
移动X射线设备的电动助力操控装置及移动X射线设备.pdf

努力****星驰

1/10

2/10
3/10

4/10

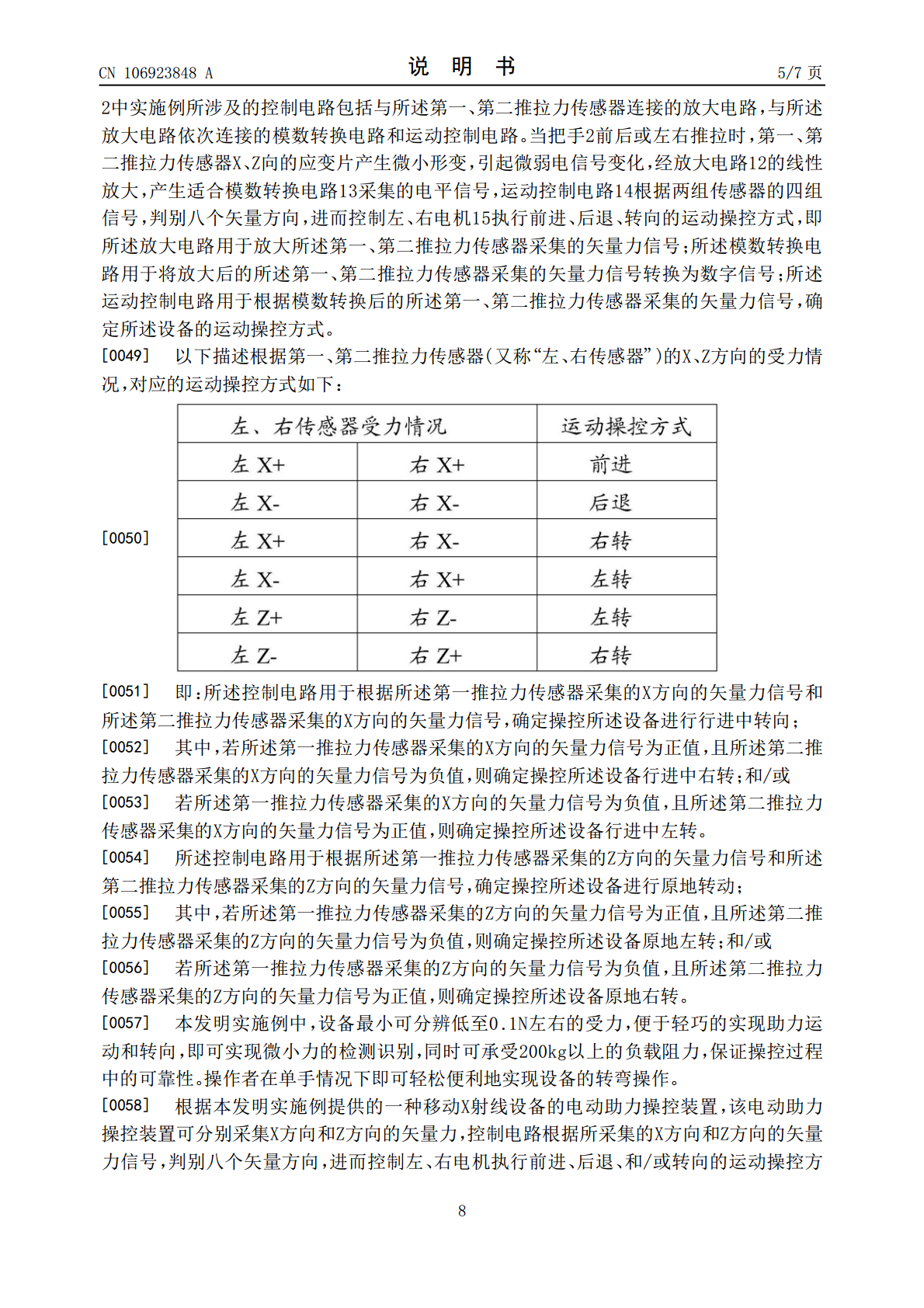
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
移动X射线设备的电动助力操控装置及移动X射线设备.pdf
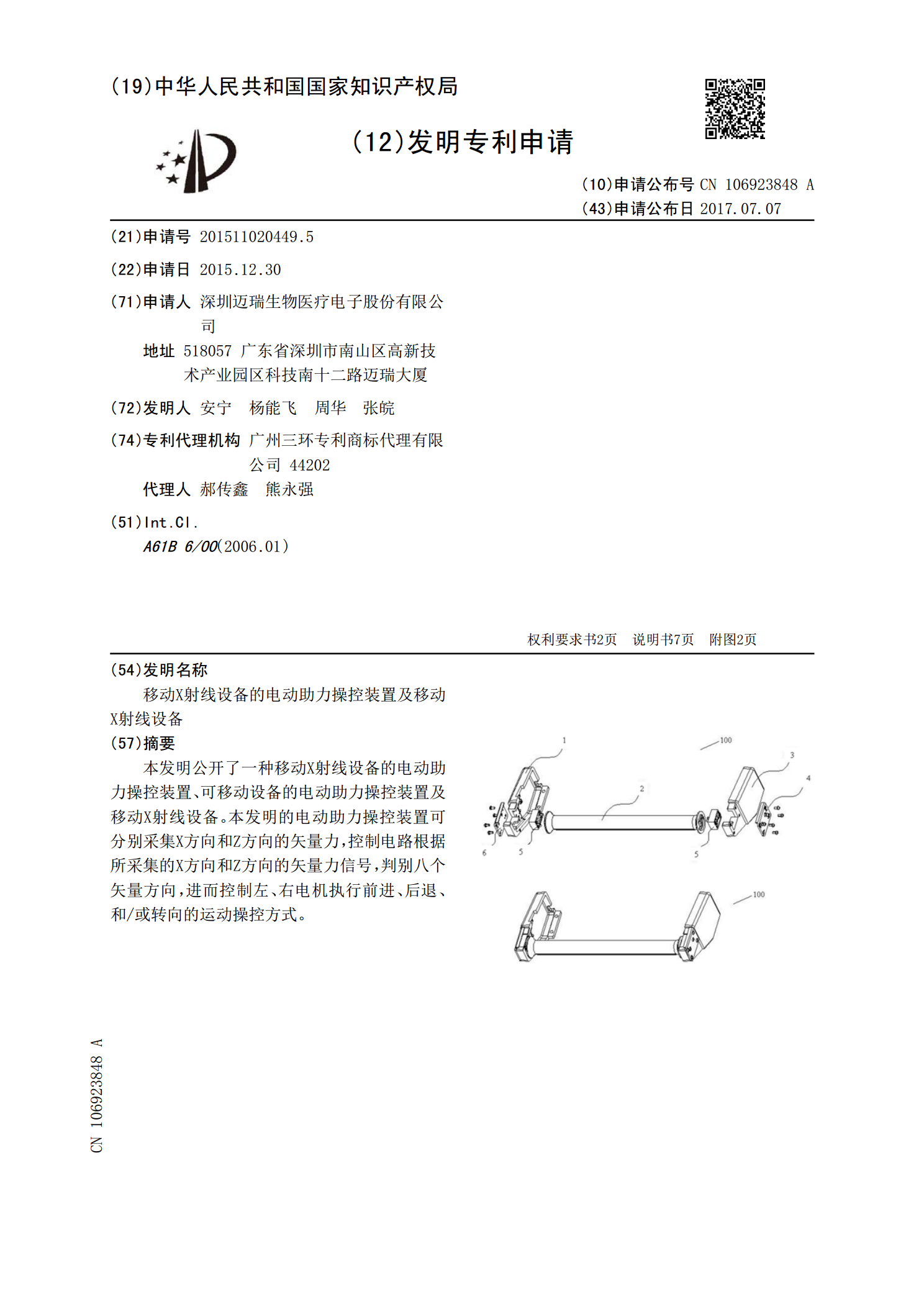
