
红外成像光谱仪及其对快速移动目标的超光谱成像方法.pdf

是向****23


1/10
2/10

3/10

4/10
5/10

6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

红外成像光谱仪及其对快速移动目标的超光谱成像方法.pdf
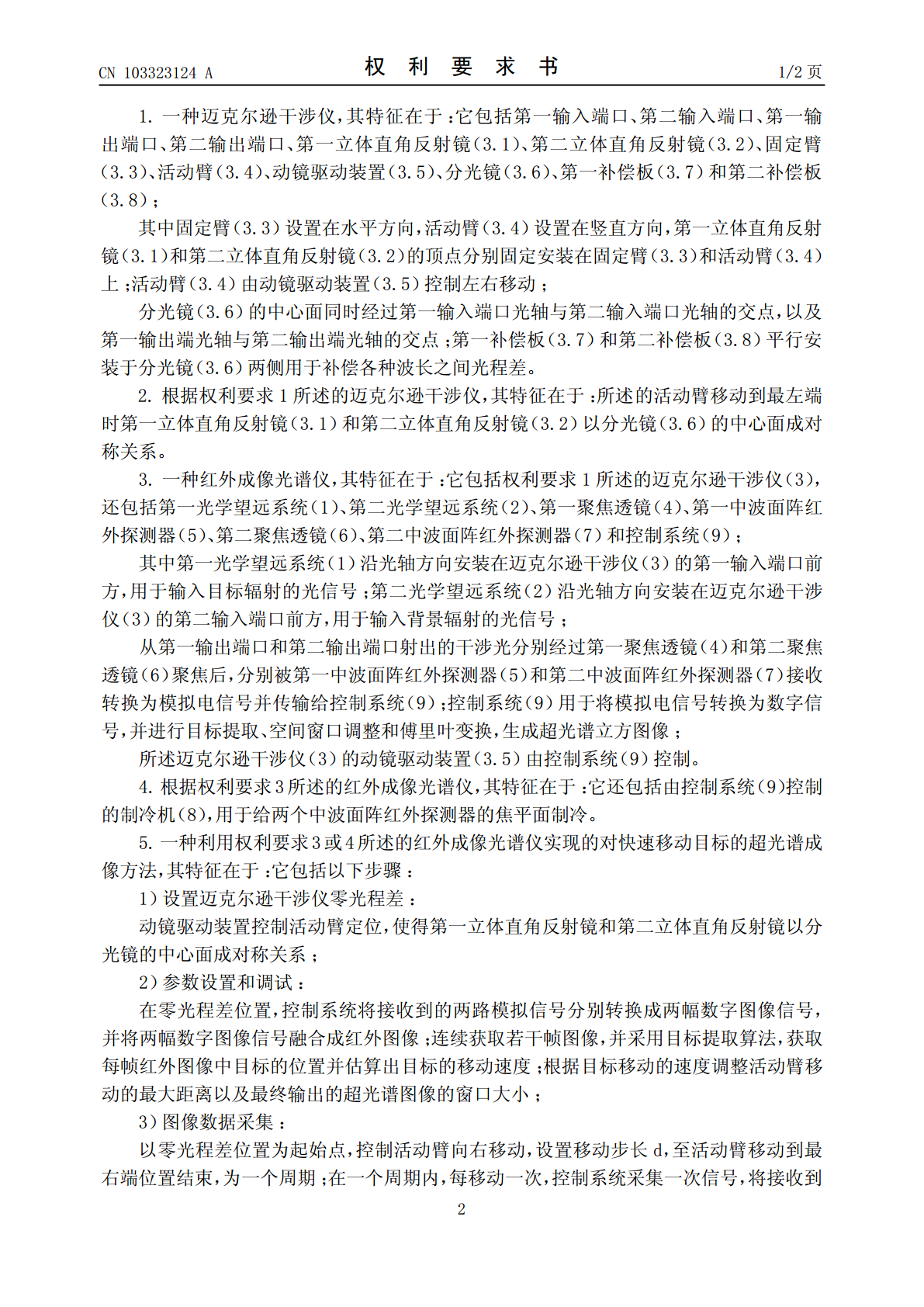
