
飞思卡尔智能车硬件培训.ppt

诗文****仙女

1/10
2/10
3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共64页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

飞思卡尔智能车硬件培训.ppt
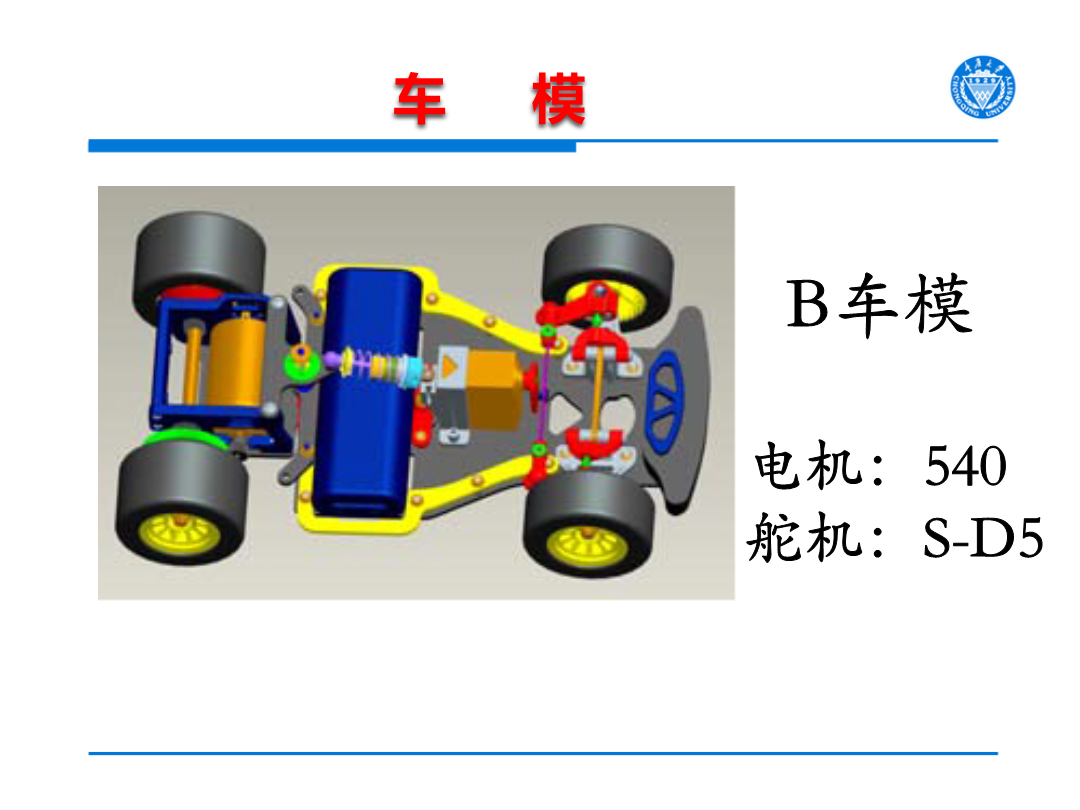
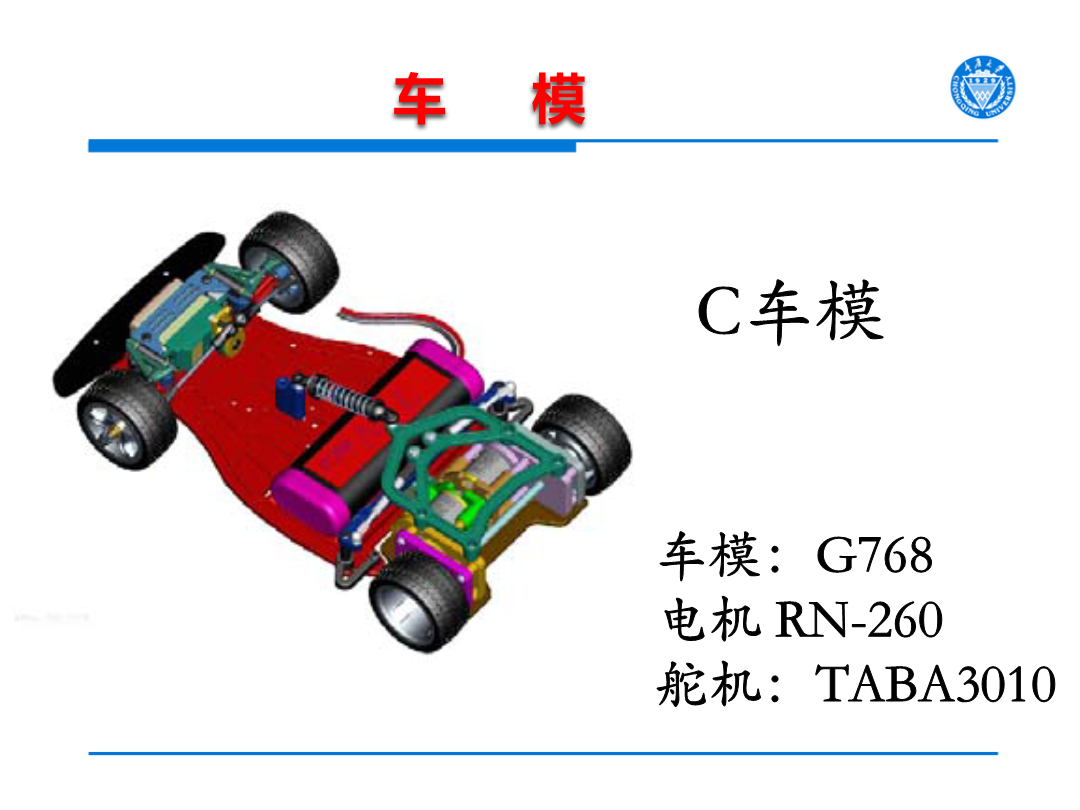
