
一种检测装置的校准方法、装置、终端设备和介质.pdf

是你****噩呀

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种检测装置的校准方法、装置、终端设备和介质.pdf
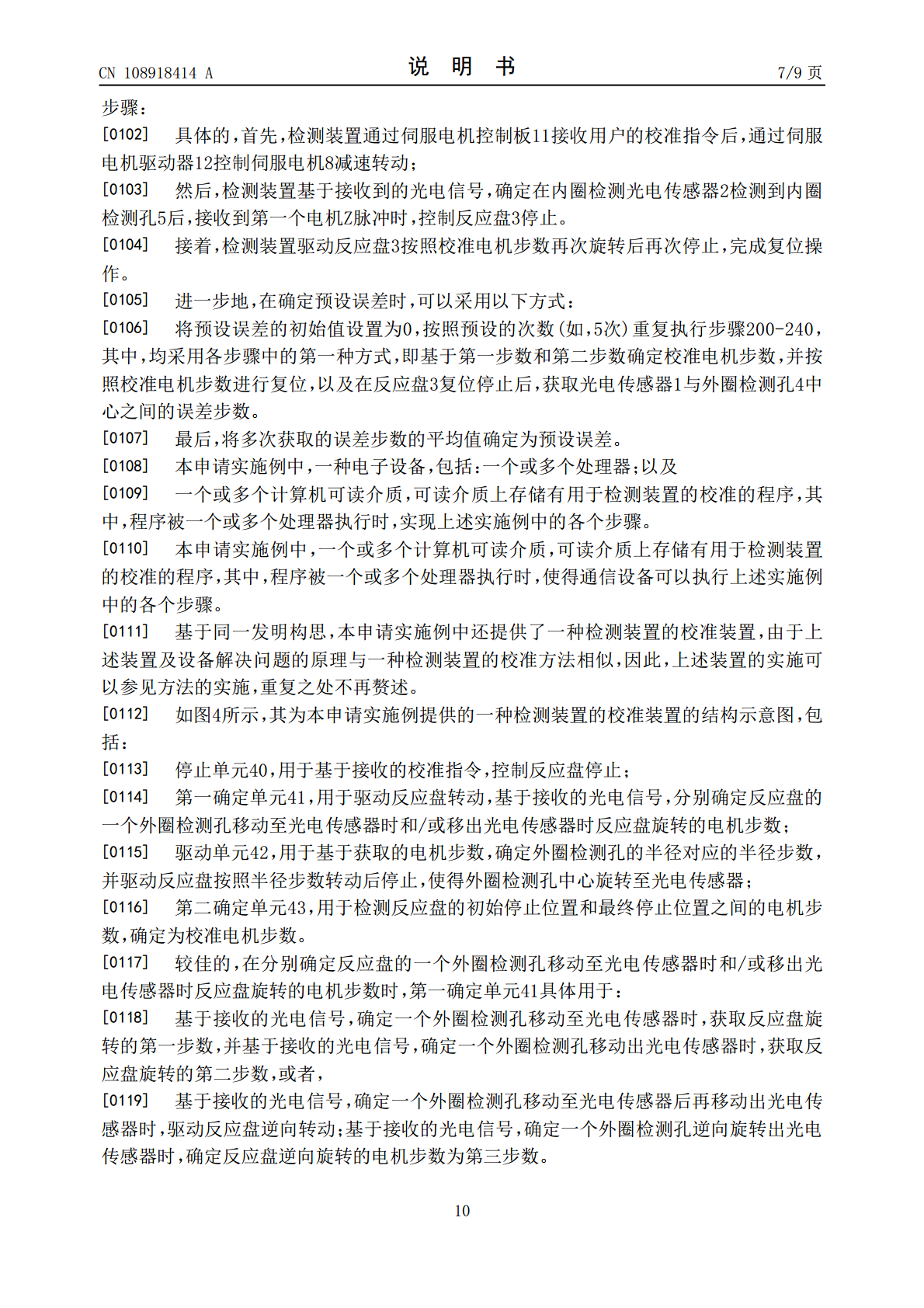
本申请公开了一种检测装置的校准方法、装置、终端设备和介质,属于检测技术领域,该方法包括,在反应盘基于校准指令停止后,再次驱动反应盘正向旋转,并基于光电信号分别确定外圈检测孔移动至光电传感器和/或移出光电传感器时反应盘旋转时的电机步数数据,确定外圈检测孔的半径步数,进而根据确定出的半径步数,将外圈检测孔中心旋转至光电传感器,最后将反应盘的初始停止位置和最终停止位置之间的电机步数确定为校准电机步数,这样,就可以根据校准电机步数,对初步停止后的反应盘的复位位置进行进一步调整,提高了反应盘复位的精度。
