
GPS卫星的导航电文解析.pptx

胜利****实阿

1/10

2/10

3/10
4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共66页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

GPS卫星的导航电文解析.pptx
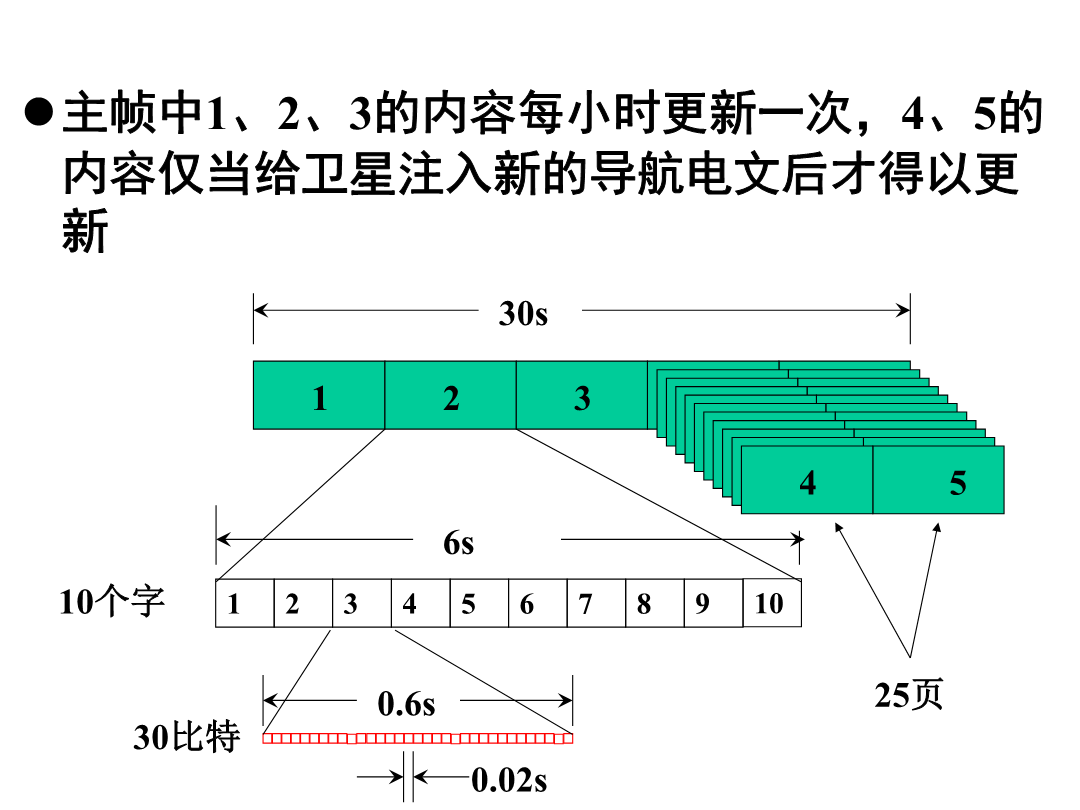
GPS测量原理及应用(四)主讲人:马福义导航电文包含有关卫星的星历、卫星工作状态、时钟改正、卫星钟运行状态、轨道摄动改正、大气折射改正和由C/A码捕获P码等导航信息。导航电文又称为数据码(或D码)。导航电文也是二进制码,依规定格式组成,按帧向外播送。每帧电文含有1500比特,播送速度50bit/s,每帧播送时间30s。主帧中1、2、3的内容每小时更新一次,4、5的内容仅当给卫星注入新的导航电文后才得以更新遥测码(TLM–TelemetryWord)每一子帧的第1个字用作捕获导航电文的前导转换码(HOW–H

GPS卫星的测距码信号和GPS卫星的导航电文.doc
第五讲GPS卫星的测距码信号和GPS卫星的导航电文学习指南在这一章节中,主要讲述了GPS全球卫星定位系统的组成,简单地介绍了GPS卫星信号、GPS卫星星历和卫星运动理论基础。重点介绍了GPS卫星信号特点及其应用。对本章的学习要重点突出GPS系统的组成、GPS卫星信号的应用,理解和掌握GPS卫星位置计算的各项参数物理意义和几何特点。本单元教学重点和难点1、GPS编码的方法;2、导航电文的格式和内容。教学目标1、了解GPS卫星信号的作用;2、熟悉GPS编码的方法;3、熟悉导航电

作用将导航电文注入GPS卫星.ppt
第二章全球定位系统的组成及信号结构§2.1全球定位系统的组成GPS的系统组成GPS的空间部分①GPS的空间部分②GPS的空间部分③GPS的空间部分④GPS的空间部分⑤GPS卫星(续)类型试验卫星:BlockⅠ工作卫星:BlockⅡBlockⅡ:存储星历能力为14天,具有SA和AS地能力BlockⅡA(Advanced):卫星间可相互通讯,存储星历能力为180天,SV35和SV36带有激光反射棱镜BlockⅡR(Replacement/Replenishment):卫星间可相互跟踪相互通讯BlockⅡF(F

GPS测量原理与应用 第四章 GPS卫星导航电文和卫星信号.ppt
第四章GPS卫星导航电文和卫星信号每一子帧都是以一个遥测码(TLM)和一个转换码(HOW)开始。如图,第一个字码主要是遥测码,其中第1~8比特是同步码,作为识别电文内容的序文;其余主要是供监测站使用的信息。第二个字码为转换码,完成由C/A码至P码的转换,转换的作用是帮助用户从捕获的C/A码转换到对P码的捕获;并以同步进行锁定。其它第三到第十个字码部分为数据块和电文块,第一子帧内为数据块I,第二、三子帧为数据块Ⅱ,第四子帧为电文块,第五子帧为数据块Ⅲ。导航电文格式如图。(一)数据块I数据块I主要是卫星时钟校

GPS信号格式和导航电文.pptx
GPS信号结构与导航电文5.1GPS信号结构5.2GPS卫星的导航电文GPS卫星信号示意图GPS信号自相关特性GPS信号GPS信号GPS信号GPS信号伪距测量在载波上,调制有C/A码、P码(或Y码)的数据码,完整的信号结构为:在载波上,只用P码进行双相调制,其信号结构为:最远的距离=25785×103,发射功率为(14.3dBW+14.7dBW),则接收机接收到的功率为-157.8dBW,如果考虑大气损耗,接收机接收到的信号最小为160dBW一般条件下,GPS信号到达地面的强度大约为-130dBm/2MH