本发明公开了一种移动X射线设备的电动助力操控装置、可移动设备的电动助力操控装置及移动X射线设备。本发明的电动助力操控装置可分别采集X方向和Z方向的矢量力,控制电路根据所采集的X方向和Z方向的矢量力信号,判别八个矢量方向,进而控制左、右电机执行前进、后退、和/或转向的运动操控方式。
移动X射线成像装置.pdf
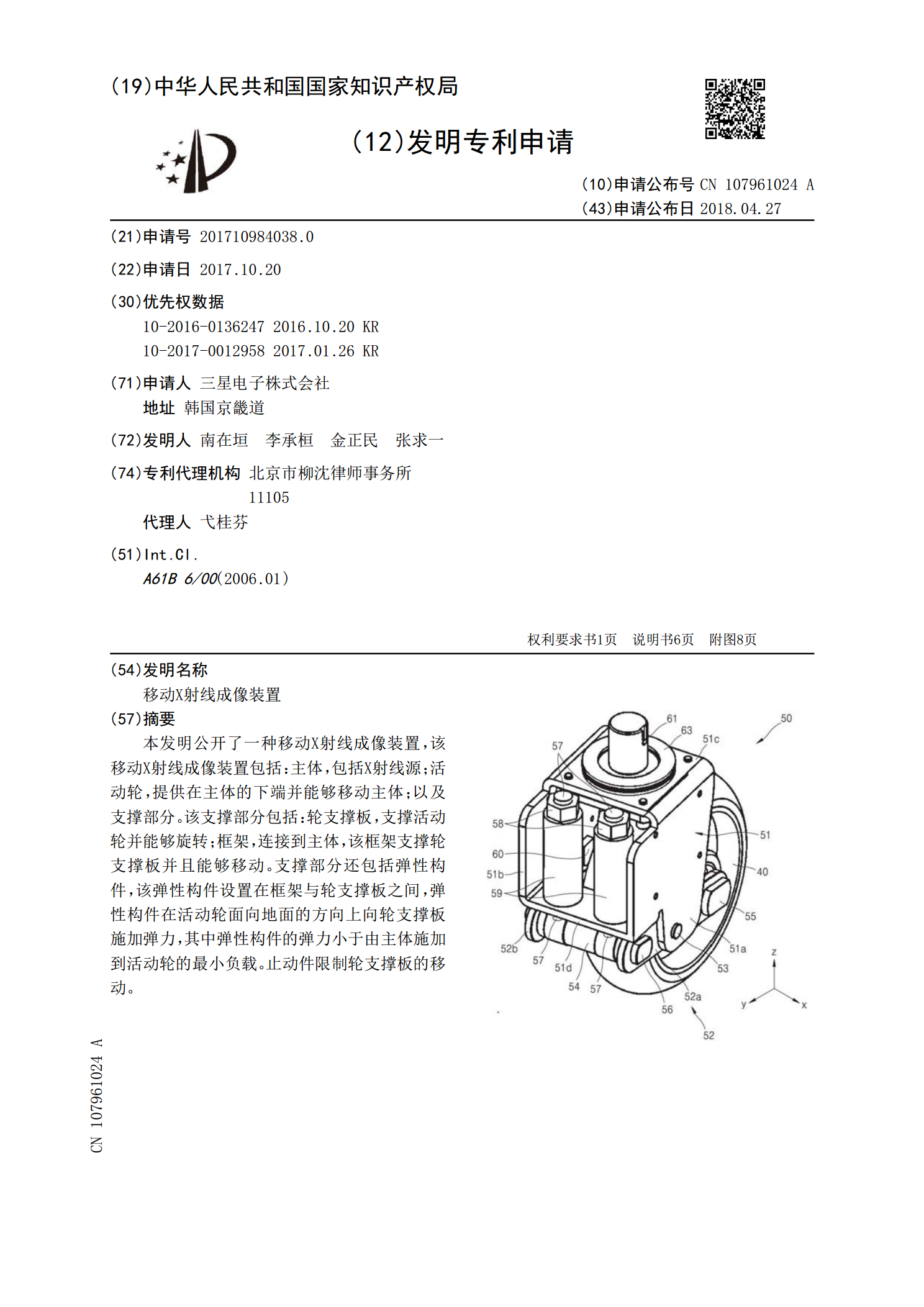
本发明公开了一种移动X射线成像装置,该移动X射线成像装置包括:主体,包括X射线源;活动轮,提供在主体的下端并能够移动主体;以及支撑部分。该支撑部分包括:轮支撑板,支撑活动轮并能够旋转;框架,连接到主体,该框架支撑轮支撑板并且能够移动。