
齐次变换00.pptx

胜利****实阿

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共37页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
齐次变换00.pptx
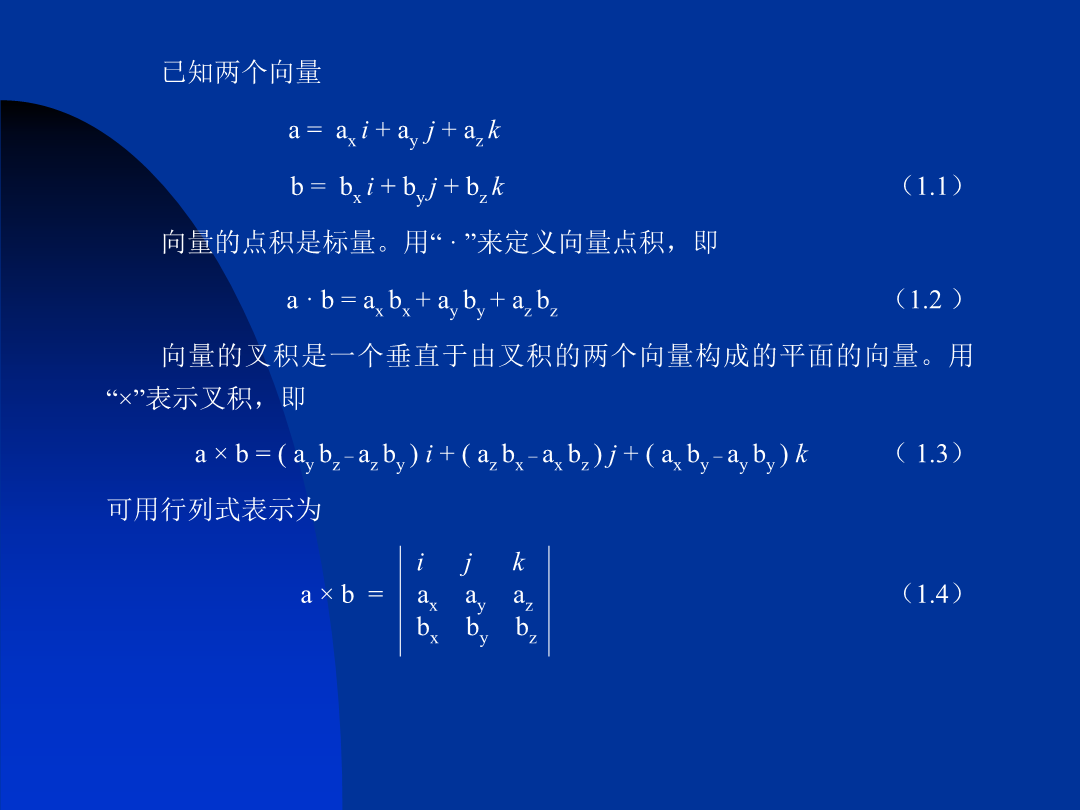
第三章工业机器人运动学引言主要内容一、机器人数学基础——齐次坐标变换1.1引言(Introduction)已知两个向量a=axi+ayj+azkb=bxi+byj+bzk(1.1)向量的点积是标量。用“·”来定义向量点积,即a·b=axbx+ayby+azbz(1.2)向量的叉积是一个垂直于由叉积的两个向量构成的平面的向量。用“×”表示叉积,即a×b=(aybz¯azby)i+(azbx¯axbz)j+(axby¯ayby)k(1.3)可用行列式表示为ijka×b=axayaz(1.4)bxbybz1.2
齐次坐标变换.pptx
第二章齐次坐标变换ChapterⅡHomogeneousTransformation2.1引言(Introduction)已知两个向量a=axi+ayj+azkb=bxi+byj+bzk(2.1)向量的点积是标量。用“·”来定义向量点积,即a·b=axbx+ayby+azbz(2.2)向量的叉积是一个垂直于由叉积的两个向量构成的平面的向量。用“×”表示叉积,即a×b=(aybz¯azby)i+(azbx¯axbz)j+(axby¯ayby)k(2.3)可用行列式表示为ijka×b=axayaz(2.4)b

齐次坐标变换.ppt
第二章齐次坐标变换ChapterⅡHomogeneousTransformation2.1引言(Introduction)a已知两个向量a=axi+ayj+azkb=bxi+byj+bzk(2.1)向量的点积是标量。用“·”来定义向量点积,即a·b=axbx+ayby+azbz(2.2)向量的叉积是一个垂直于由叉积的两个向量构成的平面的向量。用“×”表示叉积,即a×b=(aybz¯azby)i+(azbx¯axbz)j+(axby¯ayby)k(2.3)可用行列式表示为ijka×b=axayaz(2.4)

