
用于360°全景泊车辅助系统的标定布、场地及方法.pdf

是浩****32


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用于360°全景泊车辅助系统的标定布、场地及方法.pdf
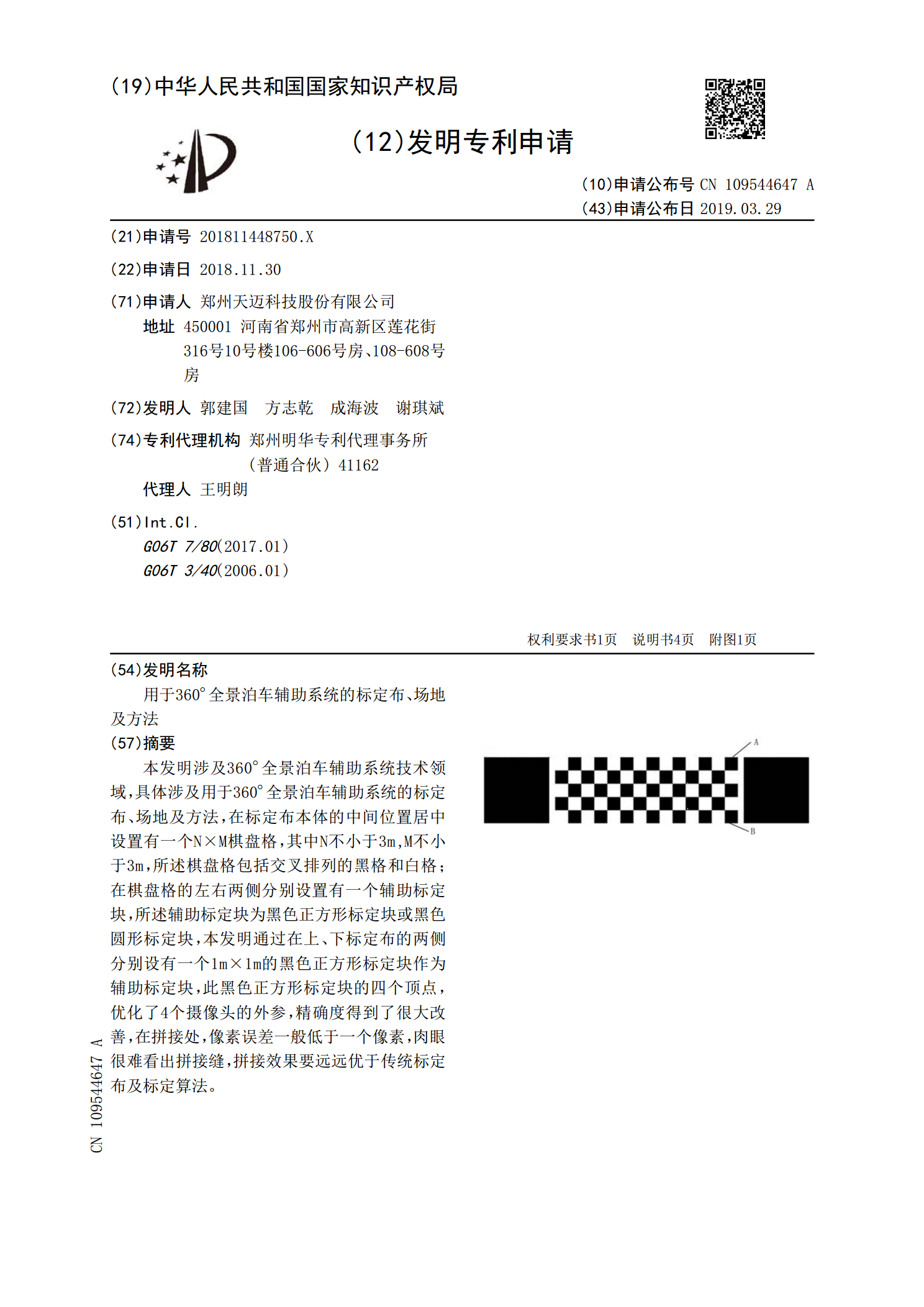
本发明涉及360°全景泊车辅助系统技术领域,具体涉及用于360°全景泊车辅助系统的标定布、场地及方法,在标定布本体的中间位置居中设置有一个N×M棋盘格,其中N不小于3m,M不小于3m,所述棋盘格包括交叉排列的黑格和白格;在棋盘格的左右两侧分别设置有一个辅助标定块,所述辅助标定块为黑色正方形标定块或黑色圆形标定块,本发明通过在上、下标定布的两侧分别设有一个1m×1m的黑色正方形标定块作为辅助标定块,此黑色正方形标定块的四个顶点,优化了4个摄像头的外参,精确度得到了很大改善,在拼接处,像素误差一般低于一个像素