支撑部分还包括弹性构件,该弹性构件设置在框架与轮支撑板之间,弹性构件在活动轮面向地面的方向上向轮支撑板施加弹力,其中弹性构件的弹力小于由主体施加到活动轮的最小负载。止动件限制轮支撑板的移动。
移动型X射线装置.pdf
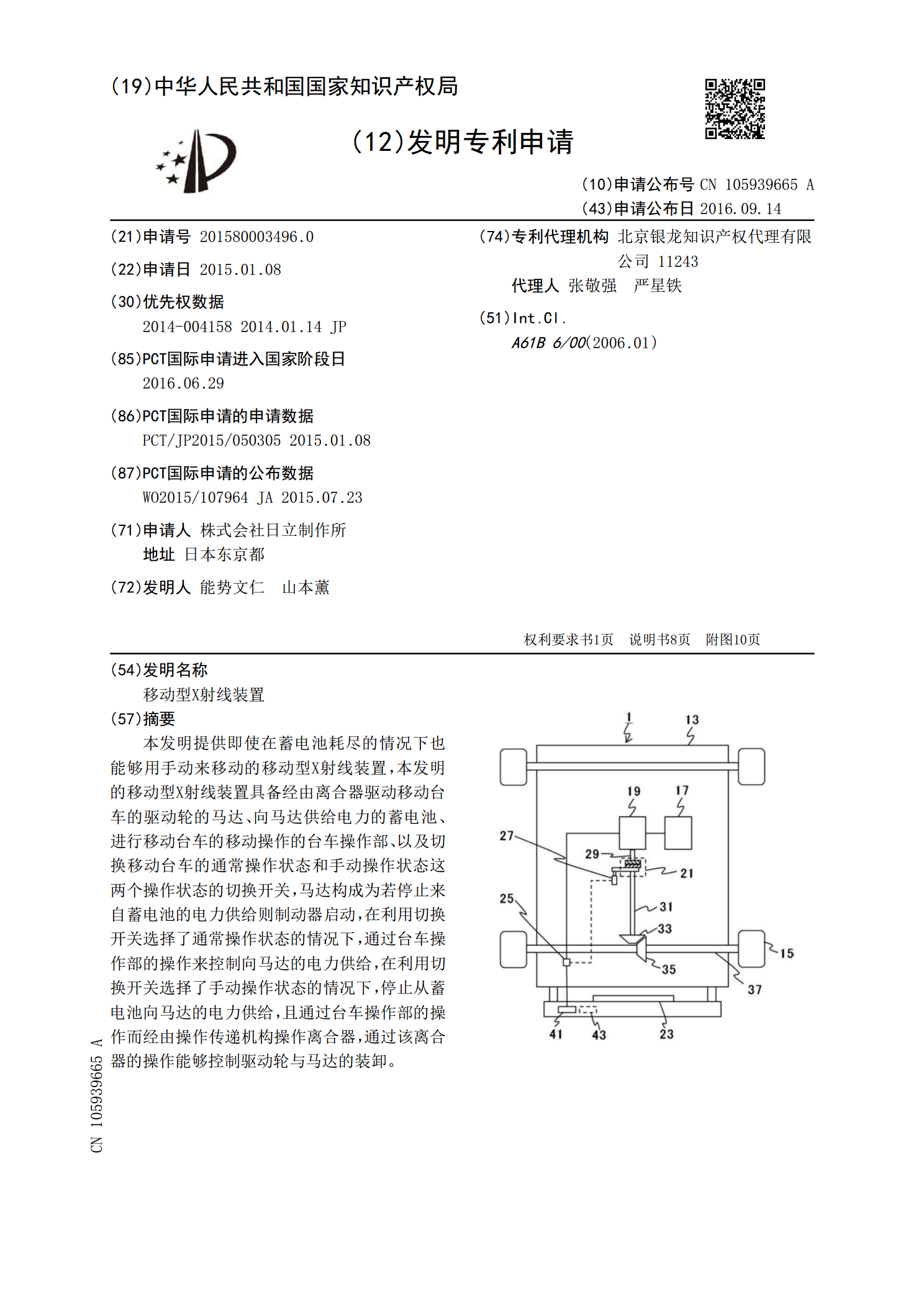
本发明提供即使在蓄电池耗尽的情况下也能够用手动来移动的移动型X射线装置,本发明的移动型X射线装置具备经由离合器驱动移动台车的驱动轮的马达、向马达供给电力的蓄电池、进行移动台车的移动操作的台车操作部、以及切