
基于proteus步进电机控制系统的设计-学位论文.doc

胜利****实阿


1/10

2/10
3/10

4/10
5/10

6/10
7/10
8/10
9/10
10/10
亲,该文档总共41页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于proteus步进电机控制系统的设计-学位论文.doc
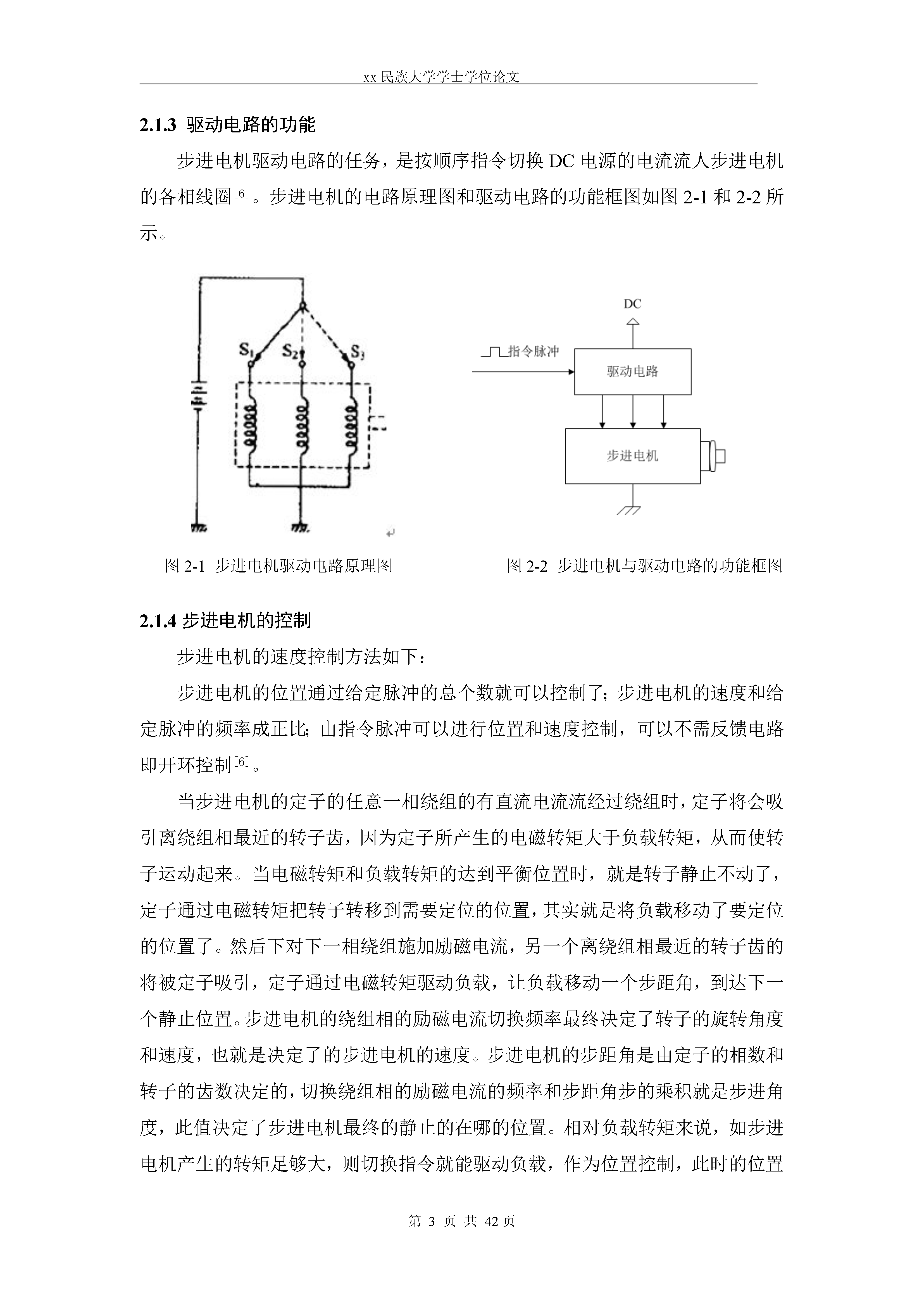
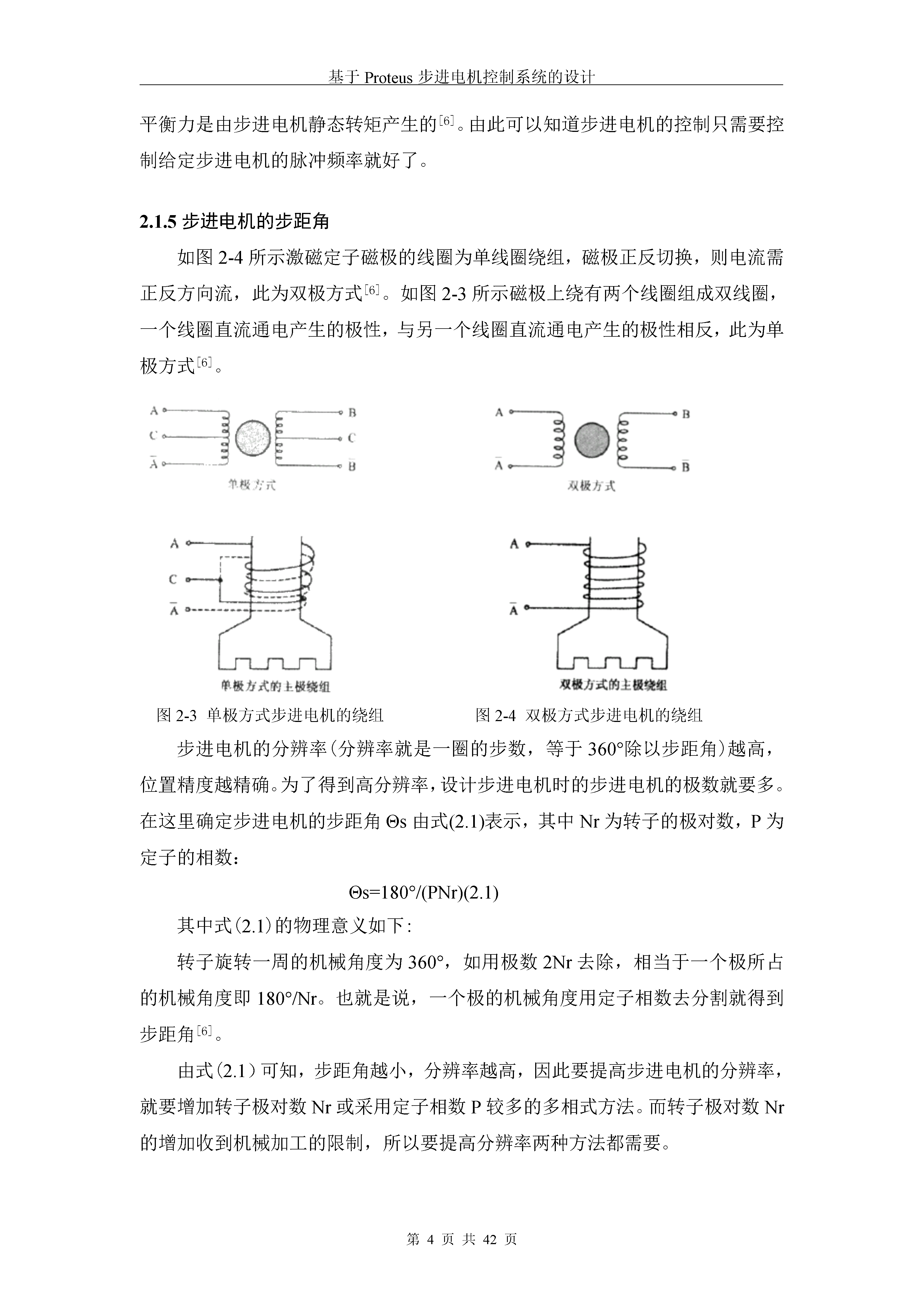
北方民族大学学士学位论文1xx民族大学学士学位论文论文题目:基于Proteus步进电机控制系统的设计院(部)名称:电气信息工程学院学生姓名:专业:自动化学号:指导教师姓名:论文提交时间:2014年5月20日论文答辩时间:2014年5月25日学位授予时间:xx民族大学教务处制摘要本文提出了一种基于Proteus步进电机单闭环控制的仿真方法。首先,论述了控制步进电机停止、正反转、加减速、显示、键盘输入、L297和L298的驱动电路等各个模块的组成;其次,在这些模块的功能基础上,提出了设计思路,采用AT89C5

