
一种微型同轴差动式光纤迈克尔逊非本征型加速度计.pdf

努力****承悦

1/10

2/10
3/10

4/10

5/10

6/10
7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种微型同轴差动式光纤迈克尔逊非本征型加速度计.pdf
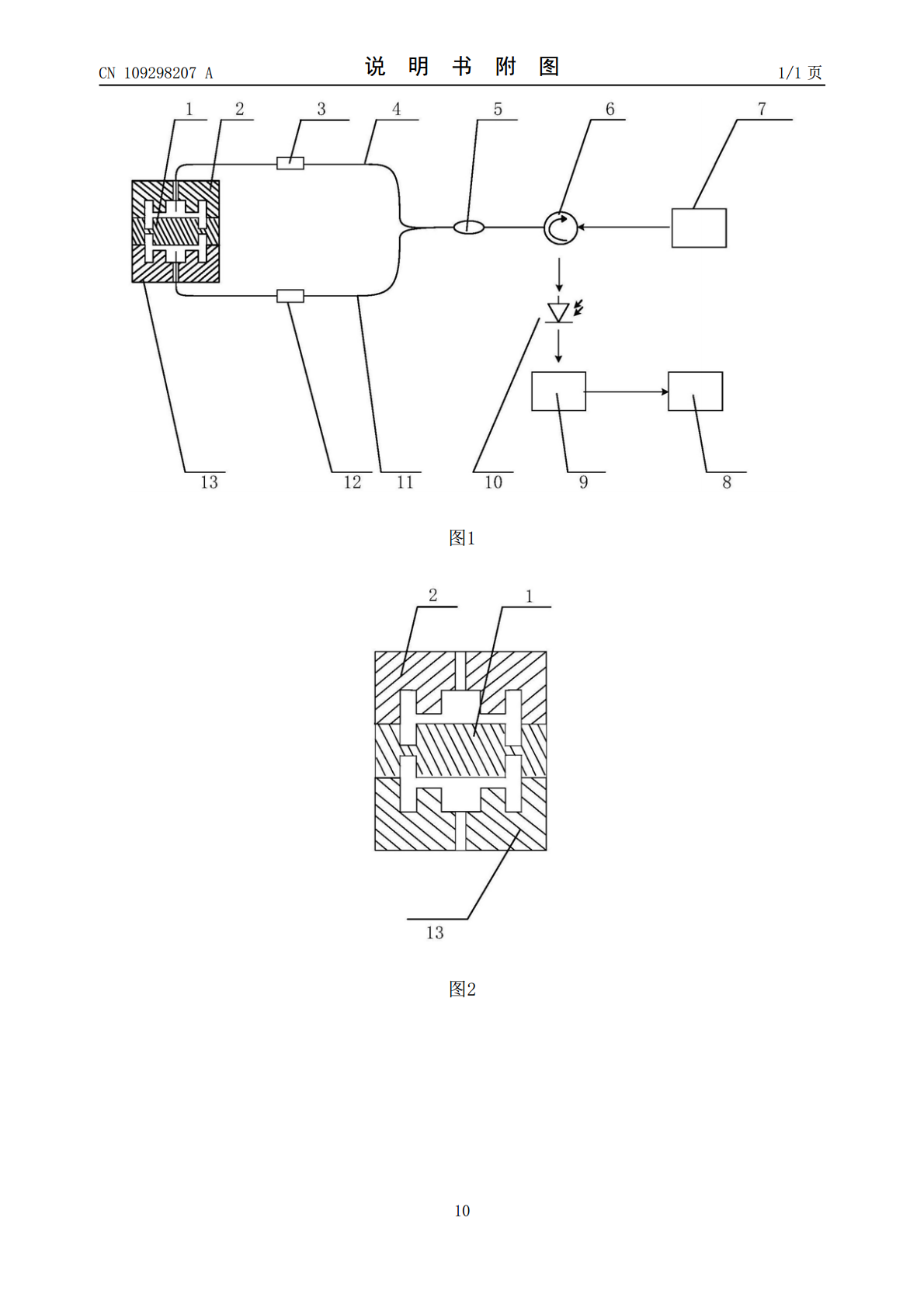
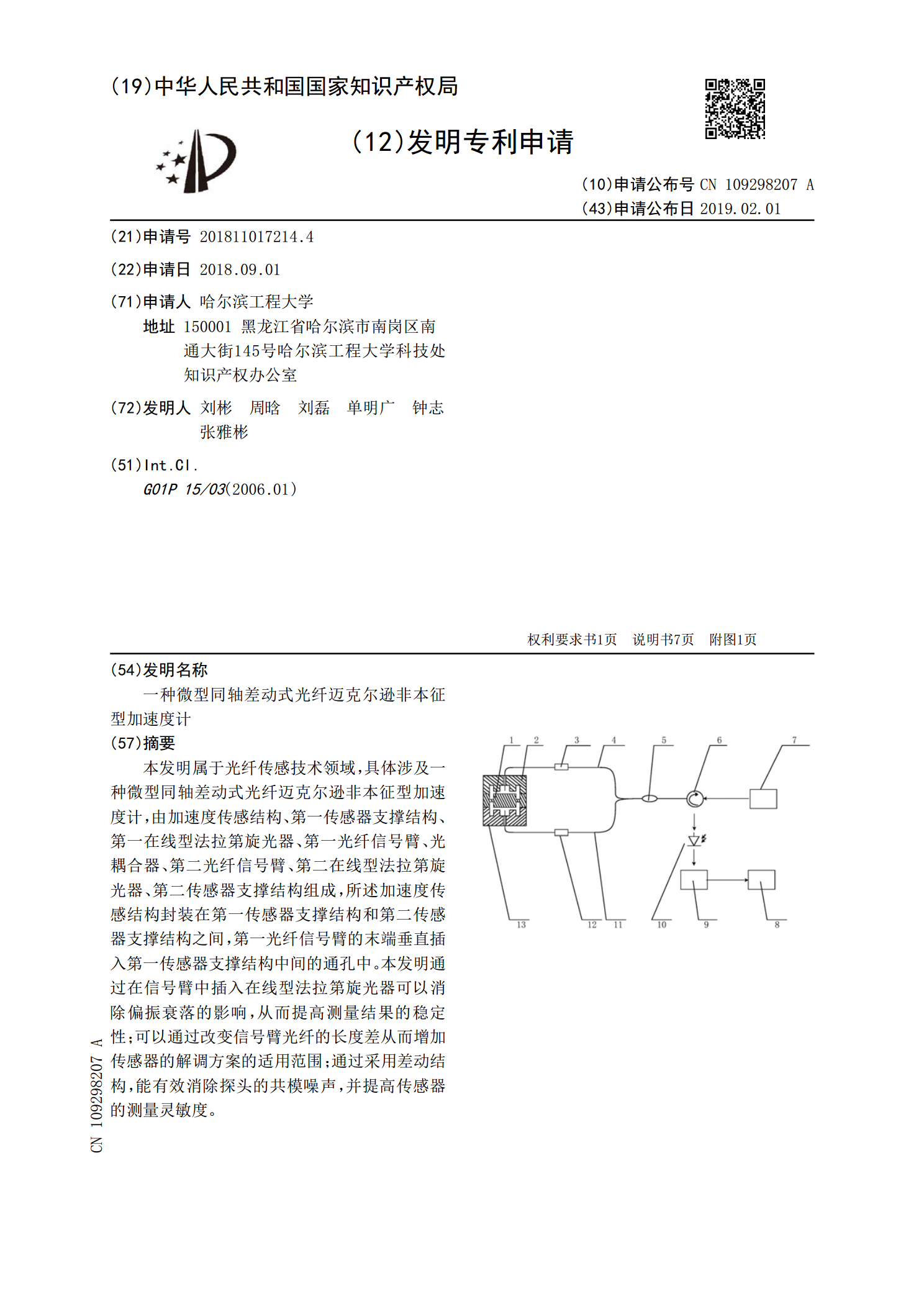
