
E+H雷达液位计0.ppt

胜利****实阿

1/10
2/10
3/10
4/10
5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

E+H雷达液位计0.ppt
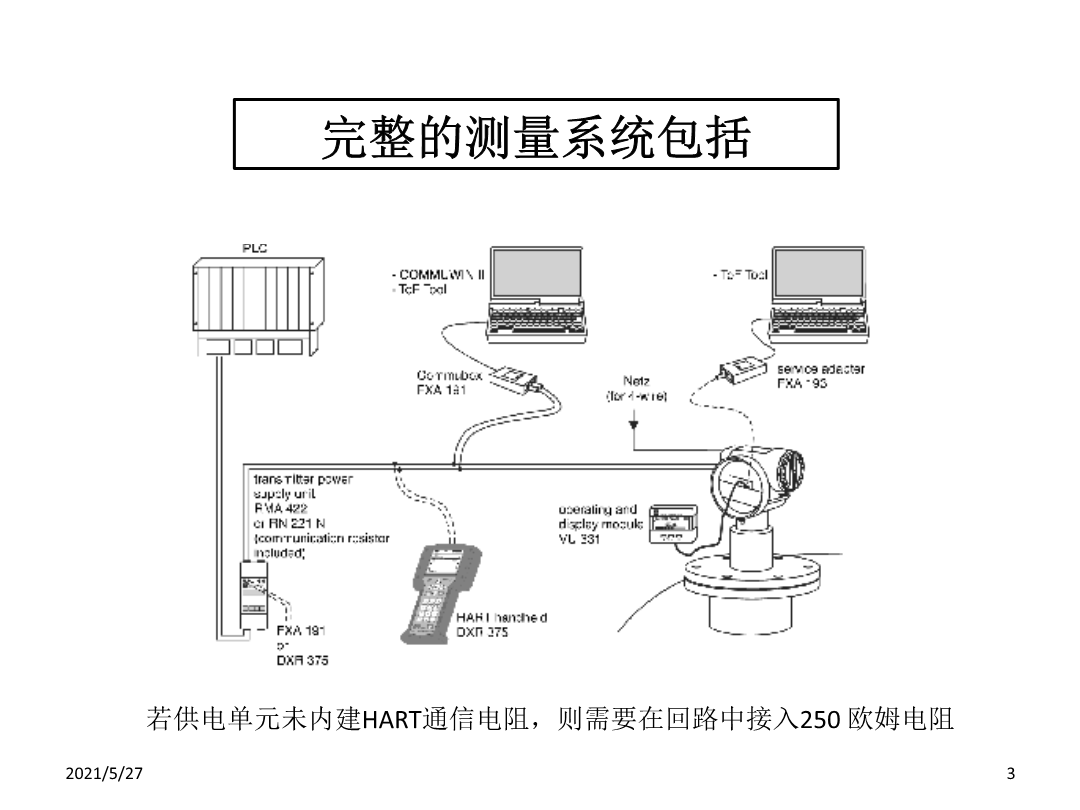
E+H雷达液位计使用及维护MICROPILOTMFMR230是一种一体化的雷达物位变送器,用于液体浆料及污泥的连续非接触测量该设备可安装在密闭的金属容器外,这是因为其操作频率为约6GHZ,而其最大辐射脉冲能量为(平均功率输出1μW)该设备对人体及动物完全无害。MicropilotM是一种“俯视式”时间行程测量系统。用于测量从参考点(即过程连接)到物料表面的间距。天线发出微波脉冲,在被测物料表面产生反射,并被雷达系统所接收。若供电单元未内建HART通信电阻,则需要在回路中接入250欧姆电阻测量安装示意图雷达

Saable雷达液位计.doc
SaabTankRadarPRO具有灵活配置的SaabTankRadarPro适用于独立应用或有各种类型储罐的大型工厂装置特点无移动部件无需维修可靠性最高容易安装精度高超高灵敏度与独特信号处理特点可处理困难的工艺过程条件高度灵活性,发射器头与天线都有互换性广泛系列的天线与型式可在所有应用中提供最好性能用基于微软视窗的PC软件或经就地带键盘的显示器实现人-机对话式的设置输出为叠加于HART的4-20mA信号、数字式ProfibusDP或TRL2现场总线信号。测量原理液位(或料位)是由储罐顶部的天线发射的雷

