
气动肌肉驱动机器人手臂的设计与控制研究的开题报告.docx

胜利****实阿

1/1
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

气动肌肉驱动机器人手臂的设计与控制研究的开题报告.docx
优秀毕业论文开题报告气动肌肉驱动机器人手臂的设计与控制研究的开题报告一、研究背景与意义机器人技术的快速发展为现代工业自动化生产提供了有效的手段,而机器人手臂作为机器人的重要组成部分,其灵活性、精度和稳定性对机器人整体性能的影响至关重要。因此,如何设计和控制机器人手臂成为了机器人领域研究的重点之一。气动肌肉作为一种新型的驱动方式,具有速度快、响应迅速、力矩大等优点,已经被广泛应用于机器人手臂的驱动系统中。然而,气动肌肉的非线性、时变等特性也给机器人手臂的设计和控制带来了挑战。因此,研究气动肌肉驱动机器人手臂
气动肌肉驱动机器人手臂的设计与控制研究的开题报告.docx
优秀毕业论文开题报告气动肌肉驱动机器人手臂的设计与控制研究的开题报告一、研究背景与意义机器人技术的快速发展为现代工业自动化生产提供了有效的手段,而机器人手臂作为机器人的重要组成部分,其灵活性、精度和稳定性对机器人整体性能的影响至关重要。因此,如何设计和控制机器人手臂成为了机器人领域研究的重点之一。气动肌肉作为一种新型的驱动方式,具有速度快、响应迅速、力矩大等优点,已经被广泛应用于机器人手臂的驱动系统中。然而,气动肌肉的非线性、时变等特性也给机器人手臂的设计和控制带来了挑战。因此,研究气动肌肉驱动机器人手臂

气动肌肉位置控制策略及其驱动并联机器人研究的综述报告.docx
气动肌肉位置控制策略及其驱动并联机器人研究的综述报告气动肌肉(PneumaticMuscles,简称PM)是一种模仿人体肌肉的先进机器人部件,具有高密度、大力矩、高刚性等优点,特别适用于机器人臂和腿的驱动。但由于PM具有非线性、不可逆等特性,其位置控制一直是困扰机器人控制领域的难题。本文对气动肌肉位置控制策略及其驱动并联机器人的研究进行综述。一、气动肌肉位置控制策略1.模型预测控制(ModelPredictiveControl,简称MPC)MPC是一种基于数学模型的高级控制技术,用于预测被控对象的行为并作

