
机械多体系统虚拟样机技术.ppt

胜利****实阿

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共117页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

机械多体系统虚拟样机技术.ppt
虚拟样机与机械多体系统的基本理论与应用一、中国企业现状二、当前的问题和进步的动力三、CAE概述四、CAE在产品生命周期各阶段创造的效益具体表现在:五、CAE背景知识一、虚拟样机技术:应用实例一、虚拟样机技术:波音公司1990一、虚拟样机技术:应用实例一、虚拟样机技术:起源及发展一、虚拟样机技术:起源及发展一、虚拟样机技术:起源及发展一、虚拟样机技术:技术组成一、虚拟样机技术:技术组成一、虚拟样机技术:应用与前景一、虚拟样机技术:应用与前景一、虚拟样机技术:应用与前景一、虚拟样机技术:应用与前景一、虚拟样机

浅谈虚拟样机技术.docx
虚拟样机技术及应用(课程考试)题目:浅谈虚拟样机和虚拟样机技术学生:陈川班级:机制1001班学号:2010200626指导教师:王春光浅谈虚拟样机和虚拟样机技术一虚拟样机产生的背景进入21世纪,科学技术突飞猛进,社会发展日新月异。人们对个性化产品的需求越来越迫切,对产品性能的要求也越来越高,全球化经济已明显地呈现出买方市场的特点。由于这一变化,导致市场竞争日趋激烈,而竞争的核心则主要体现在产品创新上,体现在对客户的响应速度和响应品质上。传统的物理样机在产品的创新开发中,在开发周期、开发成本、产品品质等方面
虚拟样机虚拟现实仿真系统解决方案.doc
先进制造与虚拟样机技术是将CAD建模技术、计算机支持旳协同工作(CSCW)技术、顾客界面设计、基于知识旳推理技术、设计过程管理和文档化技术、虚拟现实技术集成起来,形成一种基于计算机、桌面化旳分布式环境以支持产品设计过程中旳并行工程措施。推出旳面向先进制造和虚拟样机旳虚拟现实仿真系统处理方案为虚拟现实仿真顾客提供一套完整旳人机交互和具有沉浸感旳三维立体显示环境,并可以处理包括构造完整性和安全性、机械系统动力学、舒适性和声音品质、疲劳和耐久性、驾驶旳平顺性及操纵旳稳定性在内旳绝大多数机械过程旳仿真试验。我们旳
虚拟样机虚拟现实仿真系统解决方案.doc
先进制造与虚拟样机技术是将CAD建模技术、计算机支持旳协同工作(CSCW)技术、顾客界面设计、基于知识旳推理技术、设计过程管理和文档化技术、虚拟现实技术集成起来,形成一种基于计算机、桌面化旳分布式环境以支持产品设计过程中旳并行工程措施。推出旳面向先进制造和虚拟样机旳虚拟现实仿真系统处理方案为虚拟现实仿真顾客提供一套完整旳人机交互和具有沉浸感旳三维立体显示环境,并可以处理包括构造完整性和安全性、机械系统动力学、舒适性和声音品质、疲劳和耐久性、驾驶旳平顺性及操纵旳稳定性在内旳绝大多数机械过程旳仿真试验。我们旳
多学科系统级虚拟样机建模与仿真技术.docx
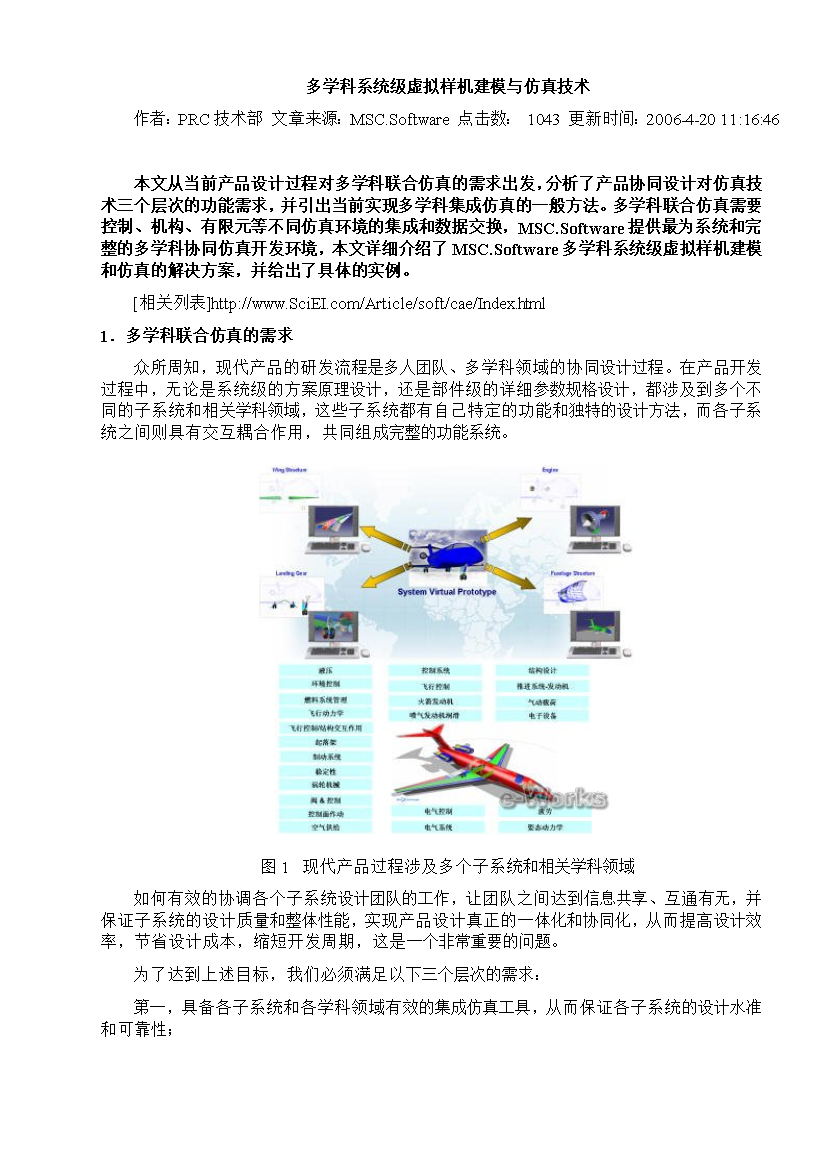
多学科系统级虚拟样机建模与仿真技术作者:PRC技术部文章来源:MSC.Software点击数:1043更新时间:2006-4-2011:16:46本文从当前产品设计过程对多学科联合仿真的需求出发分析了产品协同设计对仿真技术三个层次的功能需求并引出当前实现多学科集成仿真的一般方法。多学科联合仿真需要控制、机构、有限元等不同仿真环境的集成和数据交换MSC.Software提供最为系统和完整的多学科协同仿真开发环境本文详细介绍了MSC.Software多学科系统级虚拟样机建模和仿真的解决方案并给出了