本发明属于光纤传感技术领域,具体涉及一种微型同轴差动式光纤迈克尔逊非本征型加速度计,由加速度传感结构、第一传感器支撑结构、第一在线型法拉第旋光器、第一光纤信号臂、光耦合器、第二光纤信号臂、第二在线型法拉第旋光器、第二传感器支撑结构组成,所述加速度传感结构封装在第一传感器支撑结构和第二传感器支撑结构之间,第一光纤信号臂的末端垂直插入第一传感器支撑结构中间的通孔中。本发明通过在信号臂中插入在线型法拉第旋光器可以消除偏振衰落的影响,从而提高测量结果的稳定性;可以通过改变信号臂光纤的长度差从而增加传感器的解调方案
一种微型同轴光纤迈克尔逊非本征型加速度计.pdf
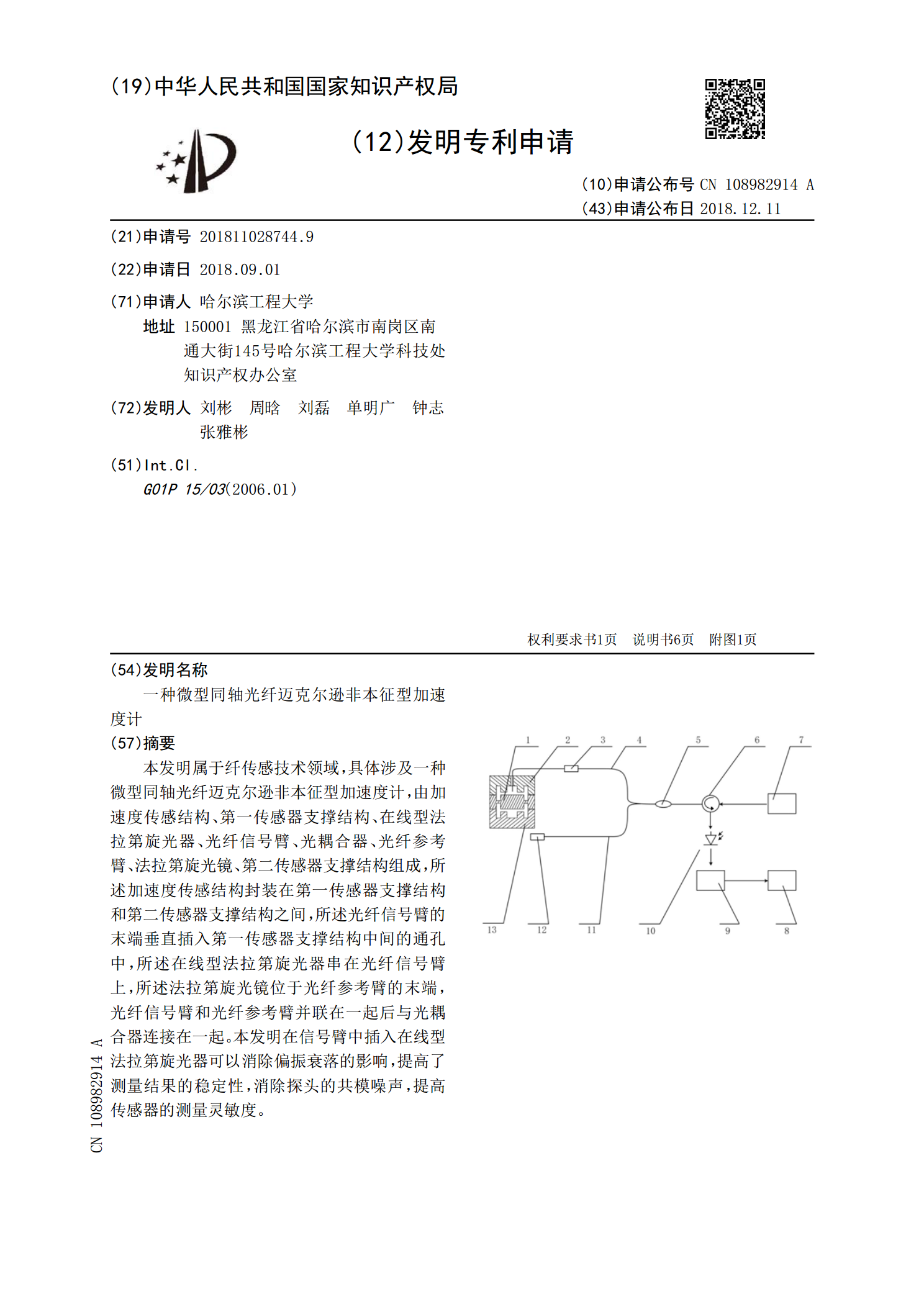
本发明属于纤传感技术领域,具体涉及一种微型同轴光纤迈克尔逊非本征型加速度计,由加速度传感结构、第一传感器支撑结构、在线型法拉第旋光器、光纤信号臂、光耦合器、光纤参考臂、法拉第旋光镜、第二传感器支撑结构组成,所述加速度传感结构封装在第一传感器支撑结构和第二传感器支撑结构之间,所述光纤信号臂的末端垂直插入第一传感器支撑结构中间的通孔中,所述在线型法拉第旋光器串在光纤信号臂上,所述法拉第旋光镜位于光纤参考臂的末端,光纤信号臂和光纤参考臂并联在一起后与光耦合器连接在一起。