一种检测装置的校准方法、装置和终端设备.pdf
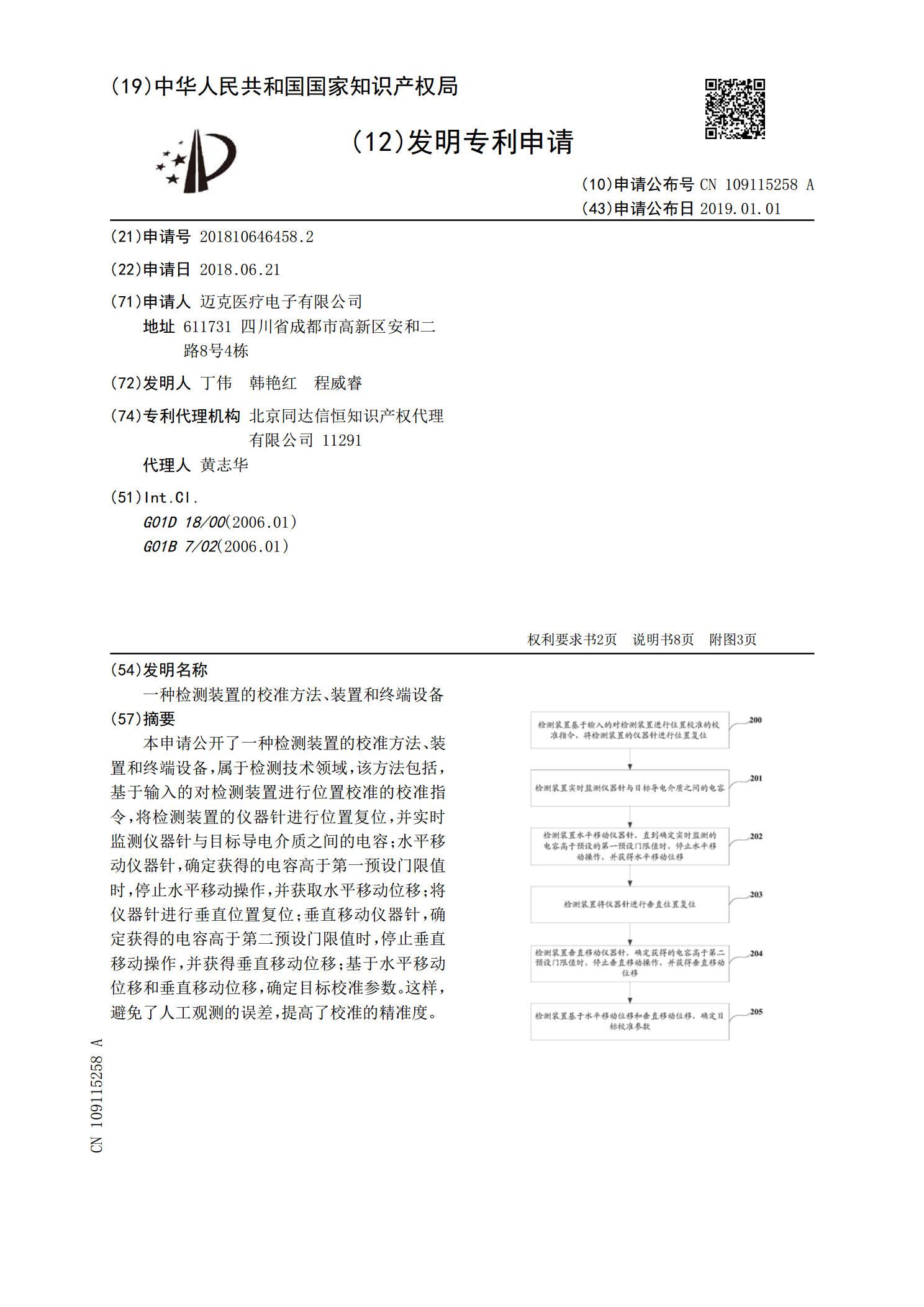
本申请公开了一种检测装置的校准方法、装置和终端设备,属于检测技术领域,该方法包括,基于输入的对检测装置进行位置校准的校准指令,将检测装置的仪器针进行位置复位,并实时监测仪器针与目标导电介质之间的电容;水平移动仪器针,确定获得的电容高于第一预设门限值时,停止水平移动操作,并获取水平移动位移;将仪器针进行垂直位置复位;垂直移动仪器针,确定获得的电容高于第二预设门限值时,停止垂直移动操作,并获得垂直移动位移;基于水平移动位移和垂直移动位移,确定目标校准参数。这样,避免了人工观测的误差,提高了校准的精准度。

一种信号校准方法、装置及存储介质和终端设备.pdf