换移动台车的通常操作状态和手动操作状态这两个操作状态的切换开关,马达构成为若停止来自蓄电池的电力供给则制动器启动,在利用切换开关选择了通常操作状态的情况下,通过台车操作部的操作来控制向马达的电力供给,在利用切换开关选择了手动操作状态的情况下,停止从蓄电池向马达的电力供给,且通过台车操作部的操作而经由操作传
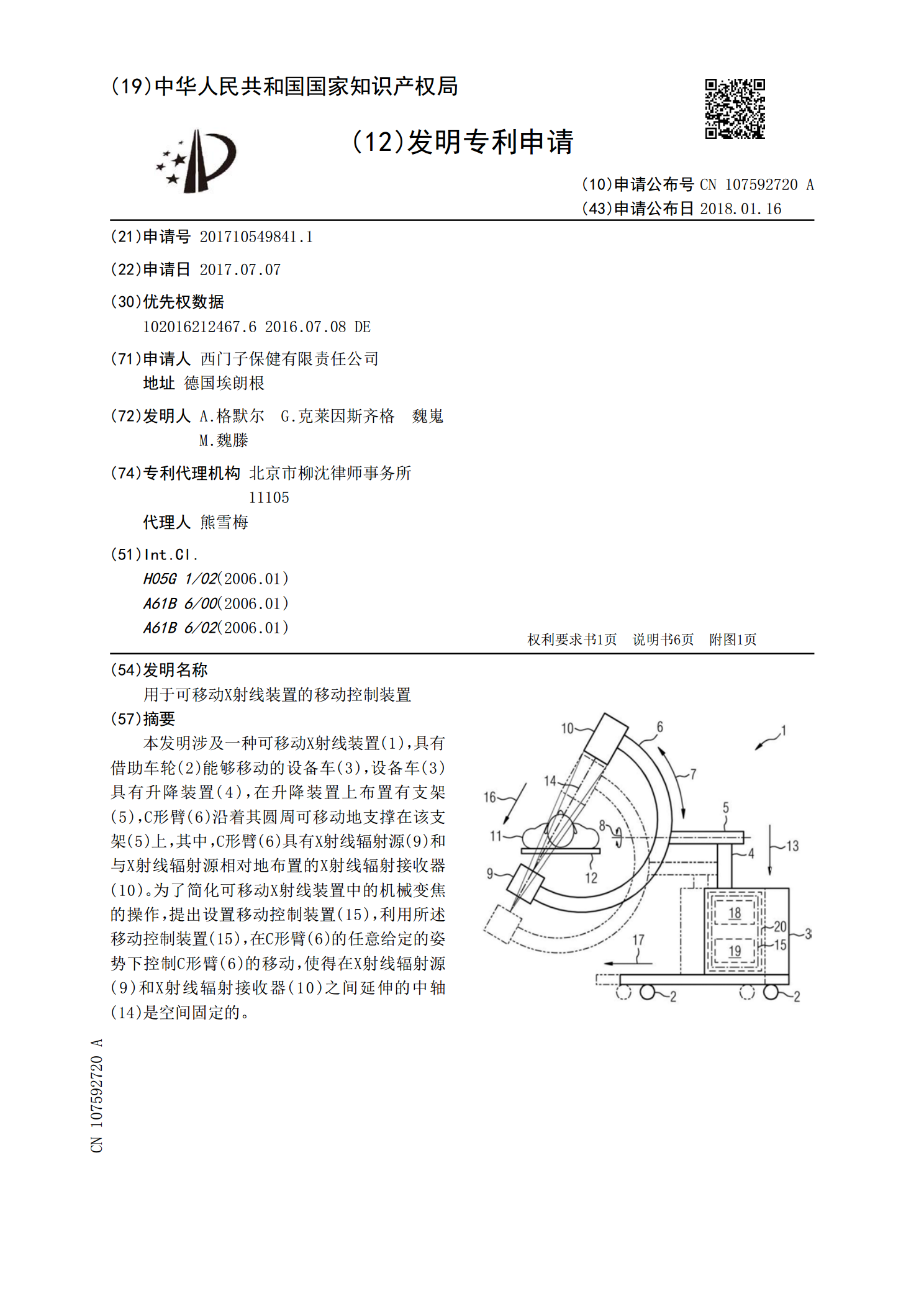
用于可移动X射线装置的移动控制装置.pdf
本发明涉及一种可移动X射线装置(1),具有借助车轮(2)能够移动的设备车(3),设备车(3)具