本发明在信号臂中插入在线型法拉第旋光器可以
一种微型差动式偏轴光纤迈克尔逊非本征型加速度计.pdf
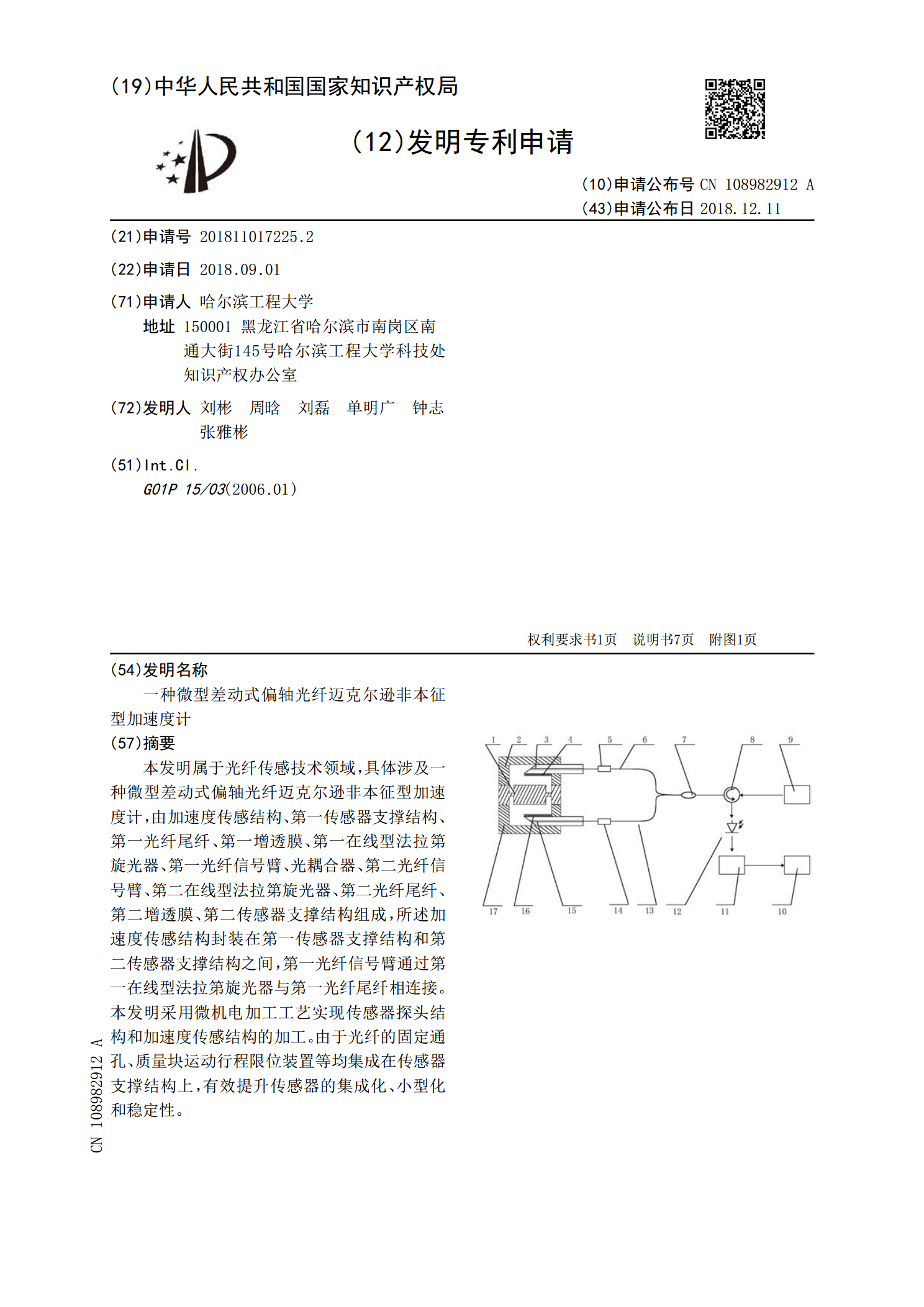
本发明属于光纤传感技术领域,具体涉及一种微型差动式偏轴光纤迈克尔逊非本征型加速度计,由加速度传感结构、第一传感器支撑结构、第一光纤尾纤、第一增透膜、第一在线型法拉第旋光器、第一光纤信号臂、光耦合器、第二光纤信号臂、第二在线型法拉第旋光器、第二光纤尾纤、第二增透膜、第二传感器支撑结构组