
课程设计--洗瓶机的推瓶机构.doc

胜利****实阿


1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
课程设计--洗瓶机的推瓶机构.doc
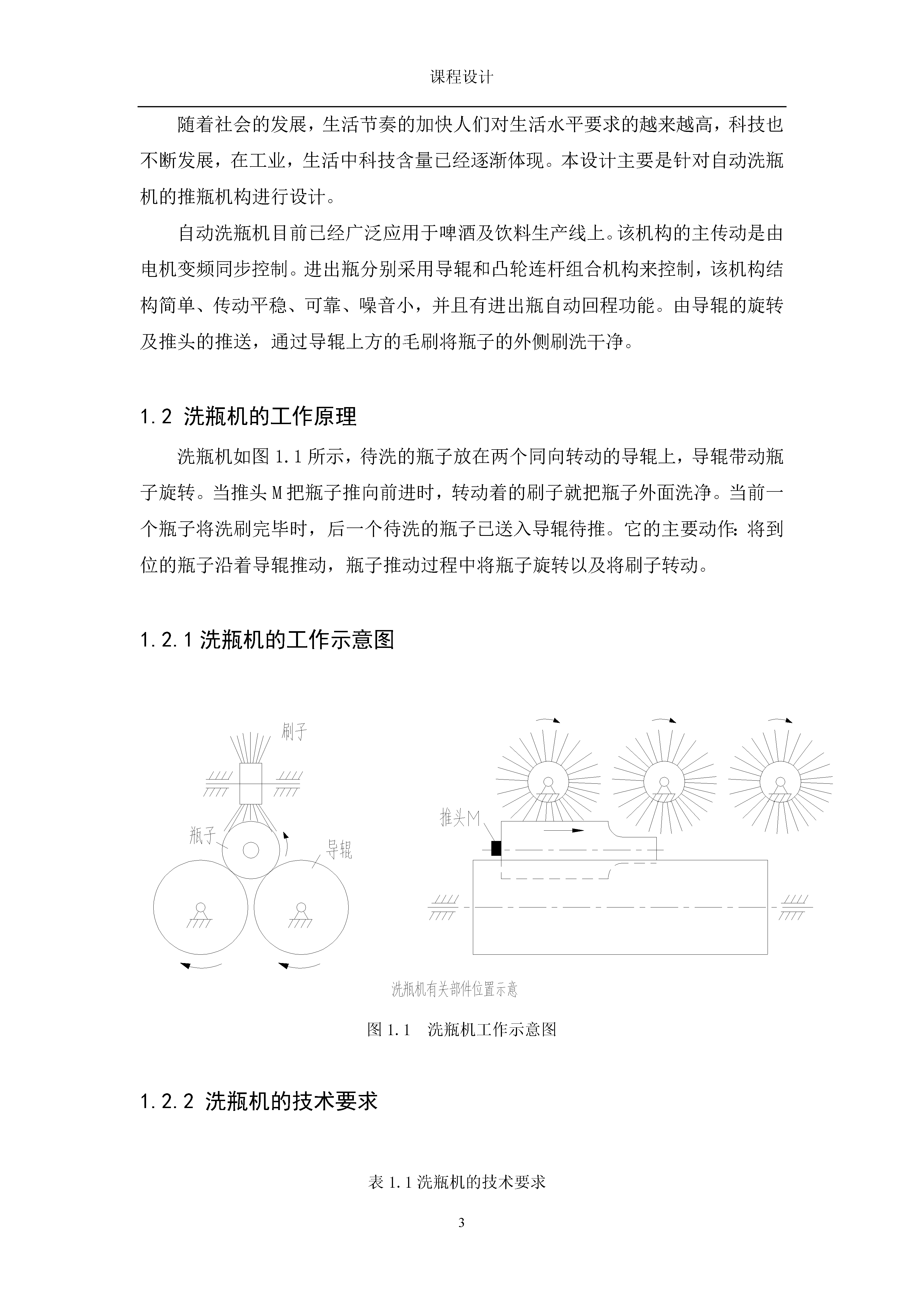
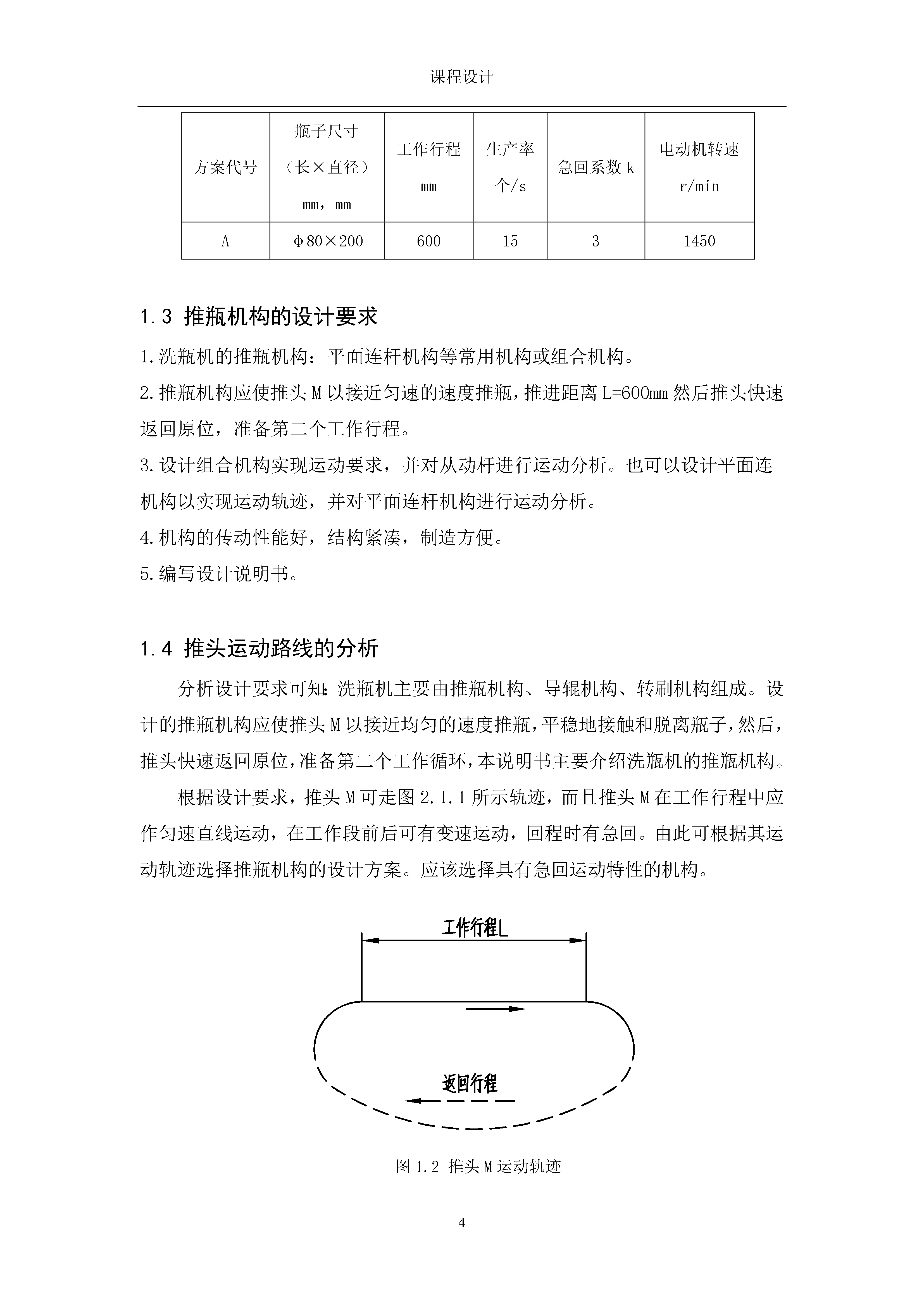
课程设计15《课程设计》任务书班级:0213413小组成员:丁智、郎跃军、黄桂连课程设计题目:洗瓶机的推瓶机构课程设计完成内容:设计说明书一份(主要包括:运动方案设计、方案的决策与尺度综合、必要的机构运动分析和相关的机构运动简图)完成日期:2015年01月13日指导教师:范奎目录1.设计题目31.1洗瓶机的主要功能介绍31.2洗瓶机的工作原理31.2.1洗瓶机的工作示意图31.2.2洗瓶机的技术要求41.3推瓶机构的设计要求31.4推头运动路线的分析52.方案的设计及分析决策62.1凸轮连杆组合方案62.

