
带相移的永磁同步电机同轴驱动系统.pdf

志信****pp

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

带相移的永磁同步电机同轴驱动系统.pdf
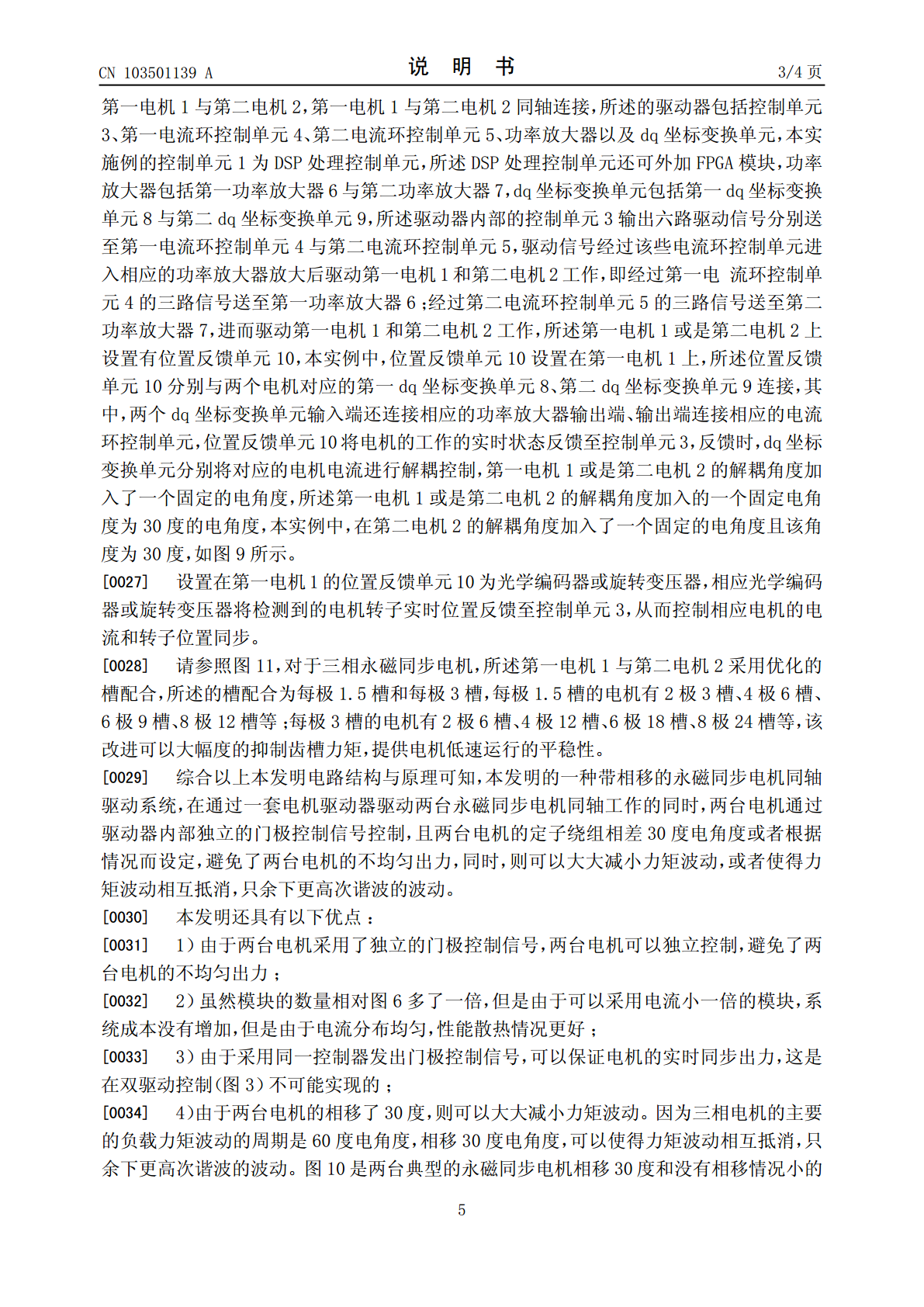
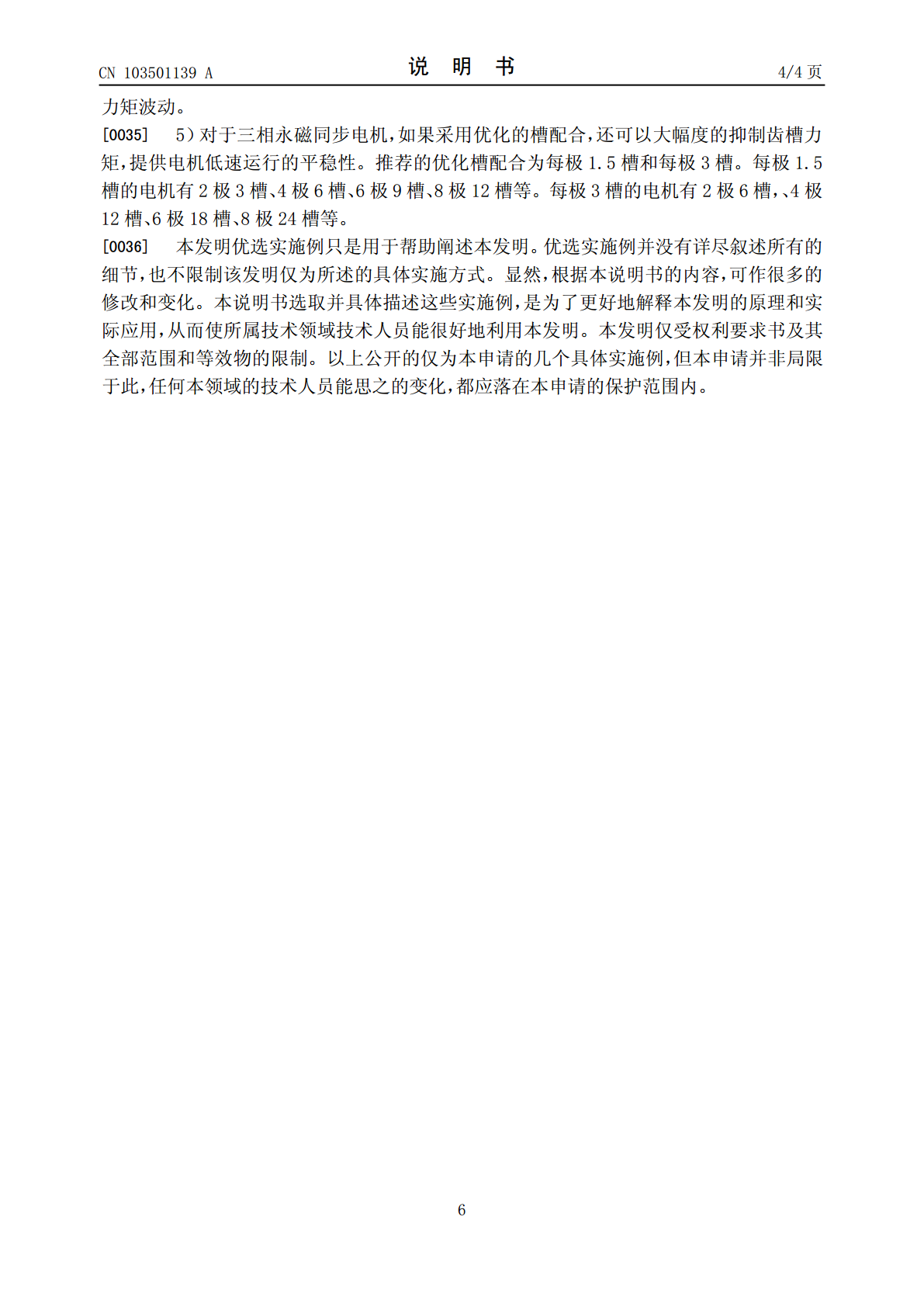
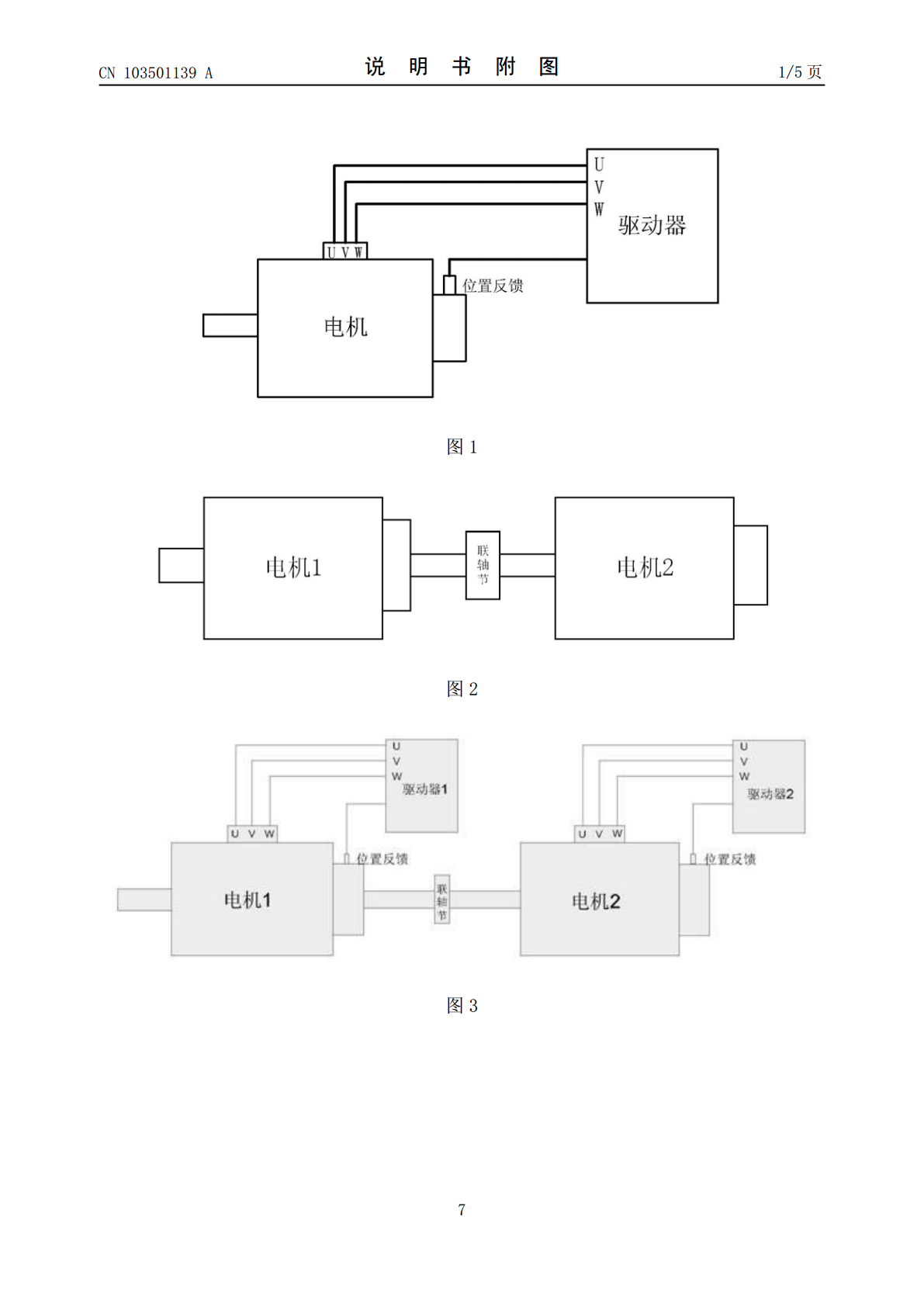
