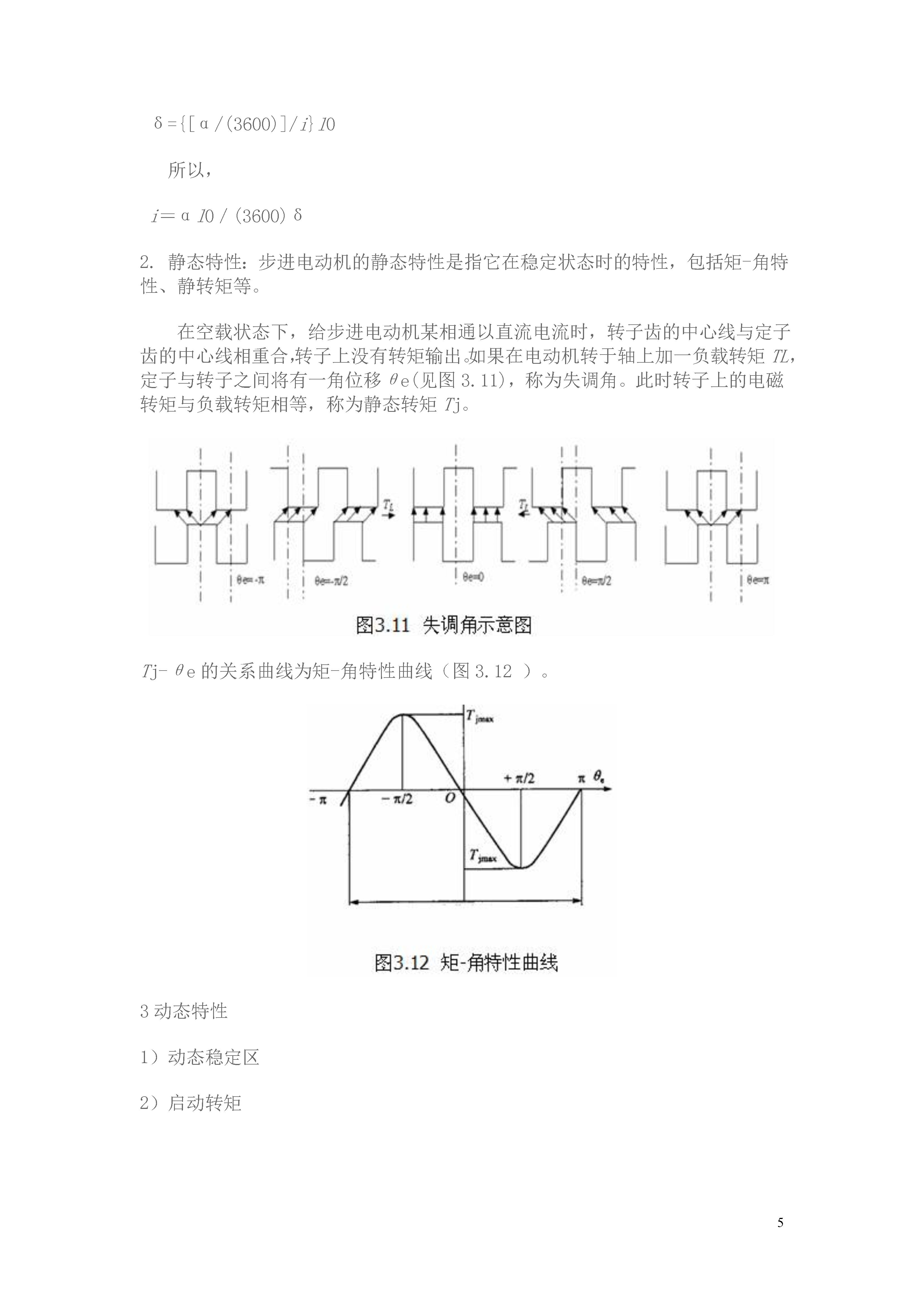
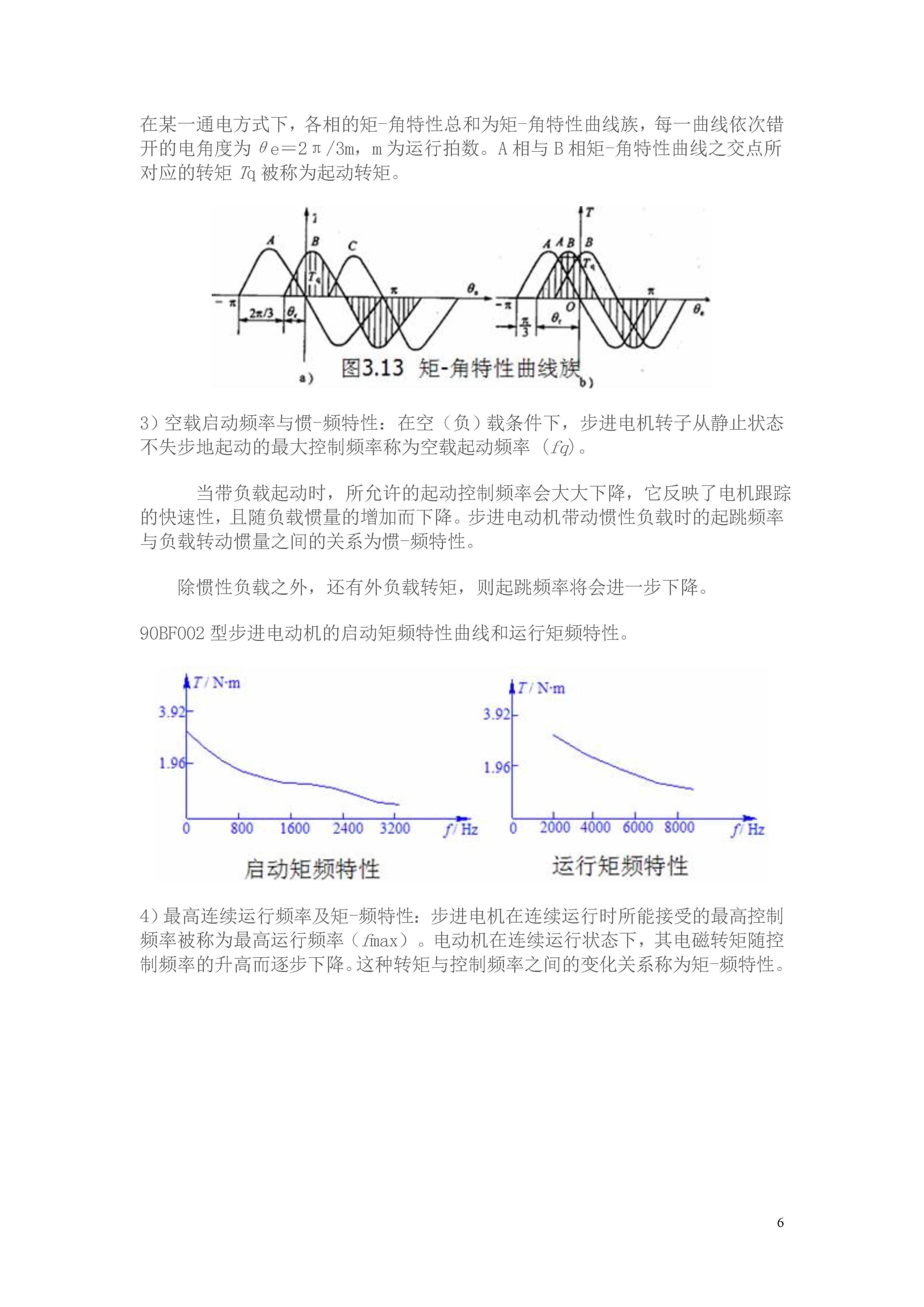
32第三节步进电动机及其驱动一、步进电机的特点与种类1.步进电机的特点步进电机又称脉冲电机。它是将电脉冲信号转换成机械角位移的执行元件。每当输入一个电脉冲时,转子就转过一个相应的步距角。转子角位移的大小及转速分别与输入的电脉冲数及频率成正比,并在时间上与输入脉冲同步。只要控制输入电脉冲的数量、频率以及电机绕组通电相序即可获得所需的转角、转速及转向。步进电动机具有以下特点:工作状态不易受各种干扰因素(如电压波动、电流大小与波形变化、温度等)的影响;步进电动机的步距角有误差,转子转过一定步数以后也会出现累