气动肌肉驱动7自由度仿生机械臂的类人运动控制研究的开题报告.docx
气动肌肉驱动7自由度仿生机械臂的类人运动控制研究的开题报告本文将围绕气动肌肉驱动7自由度仿生机械臂的类人运动控制研究展开,论述气动肌肉的概念、仿生机械臂的特点、类人运动控制的技术路线以及针对该机械臂的具体运动控制方法等方面进行细致的探讨。1.研究目的机械臂作为一种重要的工业自动化技术,在各个领域应用广泛。仿生机械臂是以自然界生物结构为模板,仿照其生物机理和运动方式,最终实现机械臂的优化设计和控制。气动肌肉驱动仿生机械臂则是一种新型的机械臂结构,其特殊的材料和驱动方式使其表现出类人的动态特性,具有更高的运动
一种气动肌肉驱动的Delta机器人.pdf
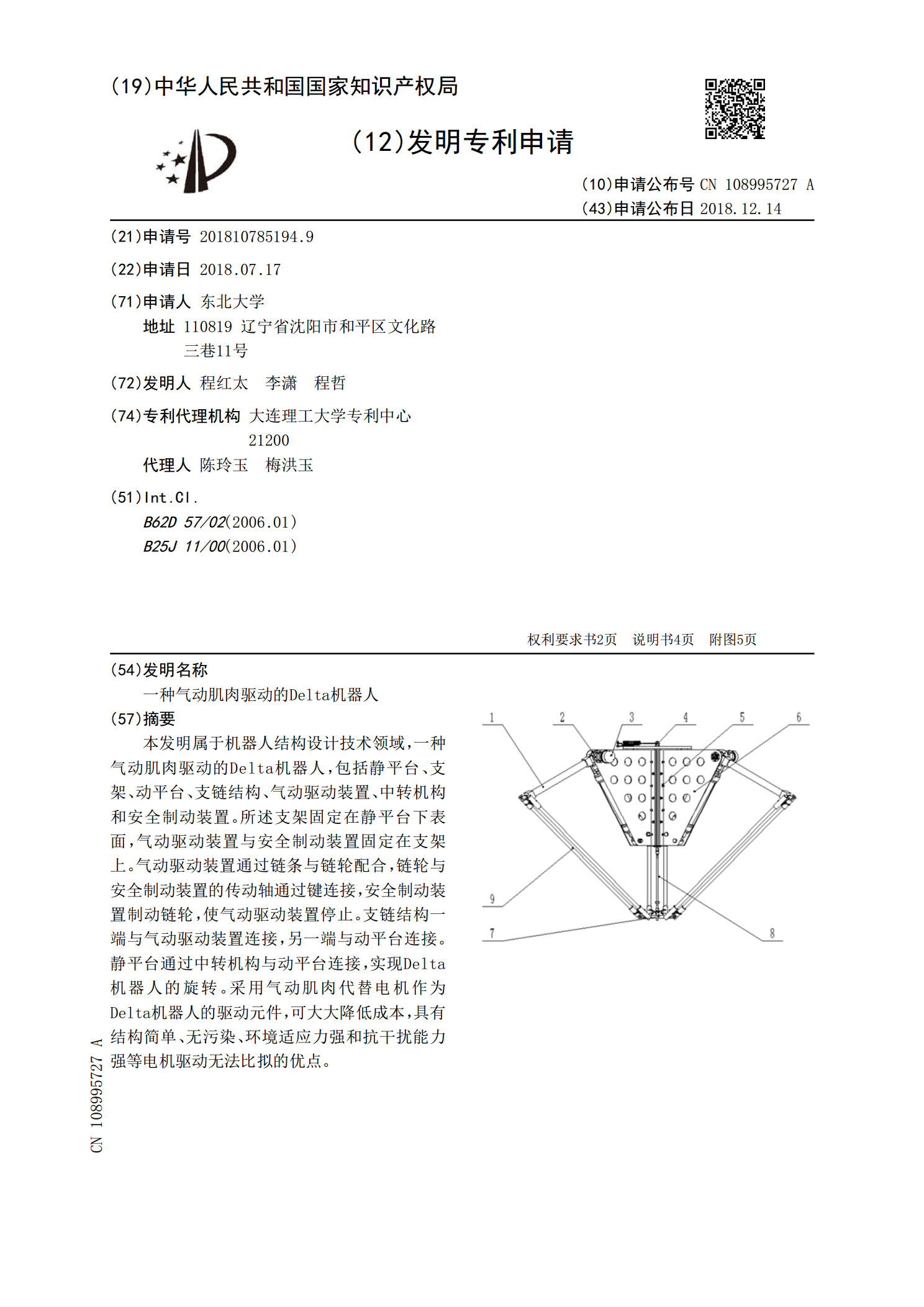
本发明属于机器人结构设计技术领域,一种气动肌肉驱动的Delta机器人,包括静平台、支架、动平台、支链结构、气动驱动装置、中转机构和安全制动装置。所述支架固定在静平台下表面,气动驱动装置与安全制动装置固定在支架上。气动驱动装置通过链条与链轮配合,链轮与安全制动装置的传动轴通过键连接,安全制动装置制动链轮,使气动驱动装置停止。支链结构一端与气动驱动装置连接,另一端与动平台连接。静平台通过中转机构与动平台连接,实现Delta机器人的旋转。采用气动肌肉代替电机作为Delta机器人的驱动元件,可大大降低成本,具有结