雷达液位计的种类.ppt
雷达液位计的种类

雷达液位计的工作原理.pdf
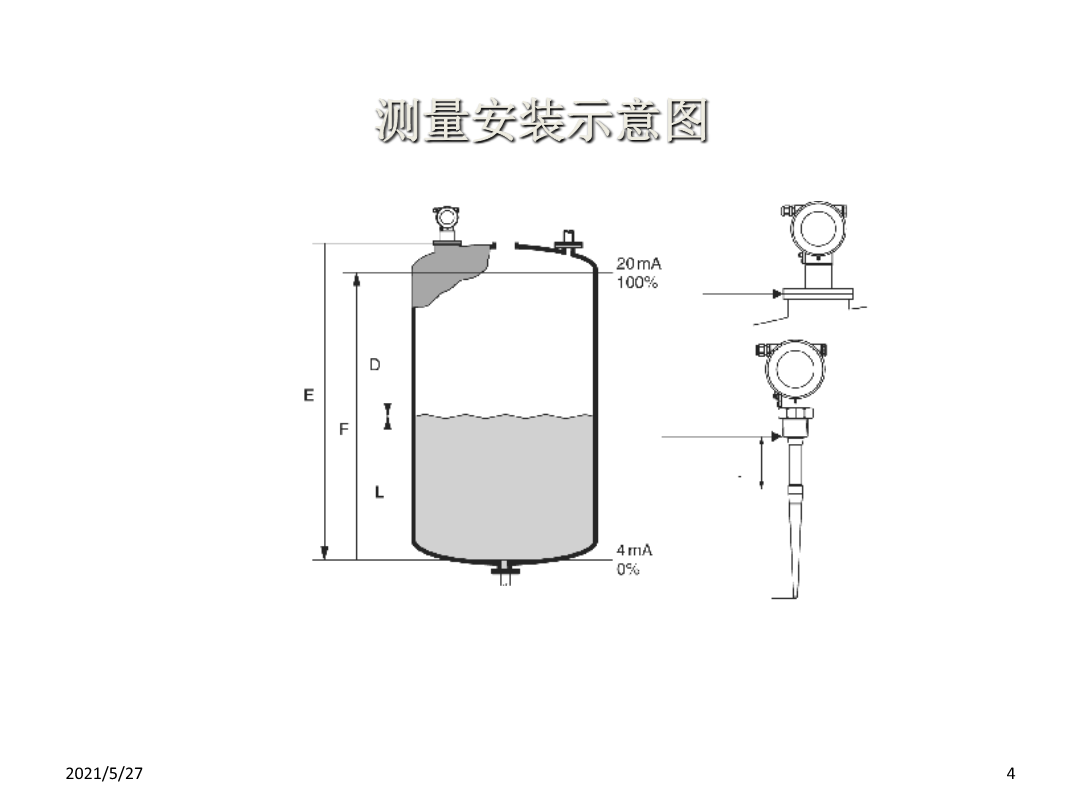
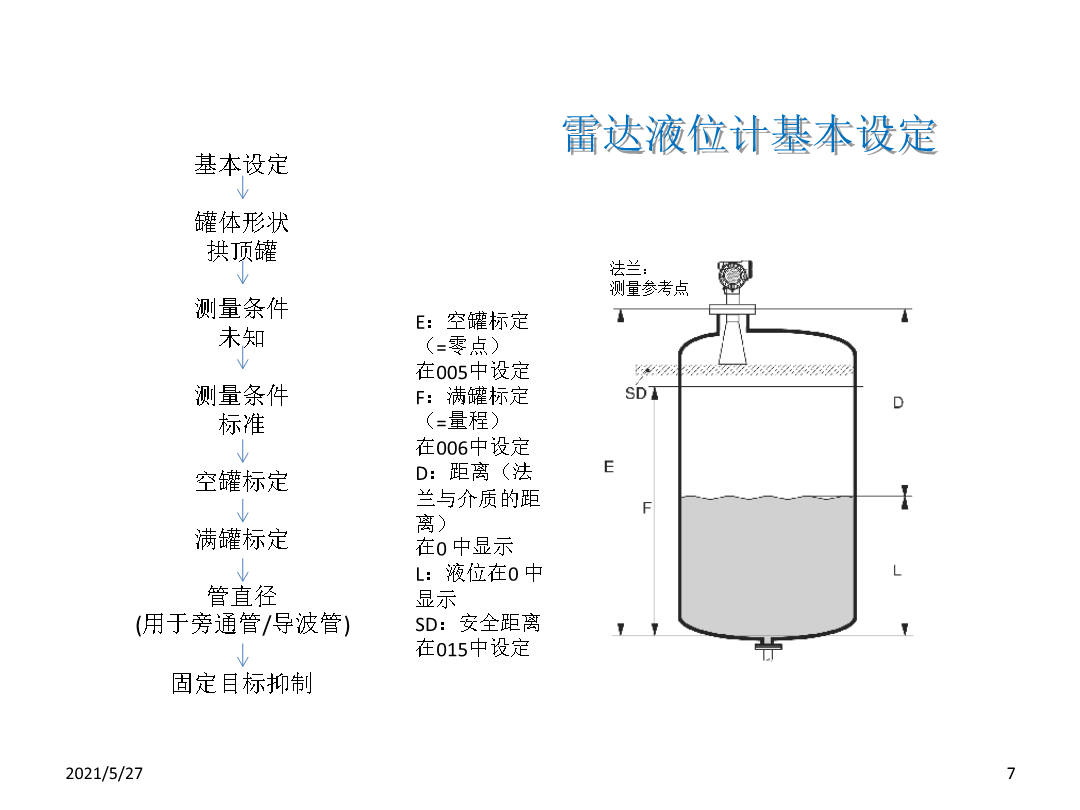
..雷达液位计的工作原理雷达液位计的工作原理发射—反射—接收是雷达液位计的根本工作原理。雷达传感器的天线以波束的形式发射电磁波信号,发射波在被测物料外表产生反射,反射回来的回波信号仍由天线接收。发射及反射波束中的每一点都采用超声采样的方法进展采集。信号经智能处理器处理后得出介质与探头之间的距离,送终端显示器进展显示、报警、操作等。微波测距示意图如图1所示。图中,E-空槽〔罐〕的高度;F—满槽〔罐〕的高度;D—探头至介质外表的距离;L—实际物位雷达脉冲信号从发射到接收的运行时间与探头到介质外表的距离D成正比

超声波雷达液位计.ppt
超声波/雷达液位计测量原理及应用——刘海泉2008年3月10日一、概述A、雷达物位计1)、原理大多数经济型的微波物位计都采用5.8GHz或6.3GHz的微波频率,其辐射角较大(约30o),容易在容器壁或内部构件上产生干扰回波。虽然加大喇叭天线尺寸可稍减少发射角度,但体积增大,使用不便,而且改善有限。有的公司采用更高频率的微波物位计,如Siemens公司的LR400(24GHz)及Vega公司的VegaPuls40系列(26GHz)。当采用4"喇叭天线时辐射角约8o,而同样的天线采用5.8GHz的频率时,则