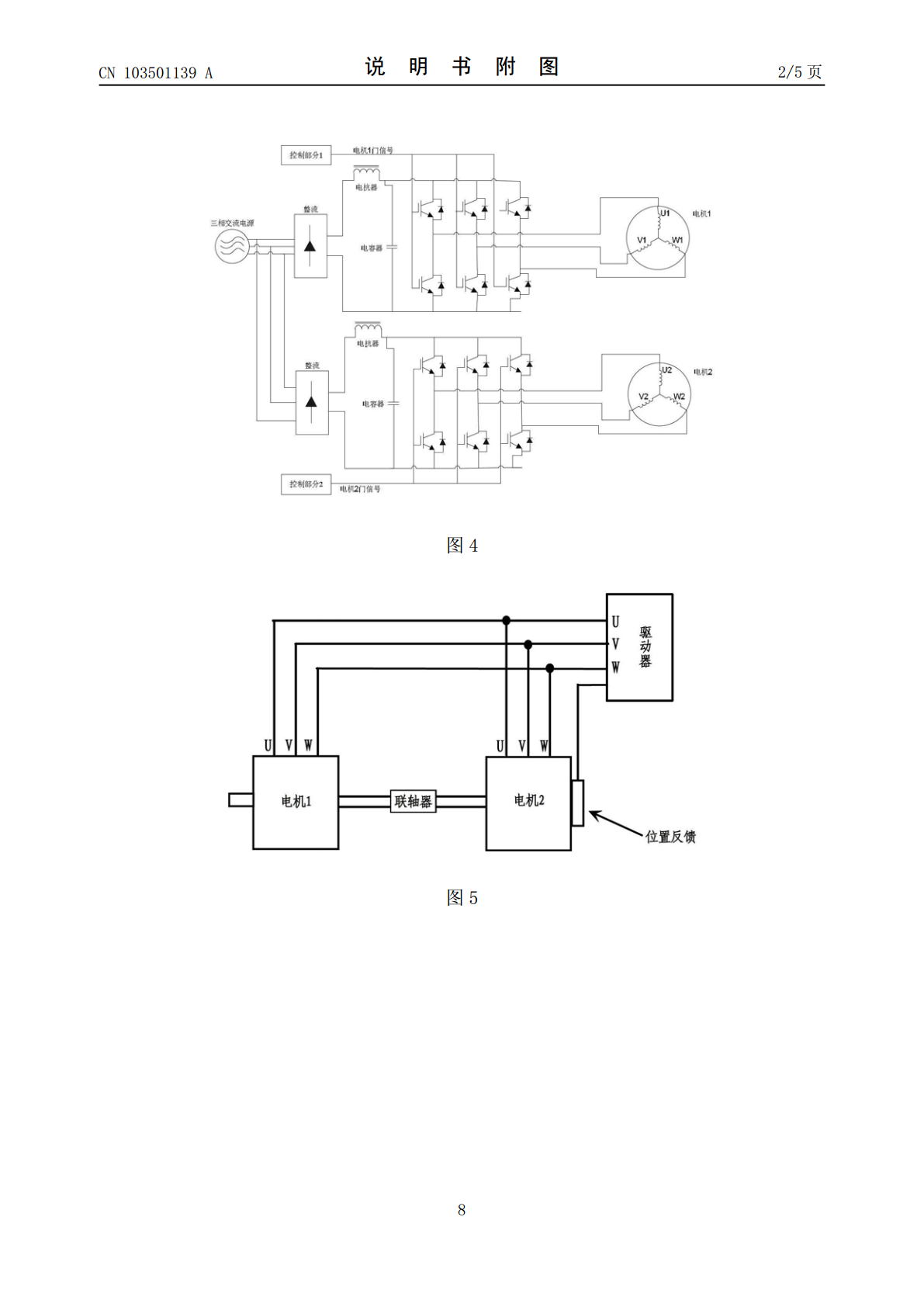
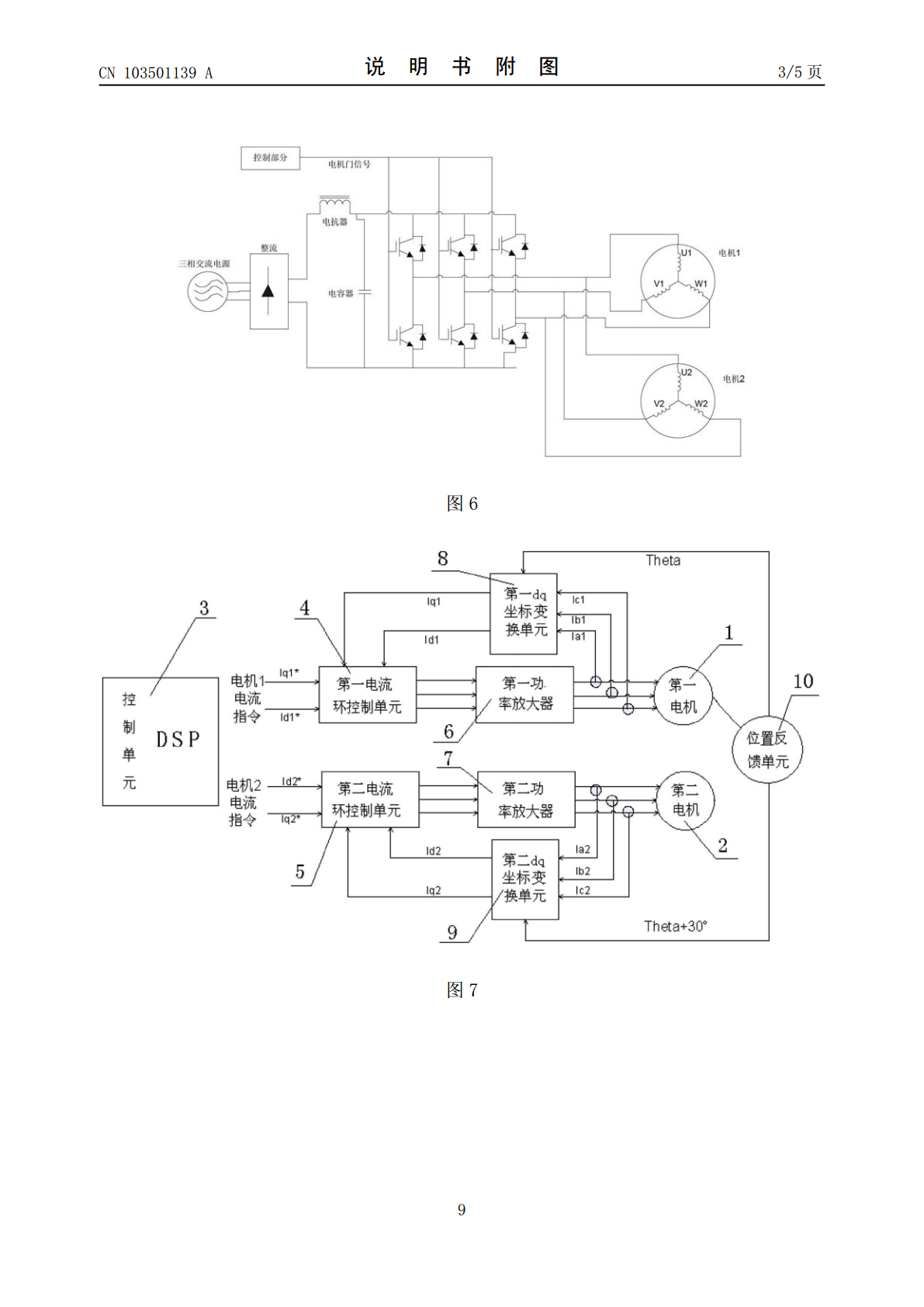
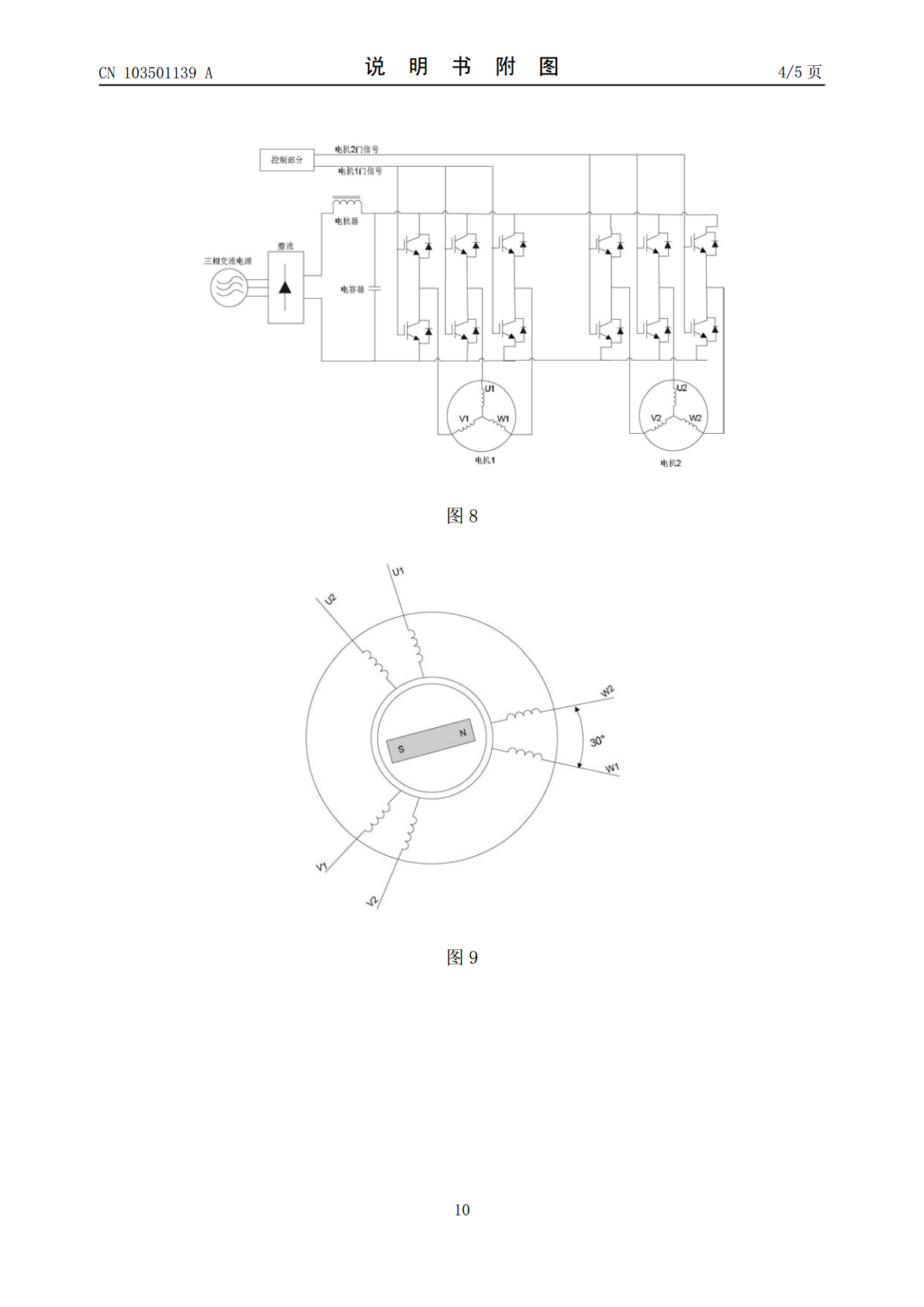
本发明公开了一种带相移的永磁同步电机同轴驱动系统,提出了一种新的控制模式,驱动器分别控制两台永磁同步电机,同时,两台电机在安装以后,第一电机的定子绕组和转子的相对角度,和第二电机的定子绕组和转子的相对角度成一个固定的30度电角度的位置差,就是如果两台电机的转子角度完全对称的话,两台电机的定子绕组相差30度电角度。