
雷达气象学520.pptx

胜利****实阿

1/10
2/10
3/10

4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共37页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

雷达气象学520.pptx
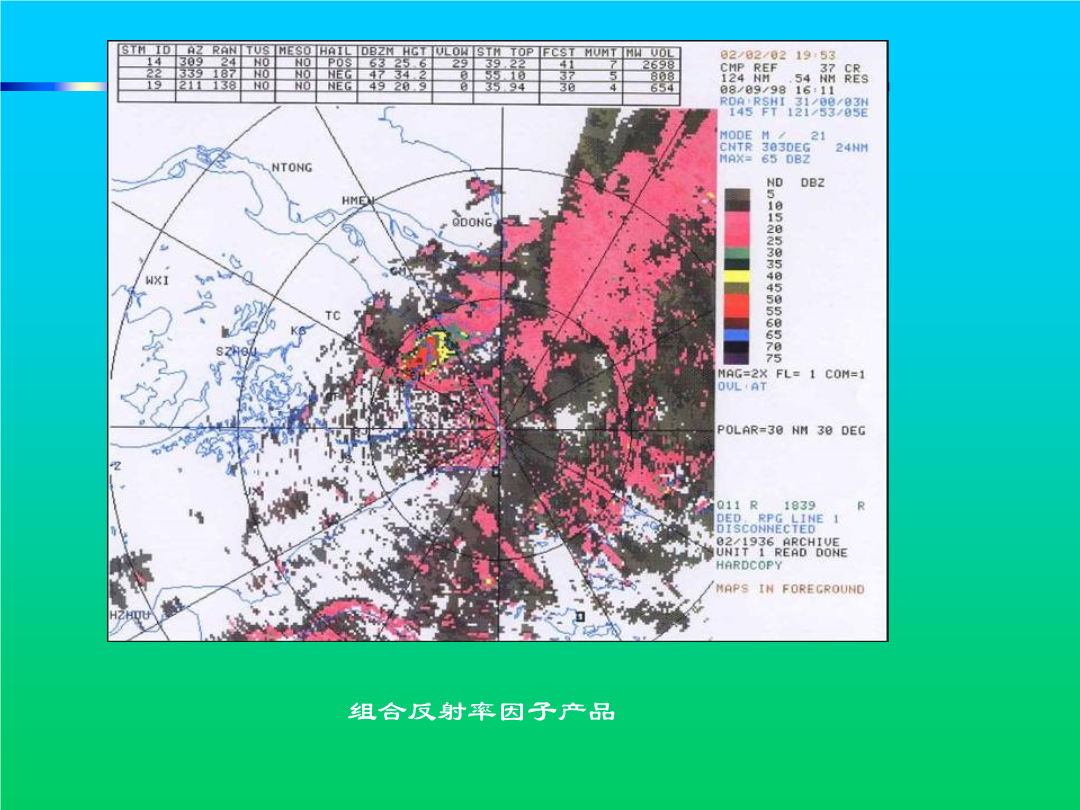
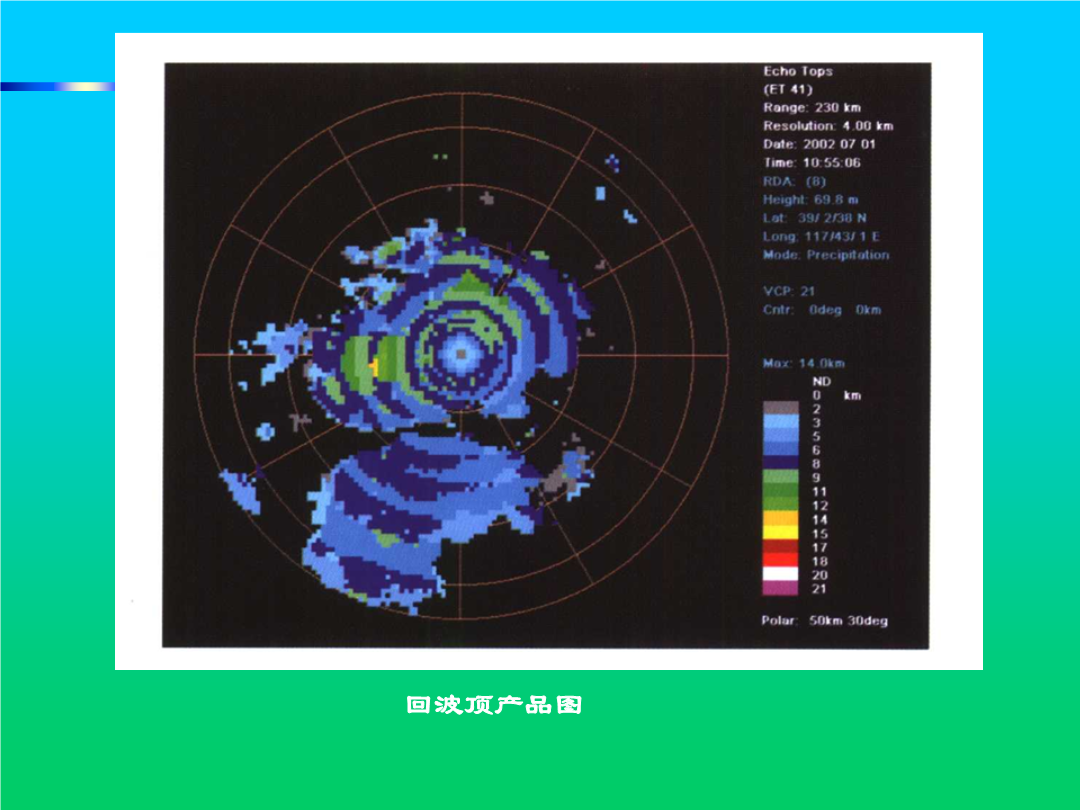
第五章雷达产品与算法5.1基本产品5.2一些算法简单的重要导出产品5.3风暴单体识别与跟踪算法及其产品5.4冰雹指数产品及其算法5.5降水算法及其产品5.6VAD风廓线算法5.7中气旋(M)和龙卷式涡旋特征(TVS)算法与产品5.2一些算法简单的重要导出产品组合反射率因子产品2.回波顶(ET)回波顶产品图3.垂直累积液态水(VIL)垂直液态水含量图4.剖面产品反射率因子剖面产品风暴单体识别与跟踪算法是CINRAD-SA雷达中最重要的一个算法。首先它用于识别风暴单体。一个风暴单体就是一个在三维空间中能分辨的