本发明实施例公开了一种信号校准方法、装置及存储介质和终端设备,应用于通信技术领域。通信接收端会根据当前信号周期及其前m个信号周期的两路接收信号及预置的函数计算关系,计算中间参数,进而根据中间参数及更新步长更新校准参数,当更新后的校准参数满足预置的收敛条件时,将更新后的校准参数确定为最终的校准参数,最后再根据最终的校准参数对各个信号周期的两路接收信号进行校准。这样,在校准的过程中,实现了带有盲估计的校准方法,且在根据预置的函数计算关系计算中间参数及更新校准参数时,只需通过几个乘法器和加法器来实现,一般在1个
一种凝块检测的方法、装置、终端设备和介质.pdf
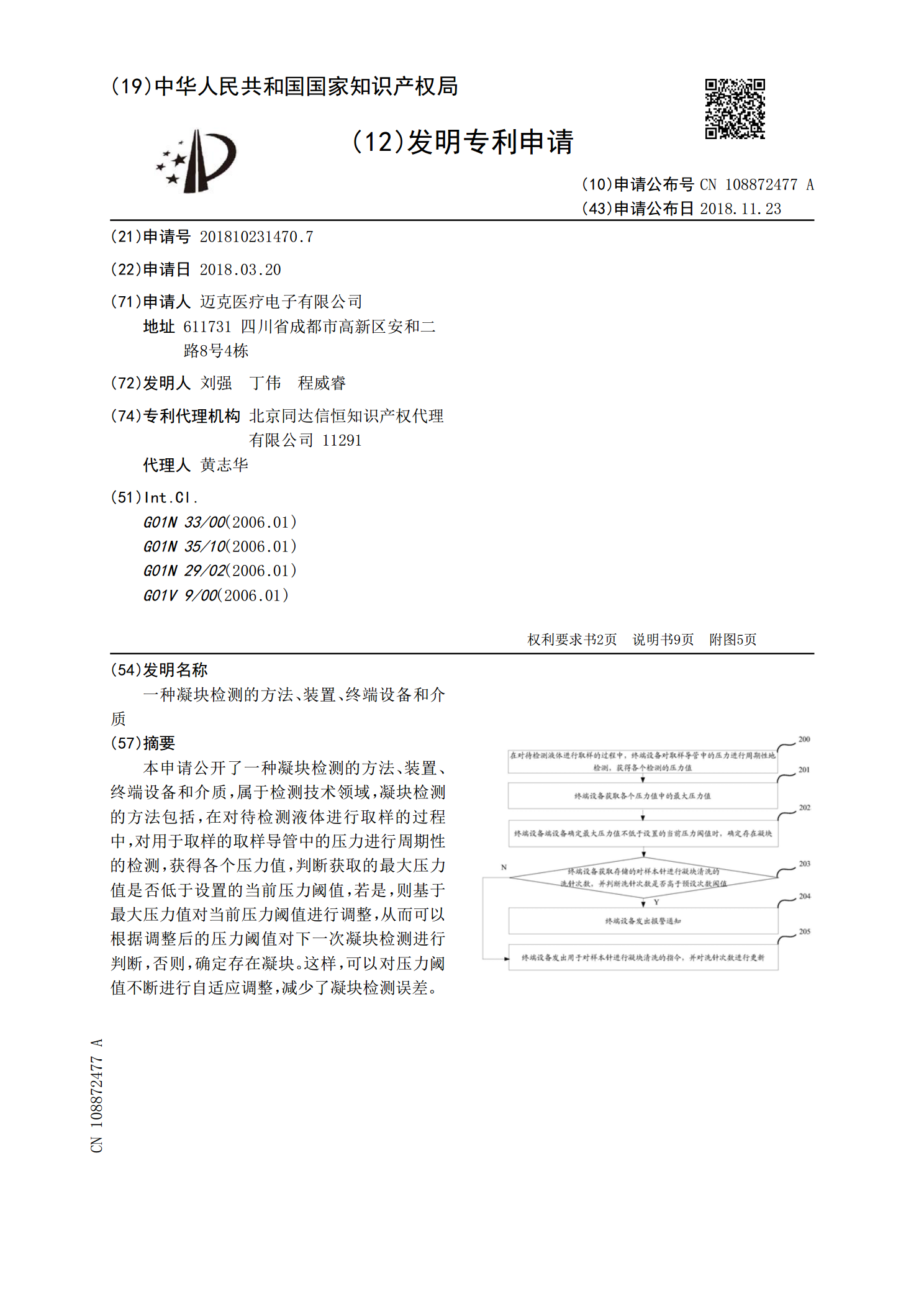
本申请公开了一种凝块检测的方法、装置、终端设备和介质,属于检测技术领域,凝块检测的方法包括,在对待检测液体进行取样的过程中,对用于取样的取样导管中的压力进行周期性的检测,获得各个压力值,判断获取的最大压力值是否低于设置的当前压力阈值,若是,则基于最大压力值对当前压力阈值进行调整,从而可以根据调整后的压力阈值对下一次凝块检测进行判断,否则,确定存在凝块。