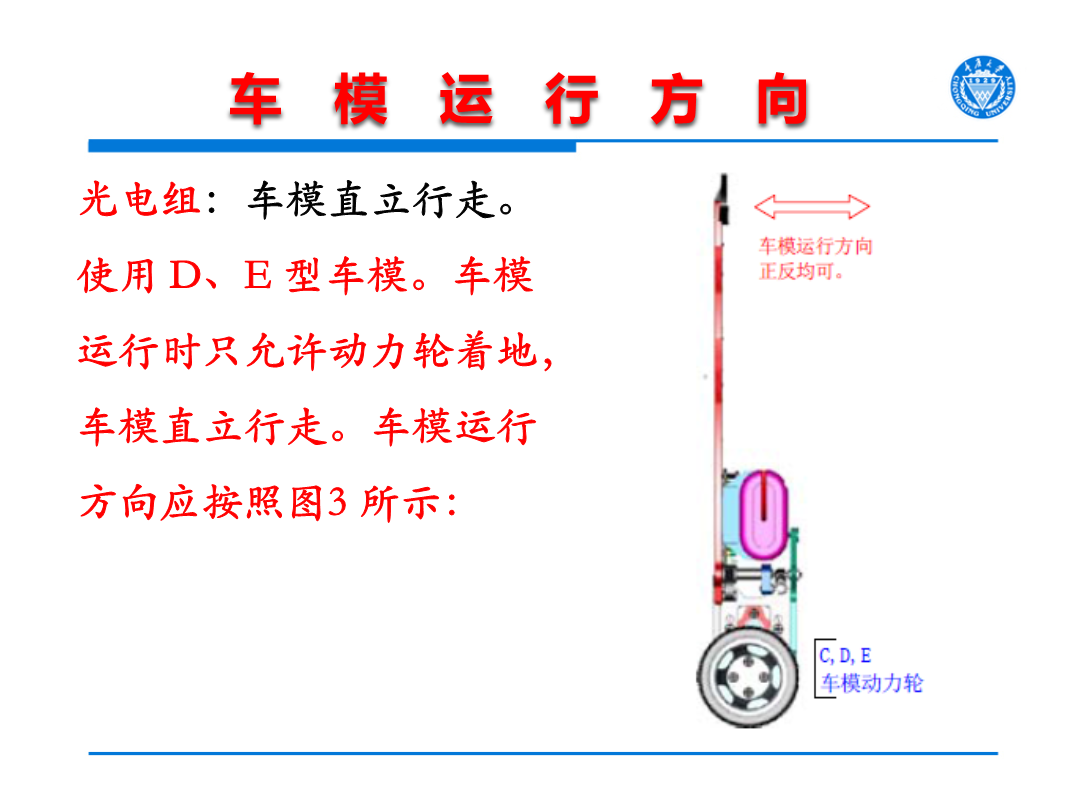
2013-10-30车模车模车模车模电磁组:四轮车模双向运行。车模使用C型车模车模运行方向允许双向运行。光电组:四轮车模双向运行。车模使用B型车模车模运行可以在比赛过程中根据赛道要求随时调整运行方向。光电组:车模直立行走。使用D、E型车模。车模运行时只允许动力轮着地车模直立行走。车模运行方向应按照图3所示:车模改装规则车模改装规则车模调整参