基于Proteus步进电机控制系统的设计大学学士学位论文.doc
北方民族大学学士学位论文xx民族大学学士学位论文论文题目:基于Proteus步进电机控制系统的设计院(部)名称:电气信息工程学院学生姓名:专业:自动化学号:指导教师姓名:论文提交时间:2014年5月20日论文答辩时间:2014年5月25日学位授予时间:xx民族大学教务处制摘要本文提出了一种基于Proteus步进电机单闭环控制的仿真方法。首先,论述了控制步进电机停止、正反转、加减速、显示、键盘输入、L297和L298的驱动电路等各个模块的组成;其次,在这些模块的功能基础上,提出了设计思路,采用AT89C52

学位论文—基于proteus的步进电机电机仿真-实验设计论文报告.doc
基于单片机的步进电机的驱动实验设计报告系别电子通信工程系组别第十组专业名称电子信息工程指导教师组内成员基于proteus的步进电机电机仿真摘要:步进电机广泛应用在生产实践的各个领域。它最大的应用是在数控机床的制造中,因为步进电机不需要A/D转换,能够直接将数字脉冲信号转化成为角位移,所以被认为是理想的数控机床的执行元件。本设计利用proteus仿真软件进行电路仿真,系统通过设置四个按键分别控制不进电机的起止、圈数、方向、不进速度,使用1602液晶显示以上参数。整个系统具有稳定性好,实用性强,操作界面友好等
学位论文—基于proteus的步进电机电机仿真-实验设计论文报告.doc
基于单片机的步进电机的驱动实验设计报告系别电子通信工程系组别第十组专业名称电子信息工程指导教师组内成员基于proteus的步进电机电机仿真摘要:步进电机广泛应用在生产实践的各个领域。它最大的应用是在数控机床的制造中,因为步进电机不需要A/D转换,能够直接将数字脉冲信号转化成为角位移,所以被认为是理想的数控机床的执行元件。本设计利用proteus仿真软件进行电路仿真,系统通过设置四个按键分别控制不进电机的起止、圈数、方向、不进速度,使用1602液晶显示以上参数。整个系统具有稳定性好,实用性强,操作界面友好等

学位论文—基于proteus的步进电机电机仿真-实验设计论文报告.doc
基于单片机的步进电机的驱动实验设计报告系别电子通信工程系组别第十组专业名称电子信息工程指导教师组内成员基于proteus的步进电机电机仿真摘要:步进电机广泛应用在生产实践的各个领域。它最大的应用是在数控机床的制造中,因为步进电机不需要A/D转换,能够直接将数字脉冲信号转化成为角位移,所以被认为是理想的数控机床的执行元件。本设计利用proteus仿真软件进行电路仿真,系统通过设置四个按键分别控制不进电机的起止、圈数、方向、不进速度,使用1602液晶显示以上参数。整个系统具有稳定性好,实用性强,操作界面友好等