步进电机及其驱动电路.doc
第三节步进电动机及其驱动一、步进电机的特点与种类1.步进电机的特点步进电机又称脉冲电机。它是将电脉冲信号转换成机械角位移的执行元件。每当输入一个电脉冲时,转子就转过一个相应的步距角。转子角位移的大小及转速分别与输入的电脉冲数及频率成正比,并在时间上与输入脉冲同步。只要控制输入电脉冲的数量、频率以及电机绕组通电相序即可获得所需的转角、转速及转向。步进电动机具有以下特点:工作状态不易受各种干扰因素(如电压波动、电流大小与波形变化、温度等)的影响;步进电动机的步距角有误差,转

步进电机及其驱动电路.docx
第三节步进电动机及其驱动一、步进电机的特点与种类1.步进电机的特点步进电机又称脉冲电机。它是将电脉冲信号转换成机械角位移的执行元件。每当输入一个电脉冲时,转子就转过一个相应的步距角。转子角位移的大小及转速分别与输入的电脉冲数及频率成正比,并在时间上与输入脉冲同步。只要控制输入电脉冲的数量、频率以及电机绕组通电相序即可获得所需的转角、转速及转向。步进电动机具有以下特点:工作状态不易受各种干扰因素(如电压波动、电流大小与波形变化、温度等)的影响;步进电动机的步距角有误差,转子转过一定步数以后也会出现累积误

步进电机驱动电路.docx
步进电机驱动电路前言:想要写出一篇令人眼前一亮的文章吗?我们特意为您整理了5篇步进电机驱动电路范文,相信会为您的写作带来帮助,发现更多的写作思路和灵感。步进电机驱动电路范文第1篇1PMM8713的功能特点PMM8713是日本三洋电机公司生产的步进电机脉冲分配器。该器件采用DIP16封装,适用于二相或四相步进电机。PMM8713在控制二相或四相步进电机时都可选择三种励磁方式(1相励磁,2相励磁,1-2相励磁三种励磁方式之一),每相最小的拉电流和灌电流为20mA,它不但可满足后级功率放大器的要求,而且在所有输

步进电机驱动电路.docx
步进电机驱动电路[单机片]1.步进电机的工作原理该步进电机为一四相步进电机,采用单极性直流电源供电。只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。图1是该四相反应式步进电机工作原理示意图。图1四相步进电机步进示意图开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,