360度全景泊车辅助系统的研究的任务书.docx
360度全景泊车辅助系统的研究的任务书任务书一、任务背景随着社会的发展和科技的进步,汽车成为了现代人出行的主要交通工具之一。随着汽车数量的逐年增加,停车成为了一个日益困扰人们的问题,停车难、停车费贵、停车事故多,已成为城市交通的一大难题。如何提高停车效率和安全性,降低停车事故率,已成为一个亟待解决的问题。360度全景泊车辅助系统是一种新型的停车辅助技术,它能够通过多个摄像头采集车辆周围的环境信息,并将其显示在车辆控制台上,辅助驾驶员操作车辆完成泊车。该系统可以提高车辆泊车的精度和速度,降低泊车事故的风险,

确定全景泊车系统标定时机的方法及装置.pdf
本发明实施例提供一种确定全景泊车系统标定时机的方法及装置,获取记录车辆周围不同视角环境的图像,其中记录相邻视角环境的图像具有重叠区域;若相邻视角环境对应的两幅图像中,重叠区域的图像的偏差值超过设定偏差阈值,发送需重新标定的提示信号。通过上述方案,根据图像差异分析自动判断是否需要对全景泊车系统重新标定,具有较高的准确性,并且一旦发现需要重新标定全景泊车系统时,立即提醒驾驶员,保证驾驶员及时获取到重新标定的提示信号,避免驾驶员使用具有偏差的泊车系统给泊车过程带来安全隐患。