这样,可以对压力阈值不断进行自适应调整,减少了凝块检测误差。
一种凝块检测的方法、装置、终端设备和介质.pdf
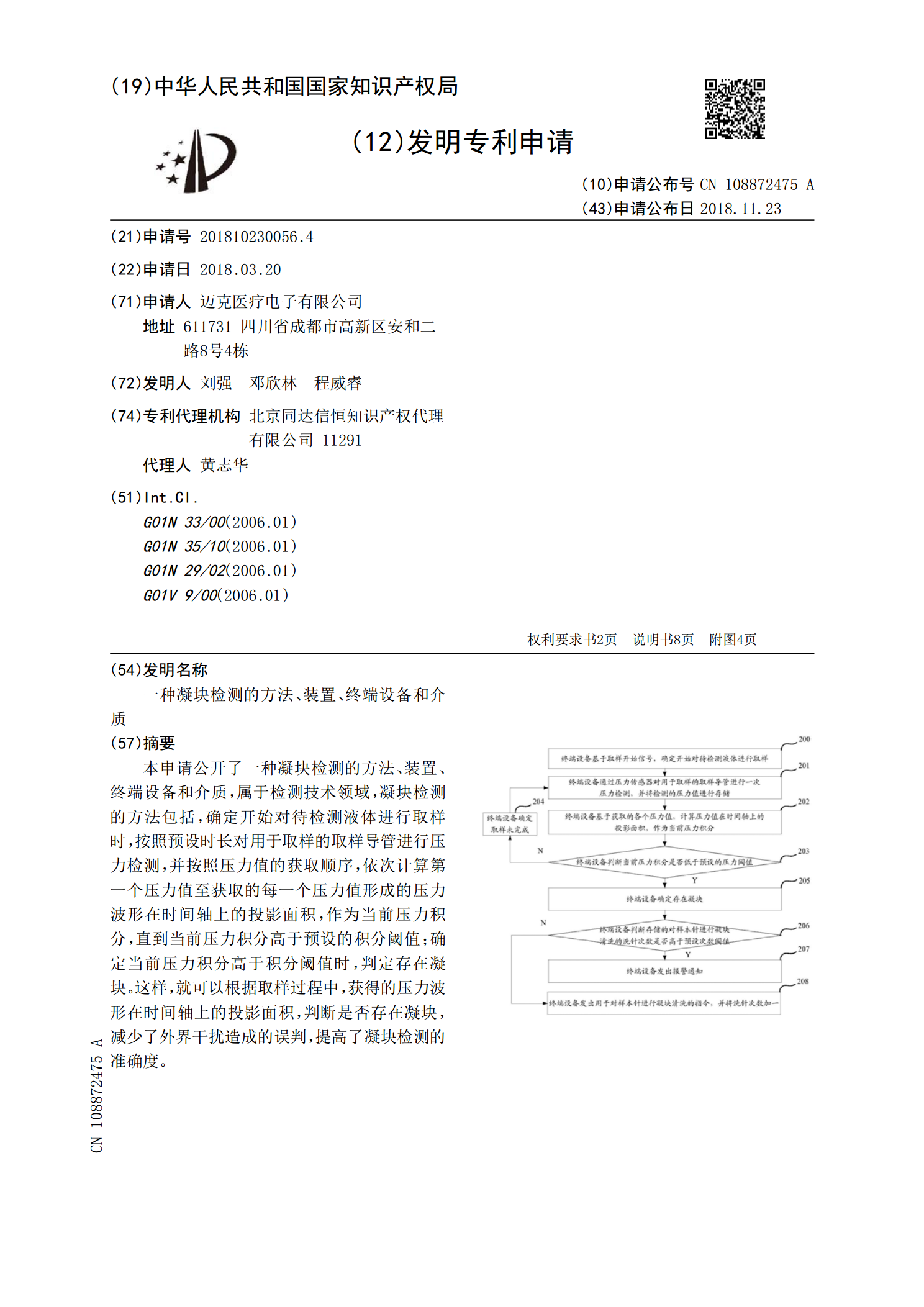
本申请公开了一种凝块检测的方法、装置、终端设备和介质,属于检测技术领域,凝块检测的方法包括,确定开始对待检测液体进行取样时,按照预设时长对用于取样的取样导管进行压力检测,并按照压力值的获取顺序,依次计算第一个压力值至获取的每一个压力值形成的压力波形在时间轴上的投影面积,作为当前压力积分,直到当前压力积分高于预设的积分阈值;确定当前压力积分高于积分阈值时,判定存在凝块。这样,就可以根据取样过程中,获得的压力波形在时间轴上的投影面积,判断是否存在凝块,减少了外界干扰造成的误判,提高了凝块检测的准确度。