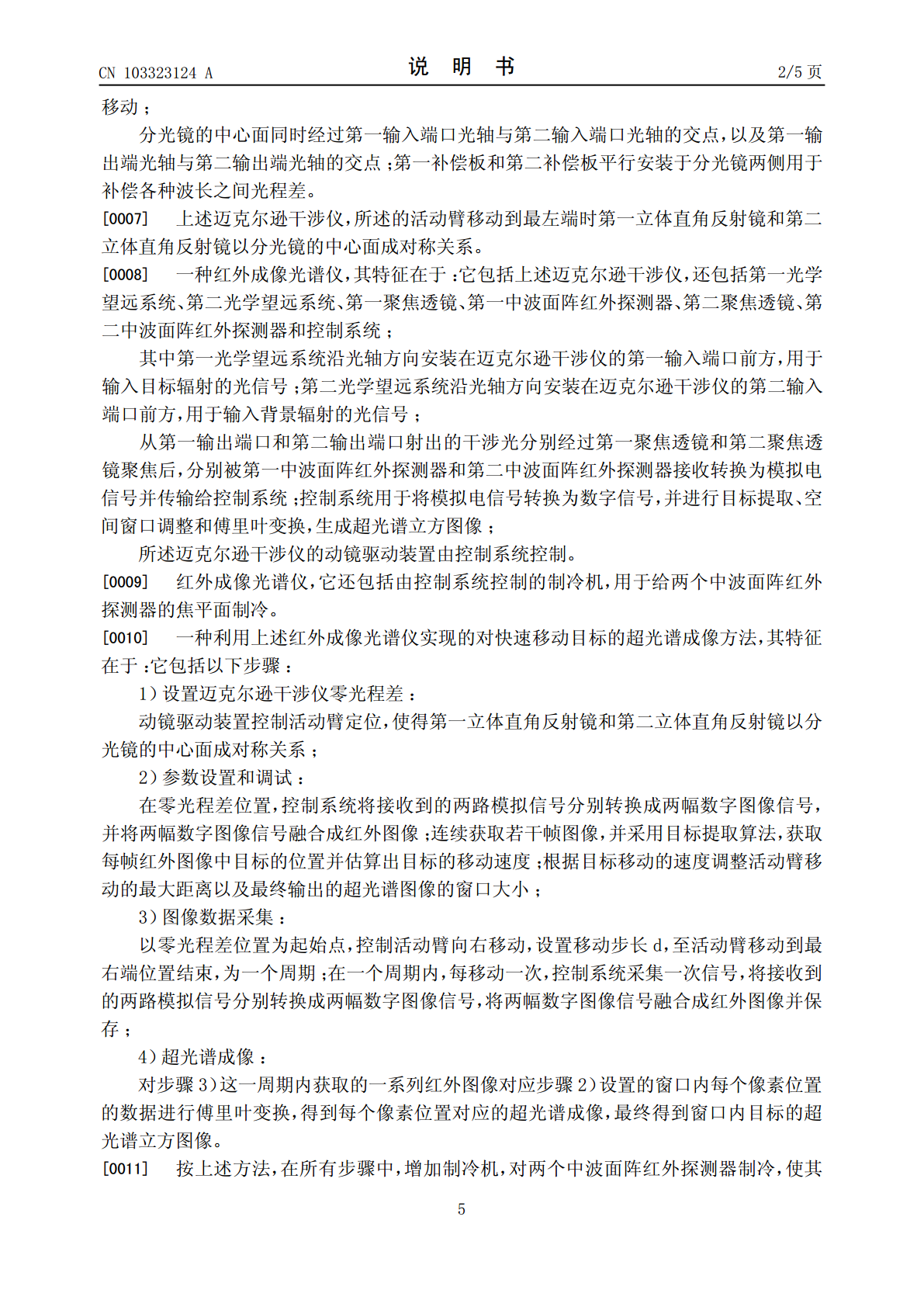
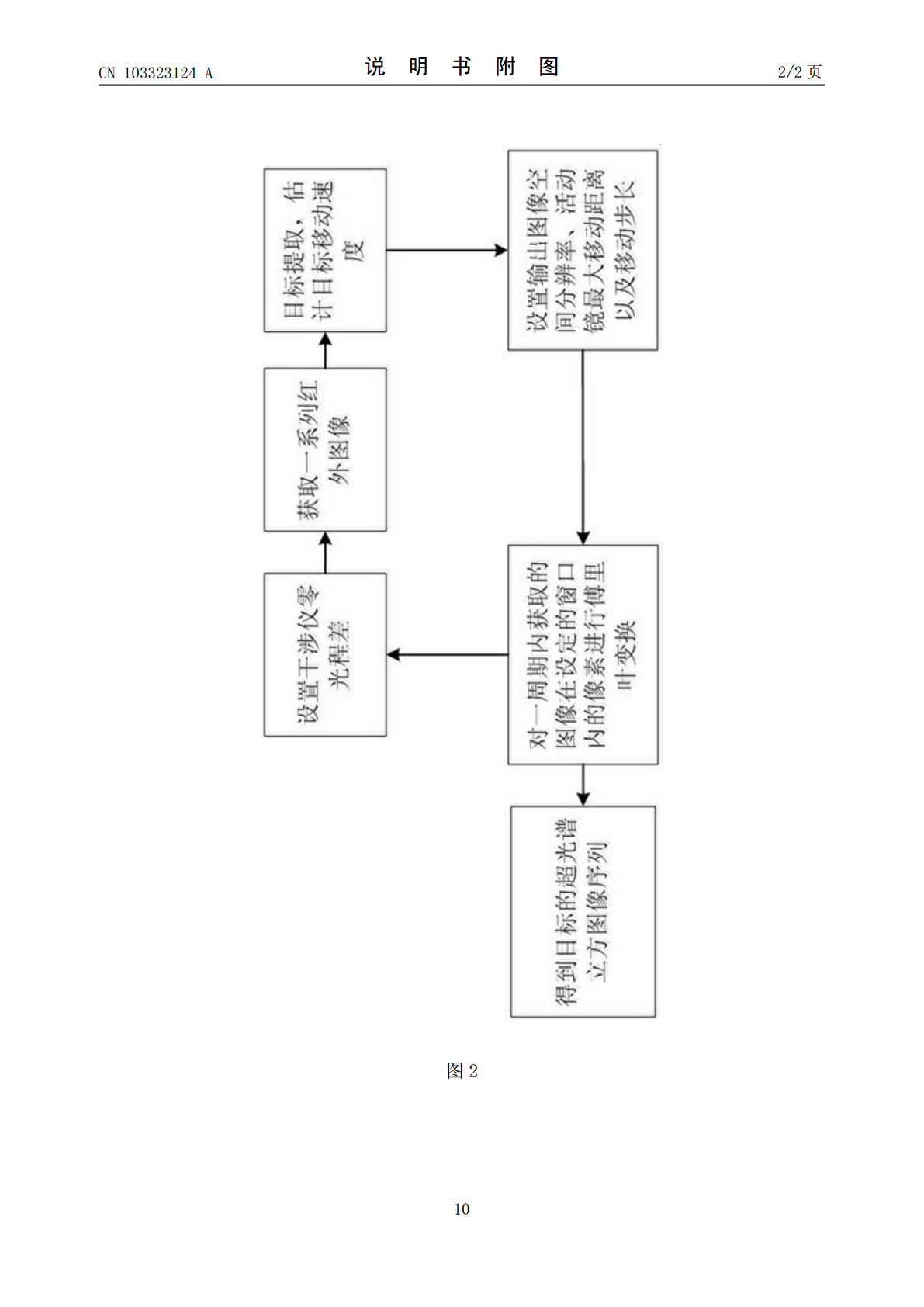
本发明提供一种红外成像光谱仪及其对快速移动目标的超光谱成像方法,包括特殊结构的迈克尔逊干涉仪、第一光学望远系统、第二光学望远系统、第一聚焦透镜、第一中波面阵红外探测器、第二聚焦透镜、第二中波面阵红外探测器和控制系统;第一、第二光学望远系统分别沿光轴方向安装在迈克尔逊干涉仪的第一、第二输入端口前方;从第一、第二输出端口射出的干涉光分别经过第一聚焦透镜和第二聚焦透镜聚焦后,分别被第一中波面阵红外探测器和第二中波面阵红外探测器接收转换为模拟电信号并传输给控制系统;控制系统用于将模拟电信号转换为数字信号,并进行目