成,所述加速度传感结构封装在第一传感器支撑结构和第二传感器支撑结构之间,第一光纤信号臂通过第一在线型法拉第旋光器与第一光纤尾纤相连接。本发明采用微机电加工工艺实现传感器探头结构和加速度传感结构的加工。由于光纤的固定通孔、质量块
基于迈克尔逊干涉仪的微型偏轴光纤迈克尔逊非本征型加速度计.pdf
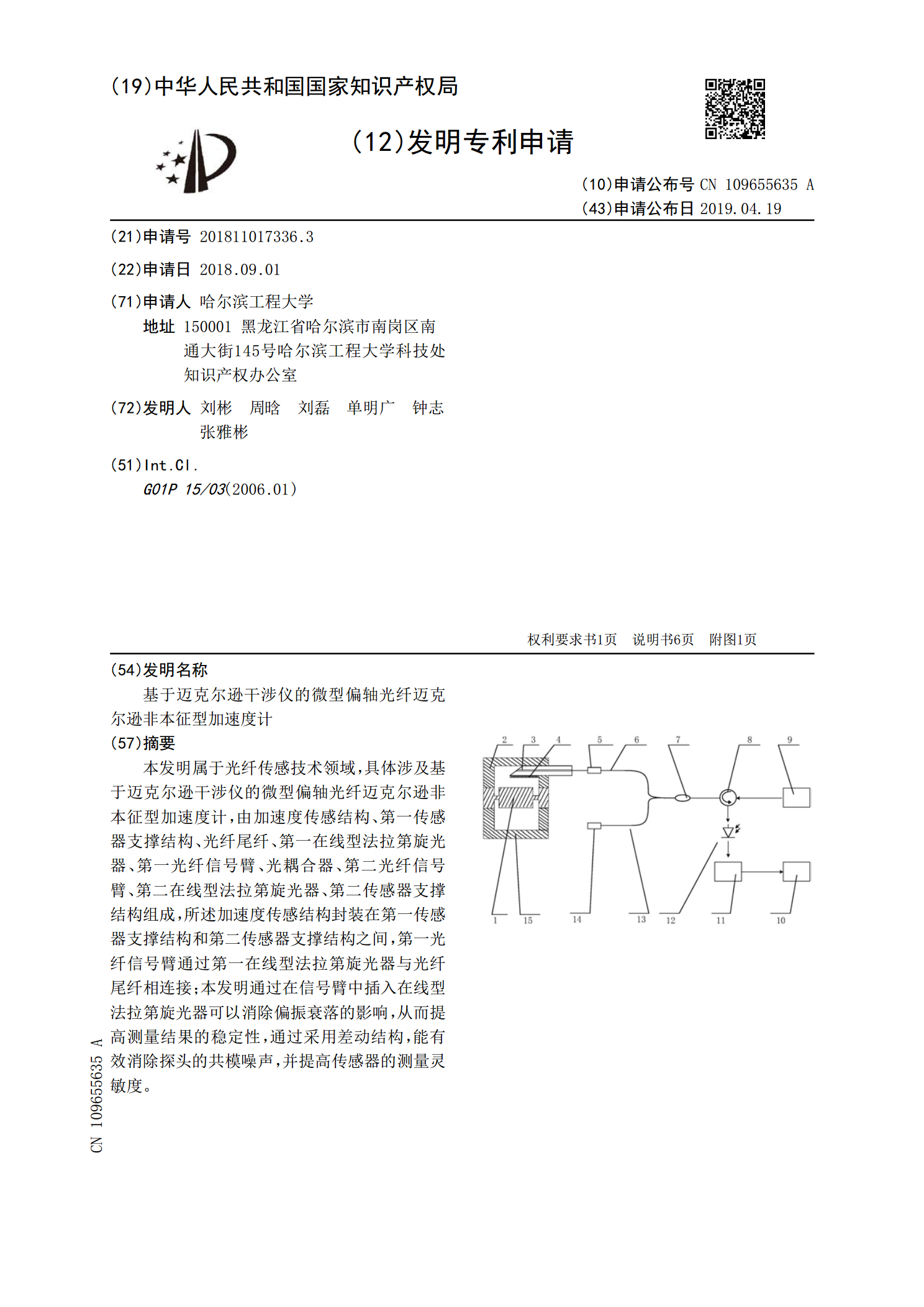
本发明属于光纤传感技术领域,具体涉及基于迈克尔逊干涉仪的微型偏轴光纤迈克尔逊非本征型加速度计,由加速度传感结构、第一传感器支撑结构、光纤尾