第2章 齐次变换.ppt
第二章空间描述和变换向量点积点向量表示(2维)绕原点(Z轴)旋转(2维)绕原点(Z轴)旋转(2维)绕Z轴旋转(3维)旋转矩阵性质考题绕主轴旋转的旋转矩阵考题旋转算子考题相对于当前主轴的复合旋转相对于当前主轴复合变换的规律考题相对于固定主轴的复合旋转线性代数中的相似变换相对于固定主轴的复合旋转相对于固定主轴复合变换的规律考题考题X-Y-Z固定角坐标系X-Y-Z固定角坐标系逆解Z-Y-X欧拉角坐标系Z-Y-X欧拉角坐标系逆解考题考题Z-Y-Z欧拉角坐标系Z-Y-Z欧拉角坐标系逆解一般性旋转变换(等效轴角坐标系

齐次坐标变换课件教案.pptx
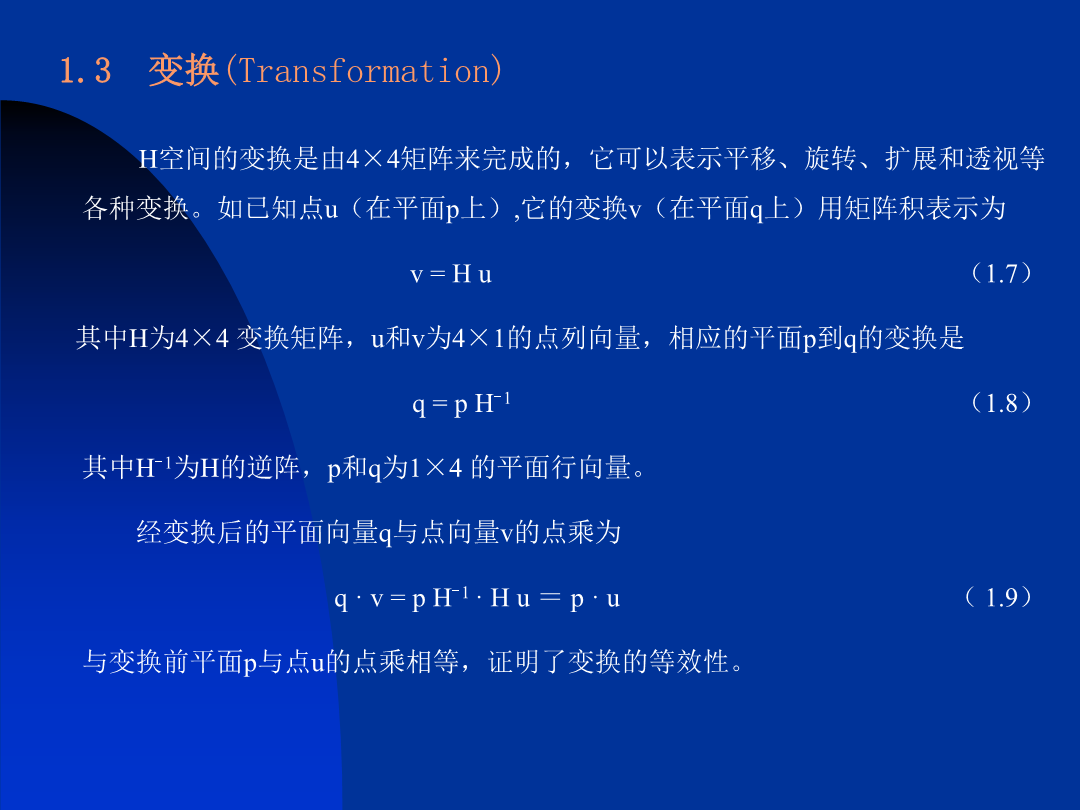
会计学2.1引言(Introduction)已知两个向量a=axi+ayj+azkb=bxi+byj+bzk(2.1)向量的点积是标量。用“·”来定义向量点积,即a·b=axbx+ayby+azbz(2.2)向量的叉积是一个垂直于由叉积的两个向量构成的平面的向量。用“×”表示叉积,即a×b=(aybz¯azby)i+(azbx¯axbz)j+(axby¯ayby)k(2.3)可用行列式表示为ijka×b=axayaz(2.4)bxbybz2.2.2平面(Planes)H空间的变换是由4×4矩阵来完成的,它