
可编程控制器PLC应用.doc

胜利****实阿

1/10
2/10
3/10

4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

可编程控制器PLC应用.doc
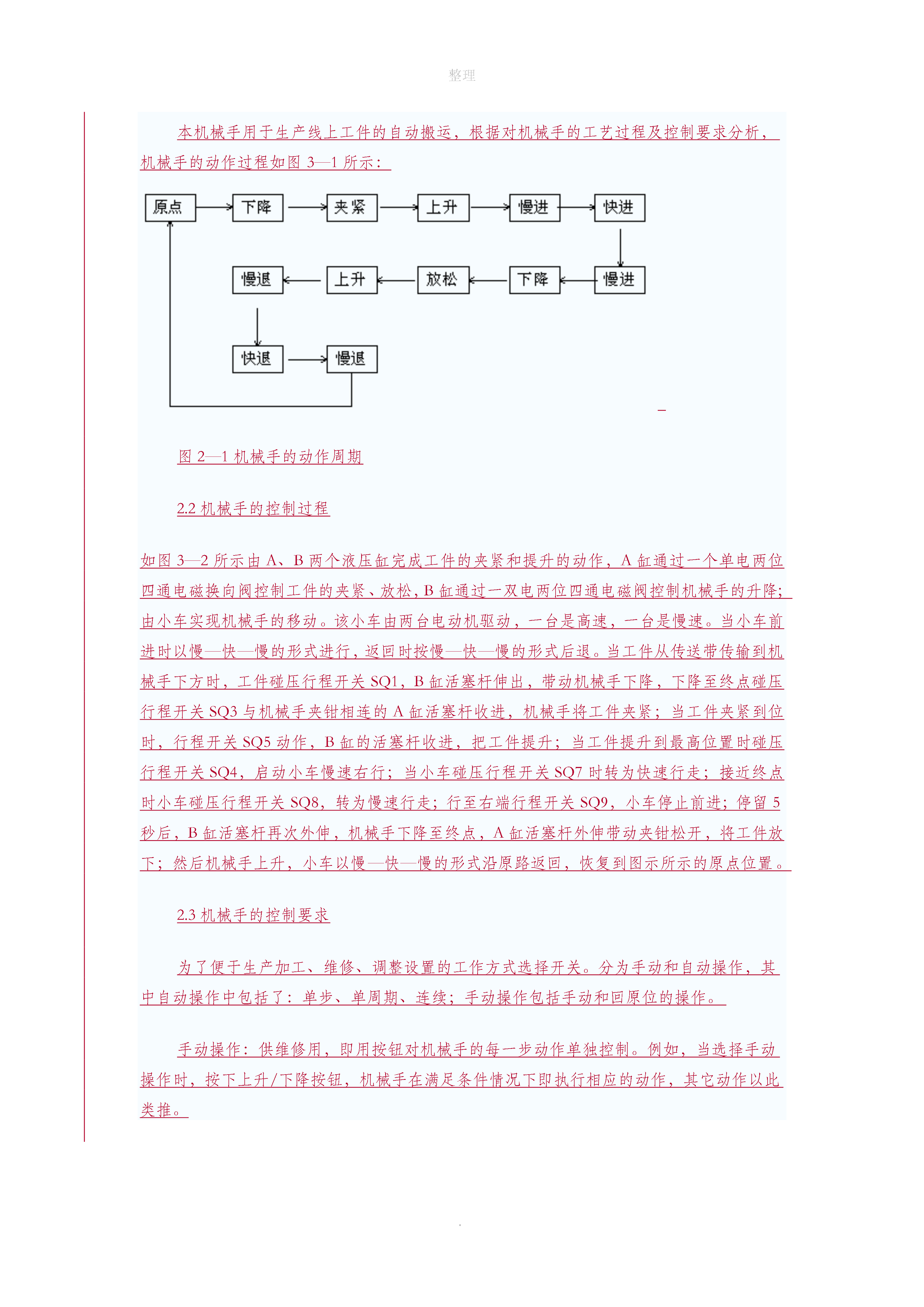
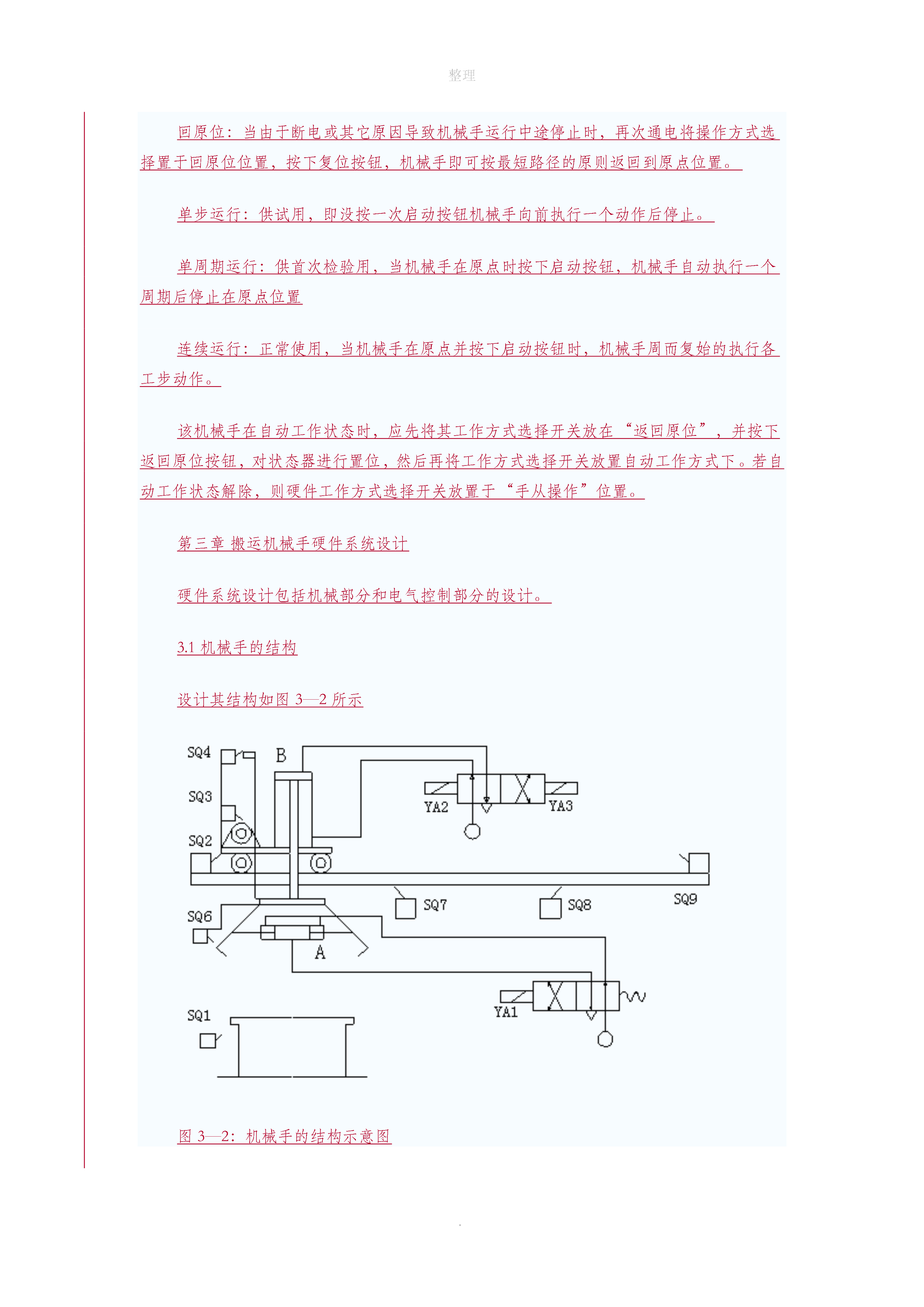
整理整理..整理.可编程控制器PLC应用列--机械手摘要随着工业自动化的普及和发展,控制器的需求量逐年增大,搬运机械手的应用也逐渐普及,主要在汽车,电子,机械加工、食品、医药等领域的生产流水线或货物装卸调运,可以更好地节约能源和提高运输设备或产品的效率,以降低其他搬运方式的限制和不足,满足现代经济发展的要求。本机械手的机械结构主要包括由两个电磁阀控制的液压钢来实现机械手的上升下降运动及夹紧工件的动作,两个转速不同的电动机分别通过两线圈控制电动机的正反转,从而实现小车的快进、慢进、快退、慢退的运动运动;其动

