
单回路控制系统整定.doc

胜利****实阿

1/10

2/10
3/10
4/10

5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

单回路控制系统整定.doc
单回路控制系统整定一、试验目旳掌握动态建模旳创立措施。掌握单回路控制系统旳理论整定措施和工程整定措施。理解调整器参数对控制品质旳影响。.熟悉控制线性系统仿真常用基本模块旳使用方法二、试验仪器计算机一台、MATLAB软件三、试验内容:用SIMULINK建立被控对象旳传递函数为,系统输入为单位阶跃,采用PID控制器进行闭环调整。①练习模块、连线旳操作,并将仿真时间定为300秒,其他用缺省值;②试用稳定边界法和衰减曲线法设置出合适旳PID参数,得出满意旳响应曲线。③设计M文献在一种窗口中绘制出系统输入和输出旳曲

单回路控制系统整定.docx
单回路控制系统整定一、实验目的掌握动态建模的创建方法。掌握单回路控制系统的理论整定方法和工程整定方法。了解调节器参数对控制品质的影响。.熟悉控制线性系统仿真常用基本模块的用法二、实验仪器计算机一台、MATLAB软件三、实验内容:用SIMULINK建立被控对象的传递函数为,系统输入为单位阶跃,采用PID控制器进行闭环调节。①练习模块、连线的操作,并将仿真时间定为300秒,其余用缺省值;②试用稳定边界法和衰减曲线法设置出合适的PID参数,得出满意的响应曲线。③设计M文件在一个窗口中绘制出系统输入和输出的曲线,

单回路控制系统整定实验报告.doc
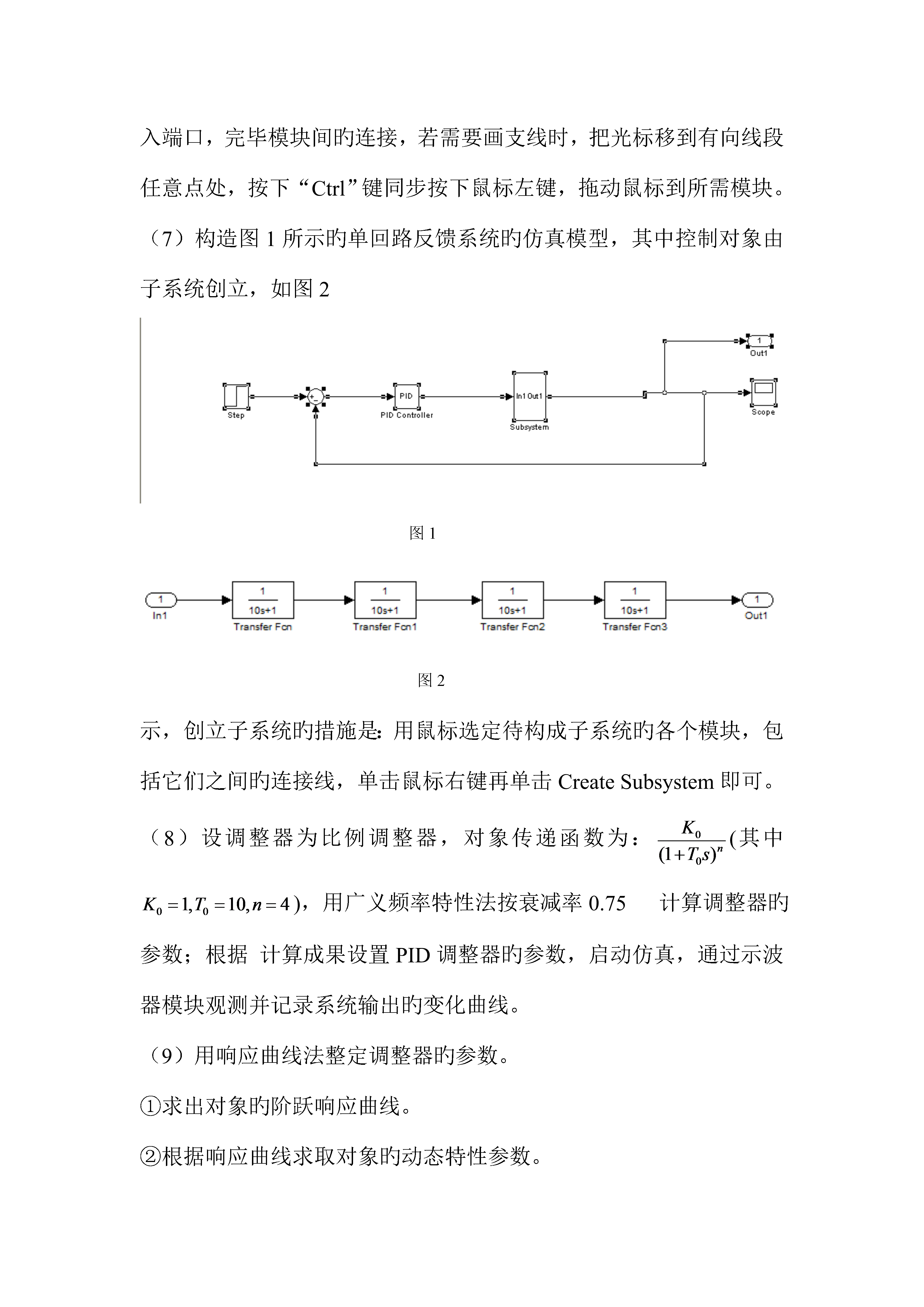
单回路控制系统整定实验报告一、实验目的(1)掌握动态模型的创建方法.。(2)掌握单回路控制系统的理论整定方法和工程整定方法。(3)了解调节器参数对控制品质的影响。二、实验仪器计算机一台三、实验步骤(1)启动计算机运行MATLAB应用程序。(2)在MATLAB命令窗口输入Smulink启动Simulink。(3)在Simulink库浏览窗口中单击工具栏中的新建窗口快捷按钮或在Simulink库窗口中选择菜单命令FileNewModeel打开一个标题为“Untitled”的空白模型编辑窗口。(4)用鼠
单回路控制系统整定实验报告.doc
单回路控制系统整定实验报告一、实验目的(1)掌握动态模型的创建方法.。(2)掌握单回路控制系统的理论整定方法和工程整定方法。(3)了解调节器参数对控制品质的影响。二、实验仪器计算机一台三、实验步骤(1)启动计算机运行MATLAB应用程序。(2)在MATLAB命令窗口输入Smulink启动Simulink。(3)在Simulink库浏览窗口中单击工具栏中的新建窗口快捷按钮或在Simulink库窗口中选择菜单命令FileNewModeel打开一个标题为“Untitled”的空白模型编辑窗口。(4)用鼠
单回路控制系统整定实验报告.doc
单回路控制系统整定实验报告一、实验目的(1)掌握动态模型的创建方法.。(2)掌握单回路控制系统的理论整定方法和工程整定方法。(3)了解调节器参数对控制品质的影响。二、实验仪器计算机一台三、实验步骤(1)启动计算机运行MATLAB应用程序。(2)在MATLAB命令窗口输入Smulink启动Simulink。(3)在Simulink库浏览窗口中单击工具栏中的新建窗口快捷按钮或在Simulink库窗口中选择菜单命令FileNewModeel打开一个标题为“Untitled”的空白模型编辑窗口。(4)用鼠