
步进电机型号、参数、选择.ppt

胜利****实阿

1/10
2/10

3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共65页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

步进电机型号、参数、选择.ppt
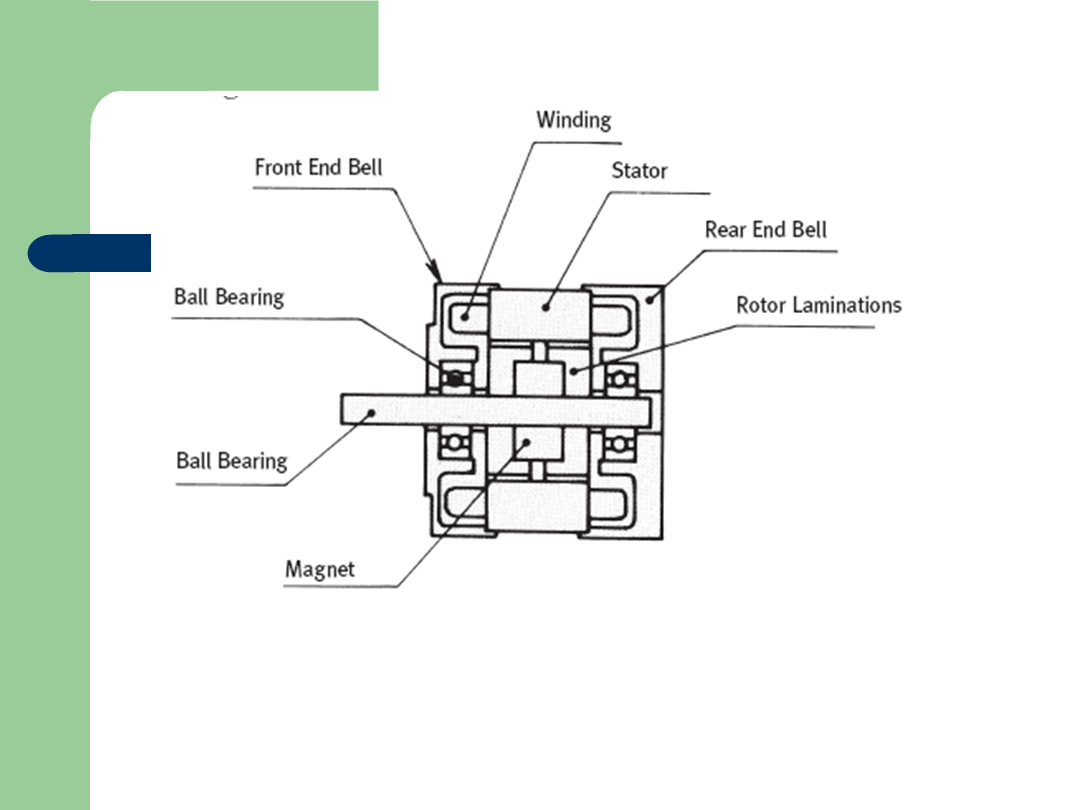
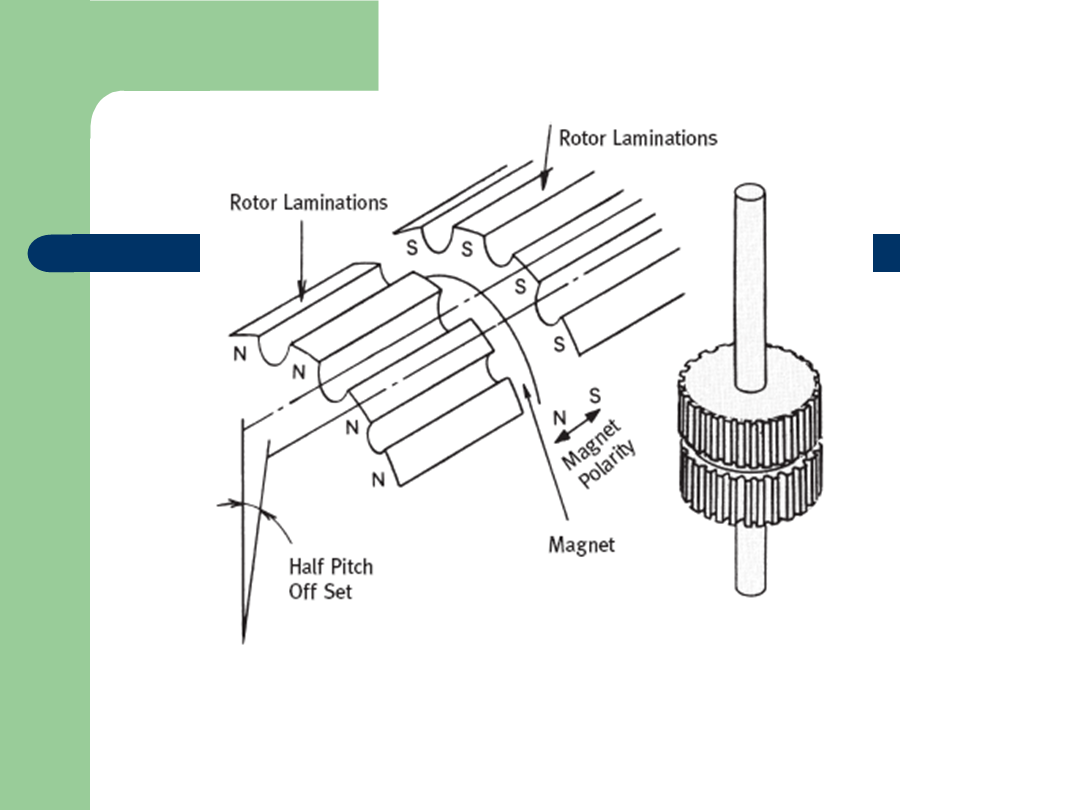
主要内容一、步进电动机简介步进电动机的历史步进电动机的定义步进电动机的工作原理步进电动机的机座号步进电动机构造步进电动机主要参数步进电动机的特点一、步进电动机简介6.步进电动机主要参数步进电机的相数:是指电机内部的线圈组数,目前常用的有两相、三相、五相步进电机。拍数:完成一个磁场周期性变化所需脉冲数或导电状态,用m表示,或指电机转过一个齿距角所需脉冲数。保持转矩:是指步进电机通电但没有转动时,定子锁住转子的力矩。步距角:对应一个脉冲信号,电机转子转过的角位移。定位转矩:电机在不通电状态下,电机转子自身的锁