雷达气象学.ppt
四川省气象局招聘130多人,内蒙古气象局招聘110多人,山东省气象局招聘80多人……11月28日,在南京信息工程大学举办的2008年全国气象部门人才招聘会上,中国气象局在京直属单位和全国31个省、自治区、直辖市气象局等160多家用人单位进场“招兵买马”,几千名应届毕业生踊跃竞聘,据初步统计,南信大气象类应届毕业生中六成以上毕业生在现场与用人单位达成了就业意向。南信大每年气象专业约有本科和研究生毕业生700多人,除去40%左右选择出国或继续深造,该校每年为全国气象部门输送气象专业人才500多人,是我国最重要
雷达气象学240.pptx
第二章雷达探测大气的基础知识地球球面和大气折射对雷达探测距离的影响2、回波高度查算图的制作和应用标准大气时的测高公式回波高度查算图的制作和应用3、测高误差3、测高误差4、等射束高度图绘制地(1)物阻挡图标准大气折射(2)绘制等射束高度图标准大气折射5、雷达分辨率(1)径向分辨率脉冲长度:可能会造成h/2的误差,但由于脉冲长度不随距离而改变,因此不管有多大距离,h/2径向分辨率是不随距离改变的。接收机频带宽度:由于接收机通频带有一定宽度ΔF,它就不能使经中放、检波后得到的回波视频信号和原来的发射脉冲完全一样
雷达气象学110.pptx
目录第一章绪论第二章雷达探测大气的基础知识第三章雷达气象方程第四章多普勒天气雷达第五章天气雷达产品与算法第六章天气雷达回波的识别技术第七章中小尺度天气系统的回波特征第八章大尺度天气系统的回波特征第一章绪论第一节概述名字:“雷达”是RadioDetectionAndRanging缩写Radar的音译,字面上含义是无线电探测和测距。雷达:是用无线电方法发现并测定空间目标的位置。用途:从二次世界大战后雷达技术引用到气象部门至今已有50多年历史。用于探测云、雨、降水、监测强对流天气的天气雷达已成为雷达技术中的一个

雷达气象学0.pptx
目录第一章绪论第二章雷达探测大气的基础知识第三章雷达气象方程第四章多普勒天气雷达第五章天气雷达产品与算法第六章天气雷达回波的识别技术第七章中小尺度天气系统的回波特征第八章大尺度天气系统的回波特征第一章绪论第一节概述名字:“雷达”是RadioDetectionAndRanging缩写Radar的音译,字面上含义是无线电探测和测距。雷达:是用无线电方法发现并测定空间目标的位置。用途:从二次世界大战后雷达技术引用到气象部门至今已有50多年历史。用于探测云、雨、降水、监测强对流天气的天气雷达已成为雷达技术中的一个