在控制时,采用dq轴矢量控制的模式,对两台电机的电流分别进行解耦控制,在解耦的时候,第二电机的解耦角度需要加30度电角度;以及两台电机通过驱动器内部独立的门极控制信号控制,避免了两台电机的不均匀出

永磁同步电机驱动系统主控芯片研究与设计.docx
永磁同步电机驱动系统主控芯片研究与设计永磁同步电机(PermanentMagnetSynchronousMotor,PMSM)是一种高效、高扭矩密度和高控制精度的电动机,由于其具有快速响应、高能效和较低的机械损耗等优点,被广泛应用于各种工业和交通领域。而永磁同步电机驱动系统主控芯片在永磁同步电机的驱动过程中起到了至关重要的作用。本论文将对永磁同步电机驱动系统主控芯片进行研究与设计。首先,论文将介绍永磁同步电机的工作原理和特点。永磁同步电机通过将永磁体固定于转子上,与固定在定子上的电磁感应绕组相互作用,实现

永磁同步电机伺服控制与驱动系统设计与分析.docx
永磁同步电机伺服控制与驱动系统设计与分析随着社会经济的不断发展和各种新技术的不断涌现,永磁同步电机作为一种新型电机,具有体积小、功率大、效率高等优势,在工业生产中得到了广泛的应用。