
计算机控制课程设计报告——逐点比较法直线插补原理的实现.doc

胜利****实阿

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

计算机控制课程设计逐点比较法直线插补原理的实现.doc
武汉理工大学《计算机控制技术》课程设计说明书武汉理工大学《微型计算机控制技术》课程设计说明书课程设计任务书学生姓名:专业班级:指导教师:工作单位:题目:逐点比较插补原理的实现初始条件:设计一个计算机控制步进电机系统,该系统利用PC机的并口输出控制信号,其信号驱动后控制X、Y两个方向的三相步进电机转动,利用逐点比较法插补绘制出如下曲线。要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1.设计硬件系统,画出电路原理框图;2.定义步进电机转动的控制
逐点比较法直线插补原理的实现.pdf
武汉理工大学《微型计算机控制技术》课程设计说明书武汉理工大学华夏学院课程设计报告书题目:系名:专业班级:姓名:学号:指导教师:2011年6月14日武汉理工大学《微型计算机控制技术》课程设计说明书摘要本文主要讨论利用逐点比较法实现第一象限的直线插补。所谓逐点比较插补,就是刀具或绘图笔每走一步都要和给点轨迹上的坐标值进行比较,看这点在给点轨迹的上方还是下方,从而决定下一步的进给方向。对于本设计所要求的直线轨迹,如果该点在直线的上方,则控制步进电机向+X方向进给一步,如果该点在直线的下方,那么控制步进电机向+Y

计算机控制课程设计报告——逐点比较法直线插补原理的实现.doc
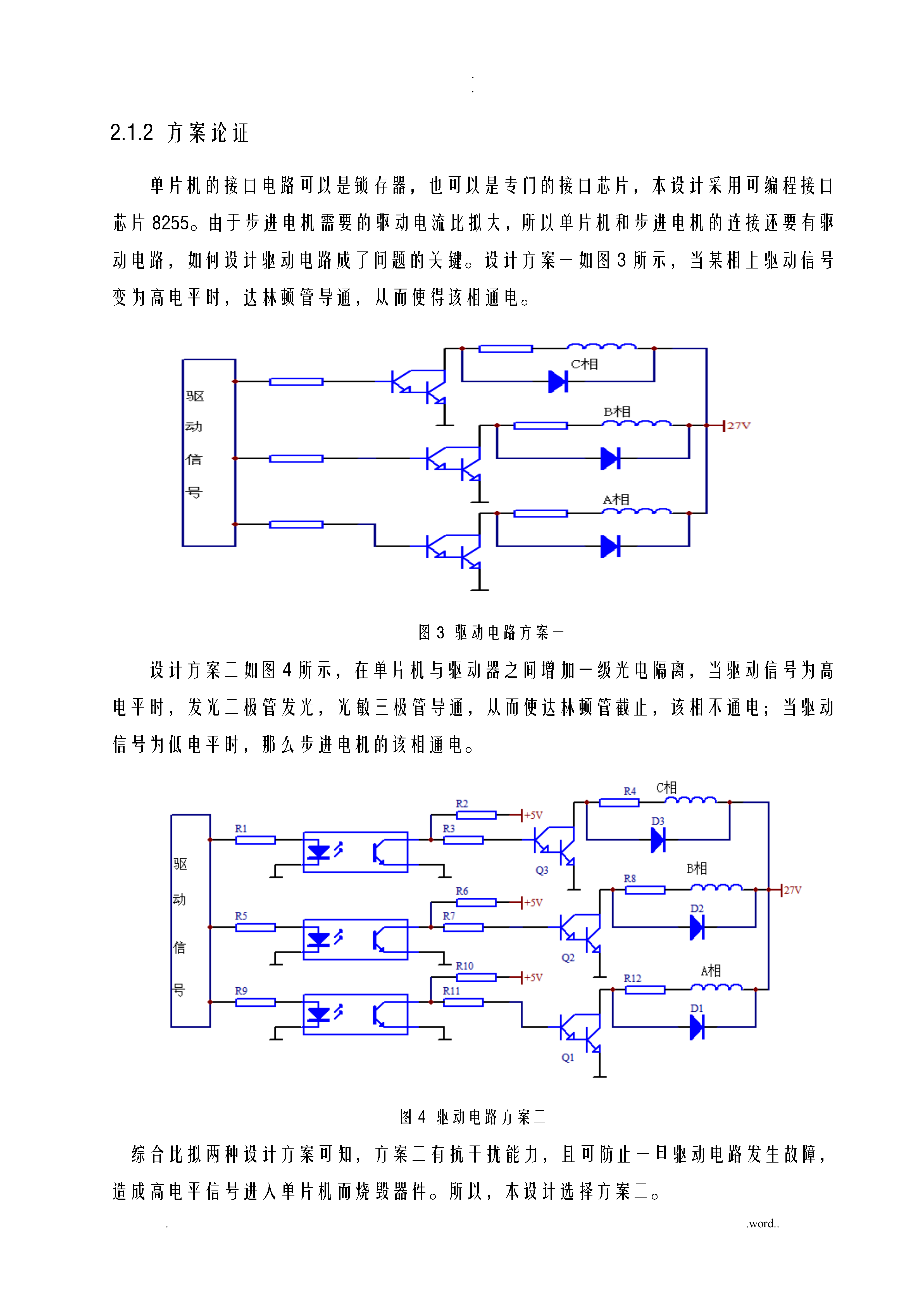
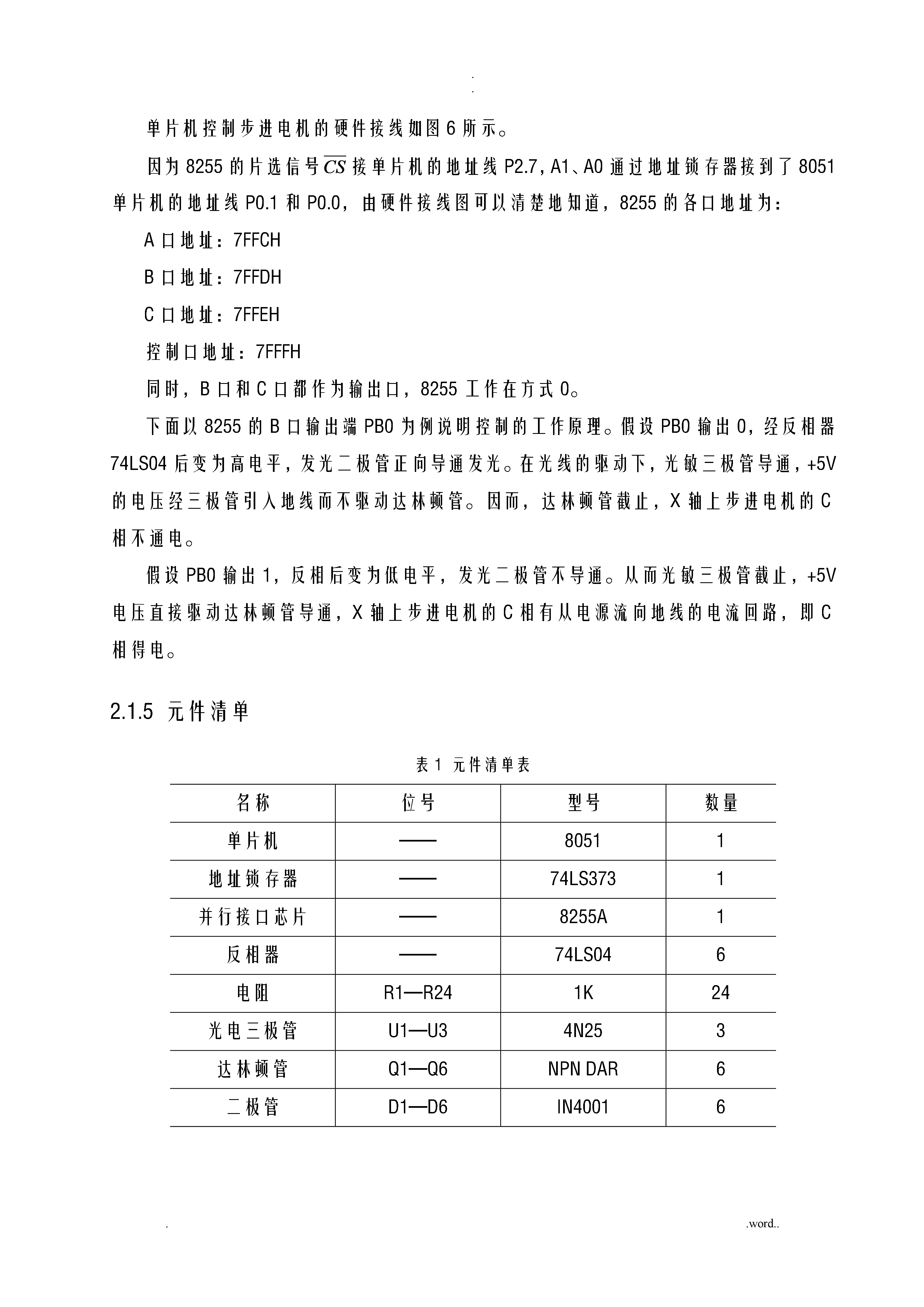
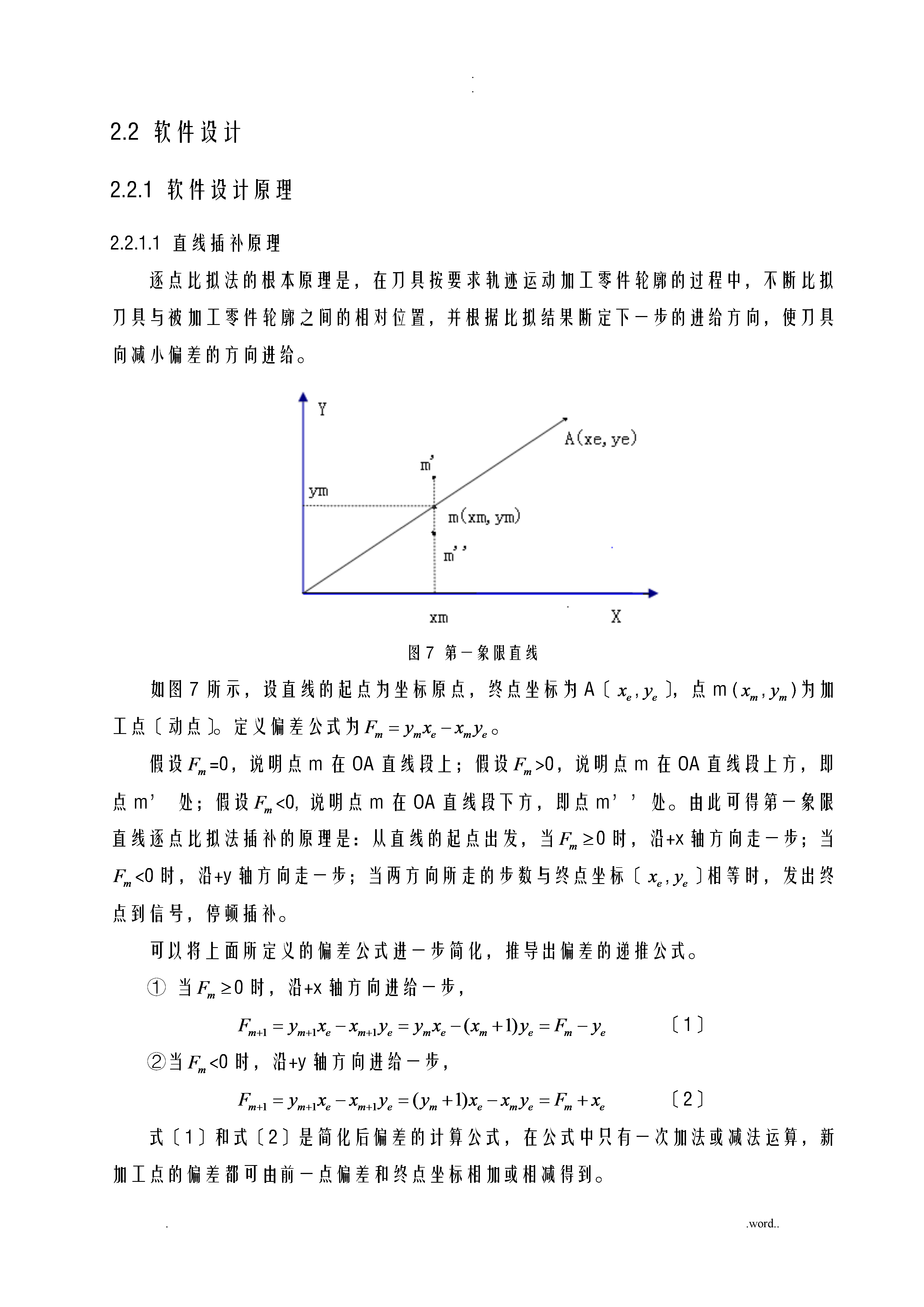
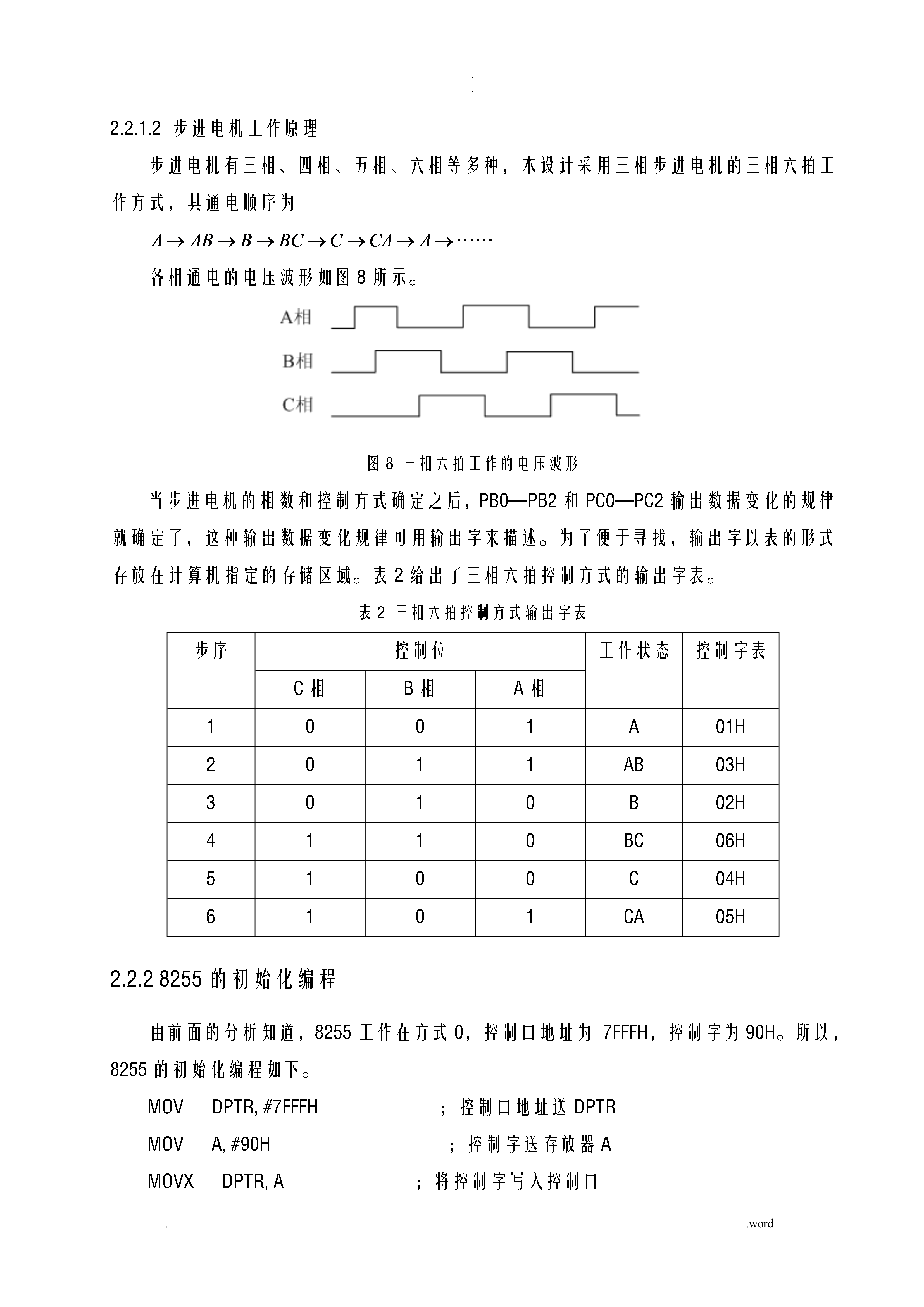
