
MATLAB和Simulink的建模与控制.doc

胜利****实阿


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
MATLAB和Simulink的建模与控制.doc
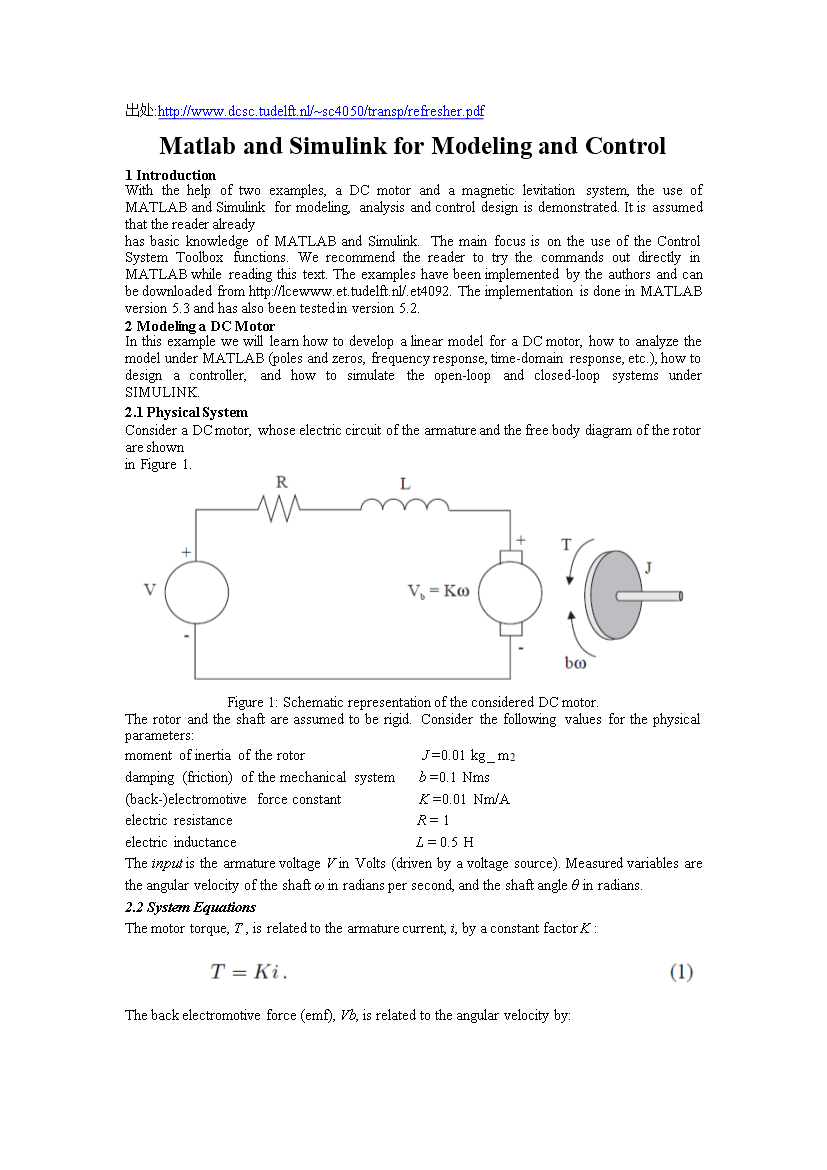
出处:http://www.dcsc.tudelft.nl/~sc4050/transp/refresher.pdfMatlabandSimulinkforModelingandControl1IntroductionWiththehelpoftwoexamples,aDCmotorandamagneticlevitationsystem,theuseofMATLABandSimulinkformodeling,analysisandcontroldesignisdemonstrated.Itisassu

matlab的simulink仿真建模举例.pdf
matlab的simulink仿真建模举例Matlab的Simulink仿真建模举例Simulink是Matlab的一个工具包,用于建模、仿真和分析动态系统。它提供了一个可视化的环境,允许用户通过拖放模块来构建系统模型,并通过连接和配置这些模块来定义模型的行为。Simulink是一种功能强大的仿真平台,可以用于解决各种不同类型的问题,从控制系统设计到数字信号处理,甚至是嵌入式系统开发。在本文中,我们将通过一个简单的例子来介绍Simulink的基本概念和工作流程。我们将使用Simulink来建立一个简单的电

详解matlab simulink 通信系统建模与仿真.pdf
详解matlabsimulink通信系统建模与仿真MATLABSimulink是一款广泛应用于通信系统建模和仿真的工具。它提供了一种直观的方式来设计和测试通信系统,使得工程师可以更快地开发出高质量的通信系统。本文将详细介绍MATLABSimulink在通信系统建模和仿真方面的应用。一、MATLABSimulink的基本概念MATLABSimulink是一种基于图形化界面的建模和仿真工具。它可以通过拖拽和连接不同的模块来构建一个完整的系统模型。每个模块代表了系统中的一个组件,例如滤波器、调制器、解调器等。用

详解matlab simulink 通信系统建模与仿真.pdf
matlabsimulink通信系统建模与仿真MATLABSimulink是一款广泛应用于通信系统建模和仿真的工具。它提供了一种直观的方式来设计和测试通信系统,使得工程师可以更快地开发出高质量的通信系统。本文将详细介绍MATLABSimulink在通信系统建模和仿真方面的应用。一、MATLABSimulink的基本概念MATLABSimulink是一种基于图形化界面的建模和仿真工具。它可以通过拖拽和连接不同的模块来构建一个完整的系统模型。每个模块代表了系统中的一个组件,例如滤波器、调制器、解调器等。用户可

自动控制和MatLab_SimuLink之关联.doc
自動控制和MatLab/SimuLink之關聯黃柏誠生機三乙0914379摘要:現在只要想到自動控制的程式,第一個想到的就是MATLAB。MATLAB可以直接進行運算,不需要再做許多的假設,且不虛太過擔心錯誤。而其中的SIMULINK更市一個可以直接模擬整個模型的平台,每個元件,每個流程都可以在SIMLINK上做模擬,且可以很快得到結果。關鍵字:MATLAB,SIMULINK前言:自動控制系統是由一個模型,來探討內部的各種響應等等的關聯,進而去討論這個模型。而MATLAB/SIMULINK這套軟體就是提供