飞思卡尔智能车培训之硬件篇.ppt
飞思卡尔智能车培训之硬件篇智能车的整体认知硬件框图主控模块和传感器关于舵机驱动关于舵机驱动标准驱动模型实测波形(0度)实测波形(15度)实测波形(30度)实测波形(-15度)转角与脉宽脉宽与转角电机驱动电机驱动电机驱动电机驱动电机驱动——NMOS方案电机驱动——BTN7971半桥电机驱动——BTN7971方案电机驱动——驱动隔离电机驱动——驱动隔离电机驱动——驱动隔离电机测速电池电源管理——电池使用注意事项三端线性稳压LM2940-5.0三端线性稳压LM1117-3.3开关电源LM2596-5.0ADJ可

飞思卡尔智能车竞赛培训教程.ppt
智能车竞赛专题培训赛车的意义汽车及车模简介电池使用方法赛道及比赛规则研究项目介绍关于电机驱动关于舵机驱动关于赛道检测方式最佳路线问题飞斯卡尔单片机介绍软硬件设计注意事项工程化方法与团队精神答疑时间赛车的意义汽车及车模简介电池使用方法电池使用方法电池使用方法赛道及比赛规则赛道及比赛规则研究项目介绍模型车电机特性一、电机特性一、电机特性一、电机特性一、电机特性二、MC33886芯片二、MC33886芯片二、MC33886芯片二、MC33886芯片二、MC33886芯片二、MC33886芯片二、MC33886芯

学做智能车挑战飞思卡尔之2硬件.pptx
会计学2.1传感器系统(xìtǒng)2.1传感器系统(xìtǒng)2.1传感器系统(xìtǒng)2.1传感器系统(xìtǒng)2.1.1光电式传感器2.1.1光电式传感器2.1.1光电式传感器2.1.1光电式传感器2.1.1光电式传感器2.1.1光电式传感器2.1.2图像(túxiànɡ)传感器2.1.2图像(túxiànɡ)传感器2.1.2图像(túxiànɡ)传感器2.1.2图像(túxiànɡ)传感器2.1.2图像(túxiànɡ)传感器2.1.2图像(túxiànɡ)传感器2.1.2图像(

飞思卡尔智能车简介.docx
智能车制作FREESCALE学院:信息工程学院班级:电气工程及其自动化132学号:6101113078姓名:李瑞欣目录:1.整体概述2.单片机介绍3.C语言4.智能车队的三个组5.我对这门课的建议一、整体概述智能车的制作过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学生组成团队,协同工作。内容涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等多学科多专业。下面是一个智能车的模块分布:总的来说智能车有六大模块:信号输入模块、控制输出模块、数据处理模块、信息显示模块、信息发送模块、