....word...-.-可修编.课程设计任务书学生XX:专业班级:指导教师:工作单位:题目:逐点比拟插补原理的实现初始条件:设计一个计算机控制步进电机系统,该系统利用PC机的并口输出控制信号,其信号驱动后控制X、Y两个方向的三相步进电机转动,利用逐点比拟法插补绘制出如下曲线。要求完成的主要任务:〔包括课程设计工作量及其技术要求,以及说明书撰写等具体要求〕1.设计硬件系统,画出电路原理框图;2.定义步进电机转动的控制字;3.推导出用逐点比拟法插补绘制出下面曲线的算法;4.编写算法控制程序,参数由键盘输入

计算机控制课程设计逐点比较法直线插补原理的实现.doc
武汉理工大学《计算机控制技术》课程设计说明书武汉理工大学《微型计算机控制技术》课程设计说明书课程设计任务书学生姓名:专业班级:指导教师:工作单位:题目:逐点比较插补原理的实现初始条件:设计一个计算机控制步进电机系统,该系统利用PC机的并口输出控制信号,其信号驱动后控制X、Y两个方向的三相步进电机转动,利用逐点比较法插补绘制出如下曲线。要求完成的主要任务:(包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1.设计硬件系统,画出电路原理框图;2.定义步进电机转动的控制

逐点比较法直线插补.doc
§2—1逐点比较法逐点比较法是我国数控机床中广泛采用的一种插补方法,它能实现直线、圆弧和非圆二次曲线的插补,插补精度较高。逐点比较法,顾名思义,就是每走一步都要将加工点的瞬时坐标同规定的图形轨迹相比较,判断其偏差,然后决定下一步的走向,如果加工点走到图形外面去了,那么下一步就要向图形里面走;如果加工点在图形里面,那么下一步就要向图形外面走,以缩小偏差。这样就能得出一个非常接近规定图形的轨迹,最大偏差不超过一个脉冲当量。在逐点比较法中,每进给一步都须要进行偏差判别、坐标进给、新偏差计算和终点比较四个节拍。下