基于光谱吸收靶标的成像光谱仪光谱定标方法研究.docx
基于光谱吸收靶标的成像光谱仪光谱定标方法研究随着科技的不断发展,光谱定标方法的研究越来越受到人们的关注。其中,成像光谱仪是一种能够同时获得多波长光谱数据和图像信息的先进仪器,广泛应用于红外、紫外、可见光等领域。本文将针对成像光谱仪的光谱定标方法展开研究,主要采用基于光谱吸收靶标的方法进行研究,探讨该方法的优缺点及应用现状。一、光谱吸收靶标的概念光谱吸收靶标是一种可在多个波长处发生可见光吸收的化学物质,其存在可以检测、标定、校正成像光谱仪的波长刻度。通常采用的光谱吸收靶标是具有明显吸收峰的化合物,如馏出油、
一种移动式宽波段傅里叶变换红外成像光谱仪.pdf
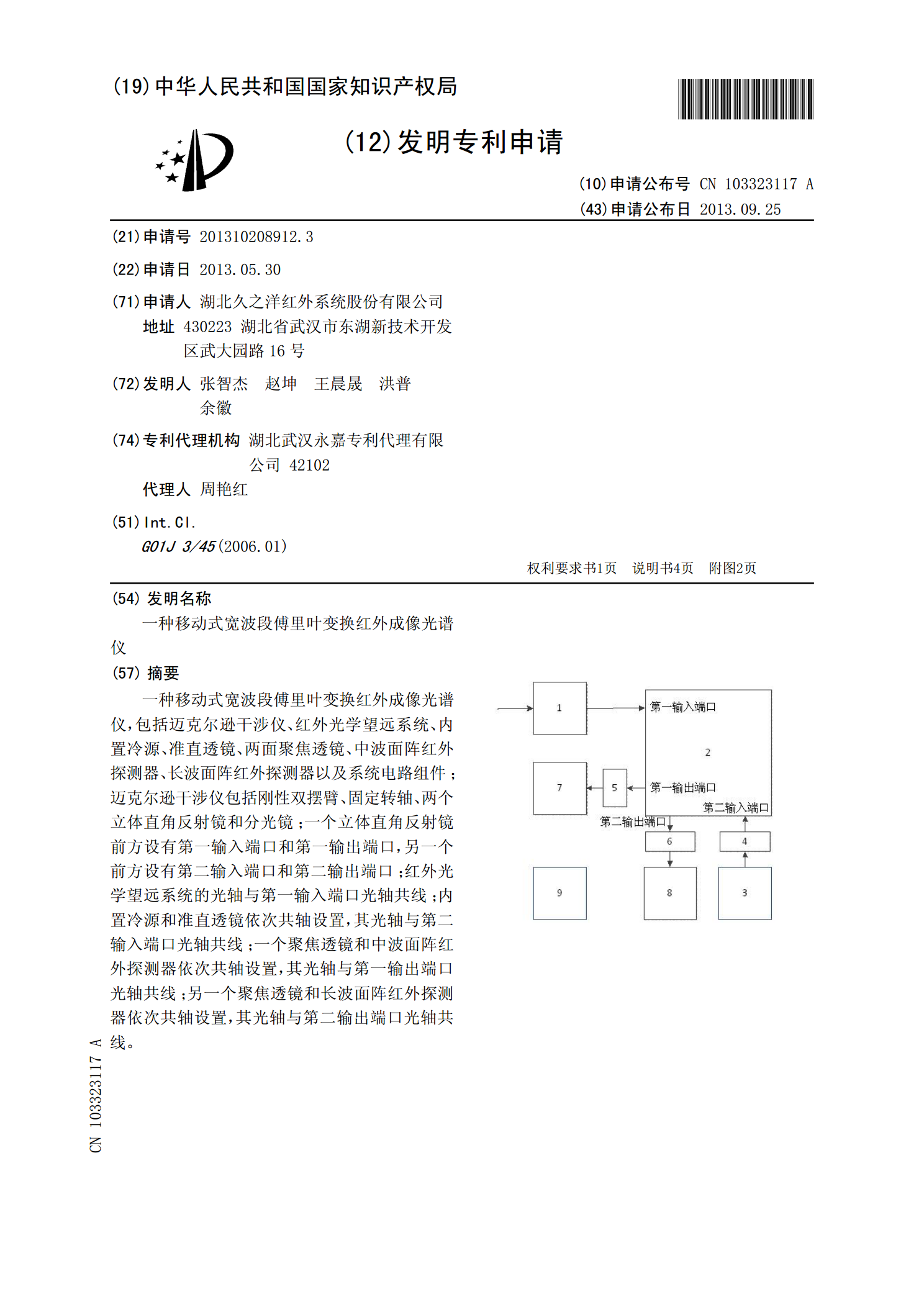
一种移动式宽波段傅里叶变换红外成像光谱仪,包括迈克尔逊干涉仪、红外光学望远系统、内置冷源、准直透镜、两面聚焦透镜、中波面阵红外探测器、长波面阵红外探测器以及系统电路组件;迈克尔逊干涉仪包括刚性双摆臂、固定转轴、两个立体直角反射镜和分光镜;一个立体直角反射镜前方设有第一输入端口和第一输出端口,另一个前方设有第二输入端口和第二输出端口;红外光学望远系统的光轴与第一输入端口光轴共线;内置冷源和准直透镜依次共轴设置,其光轴与第二输入端口光轴共线;一个聚焦透镜和中波面阵红外探测器依次共轴设置,其光轴与第一输出端口光