有升降装置(4),在升降装置上布置有支架(5),C形臂(6)沿着其圆周可移动地支撑在该支架(5)上,其中,C形臂(6)具有X射线辐射源(9)和与X射线辐射源相对地布置的X射线辐射接收器(10)。为了简化可移动X射线装置中的机械变焦的操作,提出设置移动控制装置(15),利用所述移动控制装置(15),在C形臂(6)的任意给定的姿势下控制C形臂(6)的移动,使得在X射线辐射源(9)和X射线辐射接收器(10)之间延伸的中
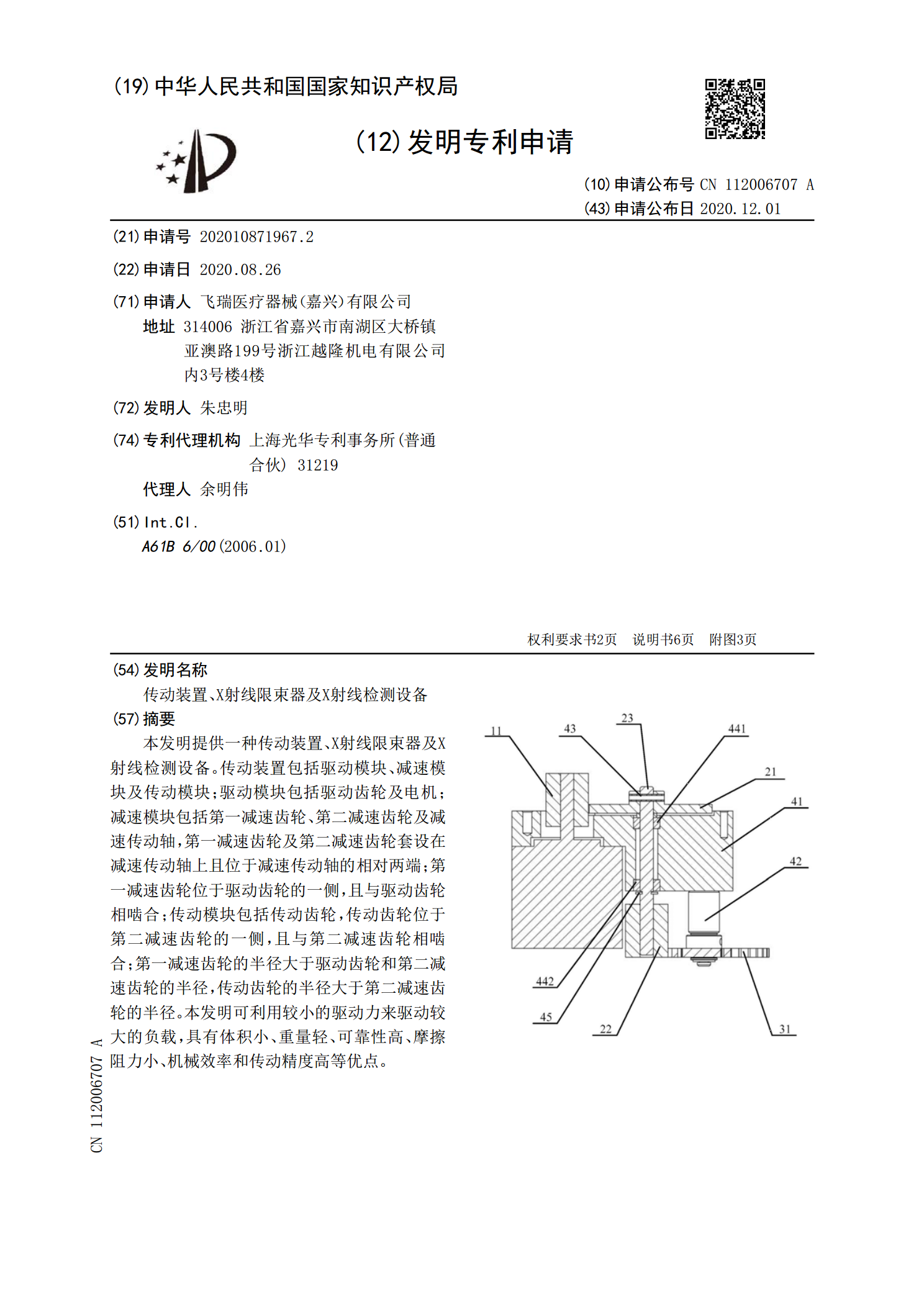
传动装置、X射线限束器及X射线检测设备.pdf
本发明提供一种传动装置、X射线限束器及X射线检测设备。传动装置包括驱动模块、减速模块及传动模块;驱动模块包括驱动齿轮及电机;减速模块包括第一减速齿轮、第二减速齿轮及减速传动轴,第一减速齿轮及第二减速齿轮套设在减速传动轴上且位于减速传动轴的相对两端;第一减速齿轮位于驱动齿轮的一侧,且与驱动齿轮相啮合;传动模块包括传动齿轮,传动齿轮位于第二减速齿轮的一侧,且与第二减速齿轮相啮合;第一减速齿轮的半径大于驱动齿轮和第二减速齿轮的半径,传动齿轮的半径大于第二减速齿轮的半径。本发明可利用较小的驱动力来驱动较大的负载,