然而,永磁同步电机的控制和驱动技术也变得越来越重要,因为它们直接影响到电机的性能和效率。因此,本文就对永磁同步电机的伺服控制与驱动系统设计与分析进行了详细的探讨。一、永磁同步电机的特点永磁同步电机作为一种新型电机,其特点主要有以下几点:1.高效性能:由于电机采用了永磁材料,因此具有较高的磁通密度和能量积。同时,电机的谐波失真较小

永磁同步电机驱动控制系统设计与实现.docx
永磁同步电机驱动控制系统设计与实现永磁同步电机驱动控制系统设计与实现摘要:随着现代交通工具和工业设备对低噪音、高效能的要求不断增加,永磁同步电机因其高效能和高控制性被广泛应用。本文以永磁同步电机驱动控制系统设计与实现为课题,首先介绍永磁同步电机的基本原理和特点,然后详细讨论了永磁同步电机驱动系统的设计与实现过程,包括传感器配置、速度闭环控制和电流闭环控制等方面,最后通过实验验证了设计的可行性和有效性。关键词:永磁同步电机,驱动控制系统,传感器配置,闭环控制1.引言随着电力电子技术的快速发展,永磁同步电机(

汽车EPS系统永磁同步电机驱动与程序的设计研究.docx
汽车EPS系统永磁同步电机驱动与程序的设计研究随着现代汽车技术的不断发展,EPS电力助力转向系统逐渐成为现代汽车趋势。其中,永磁同步电机作为EPS系统的动力源之一,取代了传统的液压助力转向,其优点在于响应速度快、效率高、噪音低、节能环保等。本文旨在对汽车EPS系统永磁同步电机驱动与程序的设计进行探讨。一、永磁同步电机驱动原理永磁同步电机是一种典型的同步电机,其转子上嵌入磁钢永久磁体作为转矩源。在这种电机运转时,转子磁极与定子磁场同步旋转,因此称其为同步电机。除此之外,永磁同步电机具有响应时间快、转速范围宽