一种并行压缩感知计算层析成像光谱仪及其成像光谱重建方法.pdf
本发明涉及成像技术领域,特别涉及一种并行压缩感知计算层析成像光谱仪及其成像光谱重建方法。所述光谱仪包括:视场成像组件、第一空间光调制器、第二空间光调制器、会聚收光部件、色散组件、色散投影成像透镜、光电阵列探测器、数据包存储器、光源组件、第一随机数发生器、第二随机数发生器、第一信号同步控制模块、第二信号同步控制模块、系统标定矩阵处理模块、高分辨色散投影压缩感知模块和计算层析成像光谱重建模块。本发明提供的光谱仪及其成像光谱重建方法,使用常规探测器对目标色散投影图像进行分块并行压缩测量,通过压缩感知重建算法从低

消谱线弯曲长波红外成像光谱仪器的研究.docx
消谱线弯曲长波红外成像光谱仪器的研究近年来,随着红外成像技术的飞速发展,在红外物像转换领域,涌现了许多高性能的成像光谱仪器。其中,消谱线弯曲长波红外成像光谱仪器(以下简称弯曲长波光谱仪)是一种具有广泛应用前景的新型仪器,其研究值得深入探讨。弯曲长波光谱仪是在传统消光比法基础上发展而来的。消光比法在确定样品物质存在时已有广泛应用,但其仅能获得样品的宽谱段比值,无法得知样品内部分色现象和细小化合物的数量。而弯曲长波光谱仪则采用消谱线和弯曲长波结合的方式,跳出消光比法的束缚,既能获得基础物理数据,又能进行微小结