最新-步进电机的选用及电机型号、参数、尺寸标准JX..pdf
最新-步进电机的选用及电机型号、参数、尺寸标准JX.步进电机的选用步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件。每输入一个脉冲电机转轴步进一个步距角增量。电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。步进电机惯量低、定位精度高、无累积误差、控制简单等特点。广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。选择步进电机时,首先要保证步进电机的输出功率大于负载所

步进电机选型的步骤及如何选择步进电机(精).doc
步进电机选型的步骤及如何选择步进电机在选择步进电机时可以按以下步骤进行选择这样可以避免选型不当带来的麻烦。具体如下仅供参考。1、步进电机转矩的选择步进电机的保持转矩近似于传统电机所称的“功率”。当然有着本质的区别。步进电动机的物理结构完全不同于交流、直流电机电机的输出功率是可变的。通常根据需要的转矩大小(即所要带动物体的扭力大小来选择哪种型号的电机。大致说来扭力在0.8N.m以下选择20、28、35、39、42(电机的机身直径或方度单位:mm;扭力在1N.m左右的选择57电机较为合适。扭力在几个N

步进电机选型的步骤及如何选择步进电机(精).doc
步进电机选型的步骤及如何选择步进电机在选择步进电机时可以按以下步骤进行选择,这样可以避免选型不当带来的麻烦。具体如下,仅供参考。1、步进电机转矩的选择步进电机的保持转矩,近似于传统电机所称的“功率”。当然,有着本质的区别。步进电动机的物理结构,完全不同于交流、直流电机,电机的输出功率是可变的。通常根据需要的转矩大小(即所要带动物体的扭力大小,来选择哪种型号的电机。大致说来,扭力在0.8N.m以下,选择20、28、35、39、42(电机的机身直径或方度,单位:mm;扭力在1N.m左右的,选择57电机较为合适

步进电机选型的步骤及如何选择步进电机--前桥教育.doc
步进电机选型的步骤及如何选择步进电机在选择步进电机时可以按以下步骤进行选择,这样可以避免选型不当带来的麻烦。具体如下,仅供参考。1、步进电机转矩的选择步进电机的保持转矩,近似于传统电机所称的“功率”。当然,有着本质的区别。步进电动机的物理结构,完全不同于交流、直流电机,电机的输出功率是可变的。通常根据需要的转矩大小(即所要带动物体的扭力大小),来选择哪种型号的电机。大致说来,扭力在0.8N.m以下,选择20、28、35、39、42(电机的机身直径或方度,单位:mm);扭力在1N.m左右的,选择57电机较为