机械原理课程设计洗瓶机的推瓶机构.doc
机械原理课程设计说明书设计题目洗瓶机的推瓶机构设计者周凡指导老师李鹏南学院机电工程学院专业材料成型及控制工程班级二班2010年12月30日摘要进入21世纪以来,市场愈加需要各种各样性能优良、质量可靠、价格低廉、效率高、能耗低的机械产品,而决定产品性能、质量、水平、市场竞争能力和经济效益的重要环节是产品设计。机械产品设计是首要任务是进行机械运动方案的设计和构思、各种传动机构和执行机构的选用和创新设计,这就要求设计者能够综合应用各类典型机构的结构组成、运动原理、工作特点、设计方法及其在系统中的作用等知识,根据
洗瓶机推瓶机构设计---机械.doc
目录摘要1ABSTRACT2第1章前言3第2章洗瓶机推瓶机构原理及运动分析52.1推瓶机构的功能原理及工作原理52.1.1功能原理62.1.2工作原理72.2推瓶机构工艺动作分析及工作循环图7第3章系统总体方案设计83.1系统运动方案构思83.2方案的评定及选择最优方案103.2.1方案的评定103.2.2方案选择10第4章凸轮及铰链四杆机构的设计114.1凸轮的设计114.1.1凸轮基本参数设计114.1.2凸轮的建模144.2铰链四杆机构的设计154.2.1铰链四杆机构尺寸设计154.3凸轮铰链四杆机

机械原理洗瓶机推瓶机构设计.doc
学校机械原理课程设计推瓶机构设计学院机电工程学院专业机械设计制造及其自动化学号姓名任课教师目录设计题目及要求……………………………………3原始数据要求………………………………………4设计方案对比拟定…………………………………4机构运动简图……………………………………….5运动尺寸设计……………………………………….6系统功能图…………………………………………..8推瓶机构图(附图)…….…………………………..8八、参考文献….……………….………………………….8设计题目及要求(一)、功能要求及工艺动作
机械原理洗瓶机推瓶机构设计.doc
学校机械原理课程设计推瓶机构设计学院机电工程学院专业机械设计制造及其自动化学号姓名任课教师目录设计题目及要求……………………………………3原始数据要求………………………………………4设计方案对比拟定…………………………………4机构运动简图……………………………………….5运动尺寸设计……………………………………….6系统功能图…………………………………………..8推瓶机构图(附图)…….…………………………..8八、参考文献….……………….………………………….8设计题目及要求(一)、功能要求及工艺动作