纤、第一在线型法拉第旋光器、第一光纤信号臂、光耦合器、第二光纤信号臂、第二在线型法拉第旋光器、第二传感器支撑结构组成,所述加速度传感结构封装在第一传感器支撑结构和第二传感器支撑结构之间,第一光纤信号臂通过第一在线型法拉第旋光器与光纤尾纤相连接;本发明通过在信号臂中插入在线型法拉第旋光器可以消除偏振衰落的影响,从而提高测量结果的稳定性,通过采用差动结构,能有效消除探头的共
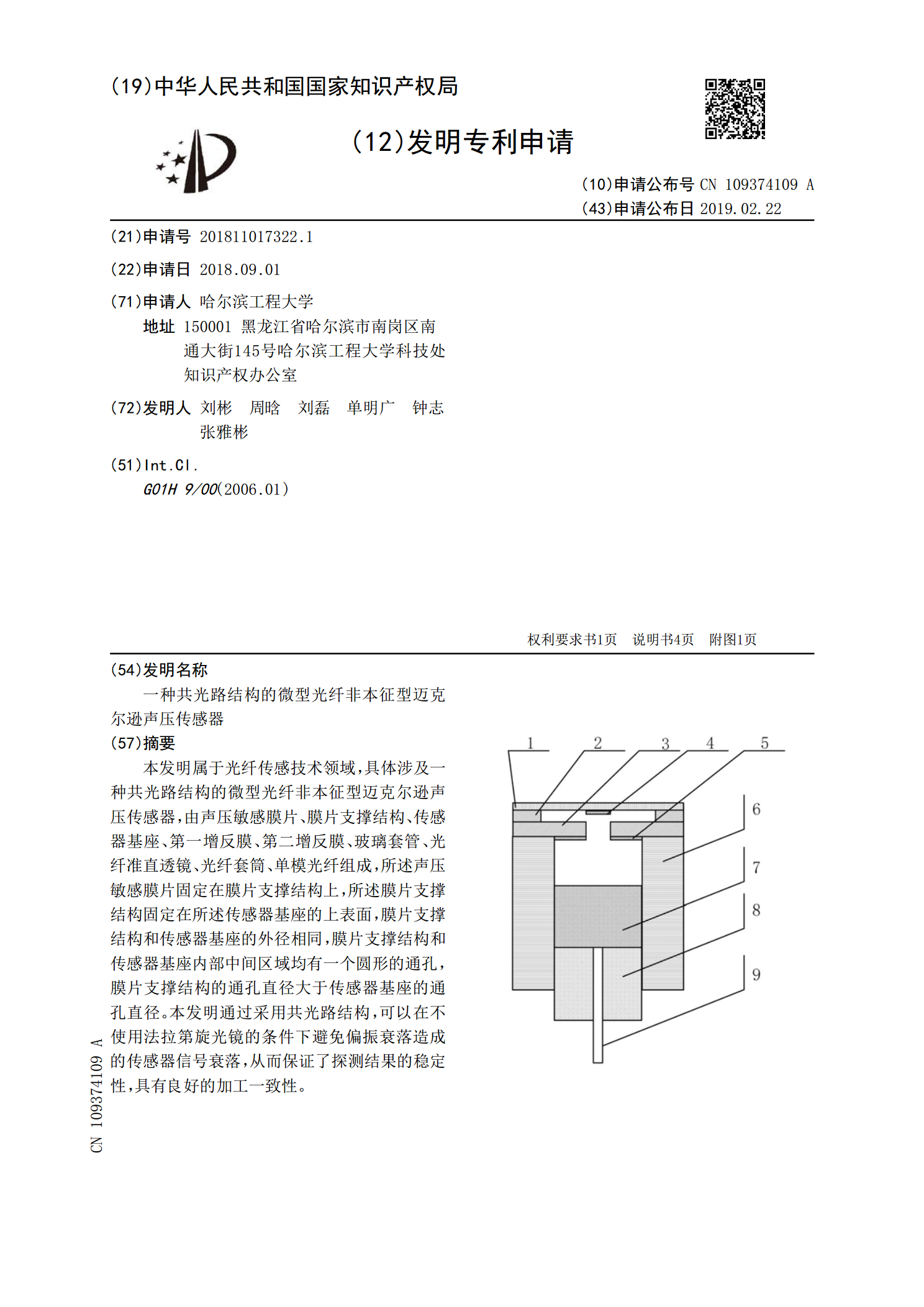
一种共光路结构的微型光纤非本征型迈克尔逊声压传感器.pdf
本发明属于光纤传感技术领域,具体涉及一种共光路结构的微型光纤非本征型迈克尔逊声压传感器,由声压敏感膜片、膜片支撑结构、传感器基座、第一增反膜、第二增反膜、玻璃套管、光纤准直透镜、光纤套筒、单模光纤组成,所述声压敏感膜片固定在膜片支撑结构上,所述膜片支撑结构固定在所述传感器基座的上表面,膜片支撑结构和传感器基座的外径相同,膜片支撑结构和传感器基座内部中间区域均有一个圆形的通孔,膜片支撑结构的通孔直径大于传感器基座的通孔直径。本发明通过采用共光路结构,可以在不使用法拉第旋光镜的条件下避免偏振衰落造成的传感器信