基于FPGA的360度全景泊车辅助系统的设计与实现的任务书.docx
基于FPGA的360度全景泊车辅助系统的设计与实现的任务书一、任务概述本任务旨在设计并实现一款基于FPGA的360度全景泊车辅助系统,该系统应能够通过各种传感器获取车辆周围的实时图像,然后将这些图像通过FPGA进行处理和合成,最终呈现出全景图像,辅助驾驶员完成泊车操作。二、任务需求1.系统总体设计本项目应包括以下几个方面的设计:传感器采集系统、图像处理系统、图像合成系统和显示与控制系统。2.传感器采集系统该系统应包括多个传感器,用于获取车辆周围的实时图像。具体的传感器种类和数量由实际情况决定,需要保证这些
一种全景泊车辅助系统.pdf
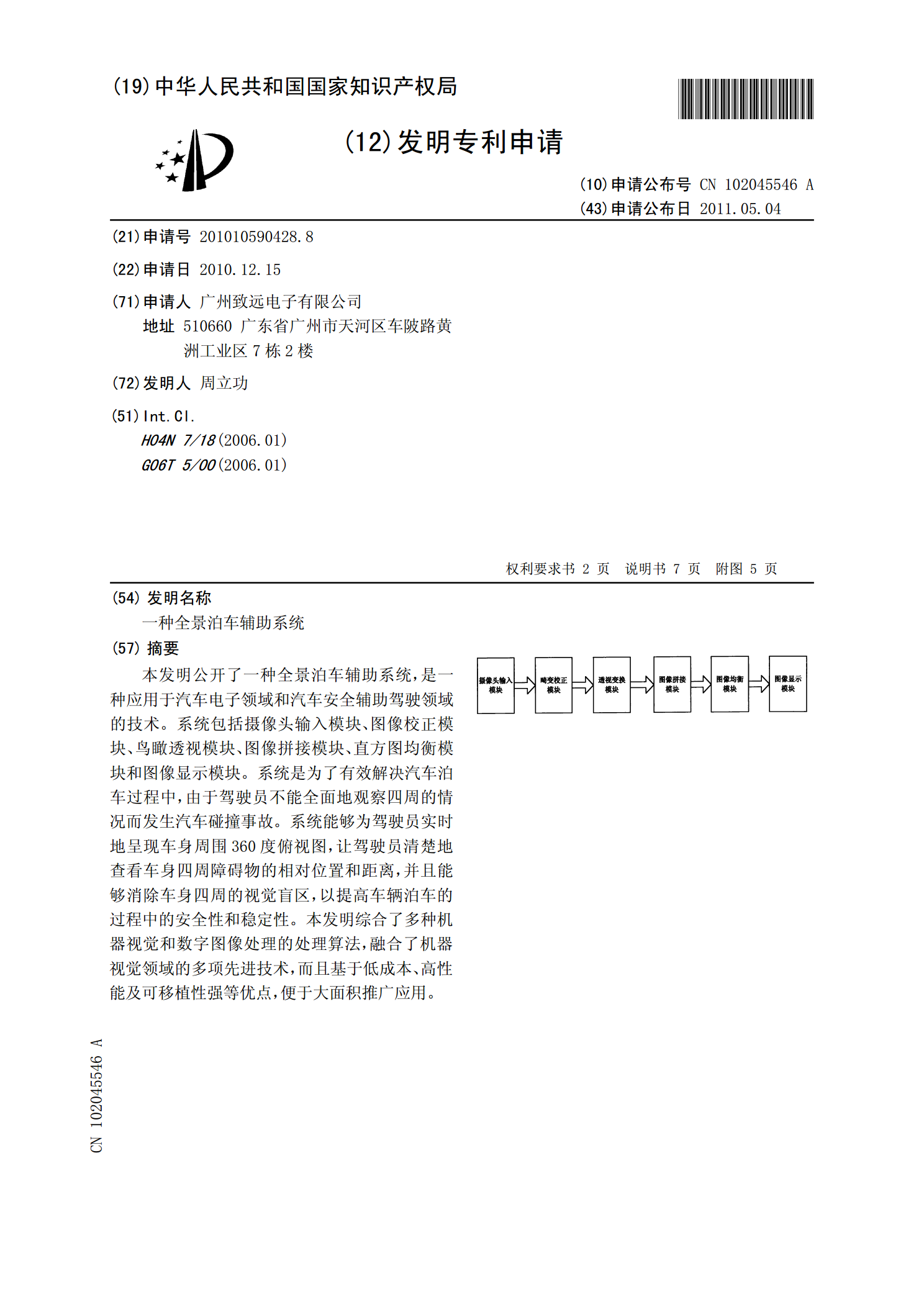
本发明公开了一种全景泊车辅助系统,是一种应用于汽车电子领域和汽车安全辅助驾驶领域的技术。系统包括摄像头输入模块、图像校正模块、鸟瞰透视模块、图像拼接模块、直方图均衡模块和图像显示模块。系统是为了有效解决汽车泊车过程中,由于驾驶员不能全面地观察四周的情况而发生汽车碰撞事故。系统能够为驾驶员实时地呈现车身周围360度俯视图,让驾驶员清楚地查看车身四周障碍物的相对位置和距离,并且能够消除车身四周的视觉盲区,以提高车辆泊车的过程中的安全性和稳定性。本发明综合了多种机器视觉和数字图像处理的处理算法,融合了机器视觉领