PLC可编程控制器的应用.doc
通过安装压力控制系统稳定前处理热水循环管道压力作者:×××单位:××××××××通过安装压力控制系统稳定前处理热水循环管道压力单位:作者:××摘要本文对车身厂涂装二车间前处理热水循环系统进行简介。长期以来,前处理供热管道补水工作,一直是以人工“手动”作业,因此时常发生补水不足及过量补水问题,造成管道压力波动较大,并带来一系列的设备故障、能源损失及人员操作等问题,因此,我们针对这个问题提出课题进行研究,通过设计安装热水循环管道的压力控制系统(自动补水、泄压装置及报警功能),对热水循环管道的压力实施自动控制,

可编程控制器PLC应用.ppt
第10章可编程控制器应用10.1可编程控制器的结构及工作原理20世纪60年代末期,美国汽车制造工业竞争激烈,为了适应生产工艺不断更新的需要,在1968年美国通用汽车公司(GM)首先公开招标,对控制系统提出的具体要求基本为:①继电控制系统设计周期短,更改容易,接线简单,成本低。②能把计算机的功能和继电控制系统结合起来,但编程又比计算机简单易学,操作方便。③系统通用性强。可编程控制器的发展大体可分为以下几个阶段:第1阶段:可编程控制器刚问世时,功能十分简单,只有逻辑运算、定时、计数等功能。第2阶段:集成电路技

可编程控制器(PLC)应用举例.doc
学习目标:通过典型实例的分析,掌握可编程控制器设计的步骤;掌握程序调试方法;能够依据控制要求,进行顺序控制梯形图的设计。可编程控制器应用举例两种液体混合装置设有两种液体A和B,在容器内按照一定比例进行混合搅拌,装置结构如图6-1所示。其中,SL1、SL2、SL3为液面传感器,当液面淹没时为ON;YV1、YV2、YV3为电磁阀;M为搅拌电动机。图6-1两种液体混合装置一、控制要求1.初始状态此时各阀门关闭,容器是空的。YV1=YV2=YV3=OFFSL1=SL2=SL3=OFFM=OFF2.起动操作按下起按
可编程控制器(PLC)的原理及应用.pdf
第9章可编程控制器9.1可编程控制器概述可编程控制器是一种数字运算操作的电子系统,专为在工业环境下应用而设计。它采用了可编程序的存储器,用来在其内部存储执行逻辑运算,顺序控制,定时,计数和算术操作等面向用户的指令,并通过数字式或模拟式的输入/输出,控制各种类型的机械或生产过程。早期产品名称为“ProgrammableLogicController”(可编程逻辑控制器),简称PLC,主要替代传统的继电接触控制系统。随着微处理器技术的发展,可编程控制器的功能也不断地增加,因而可编程逻辑控制器(PLC)不能描述