
一种基于光纤迈克尔逊干涉仪的声源定位系统.pdf

一只****ua


1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于光纤迈克尔逊干涉仪的声源定位系统.pdf
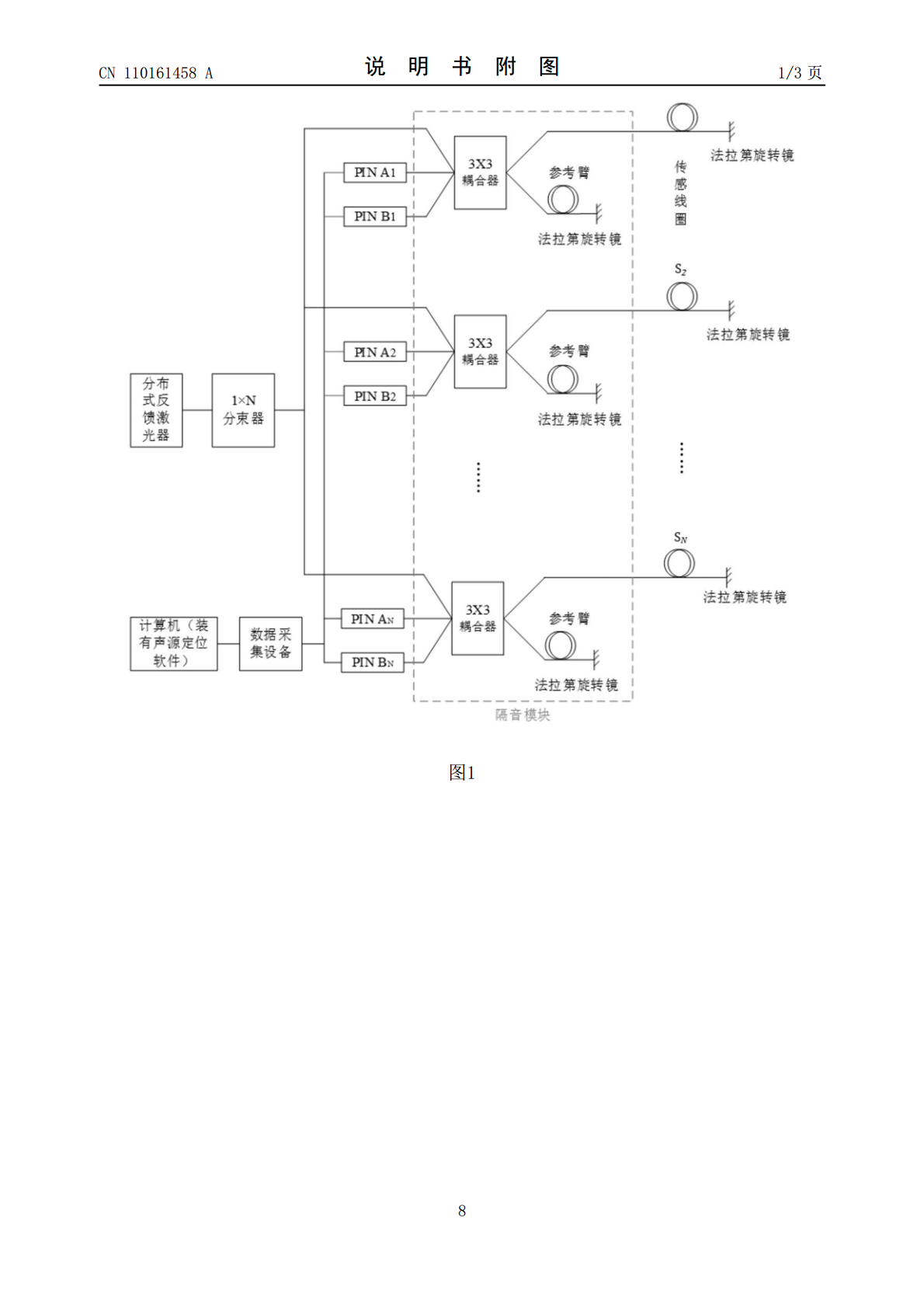
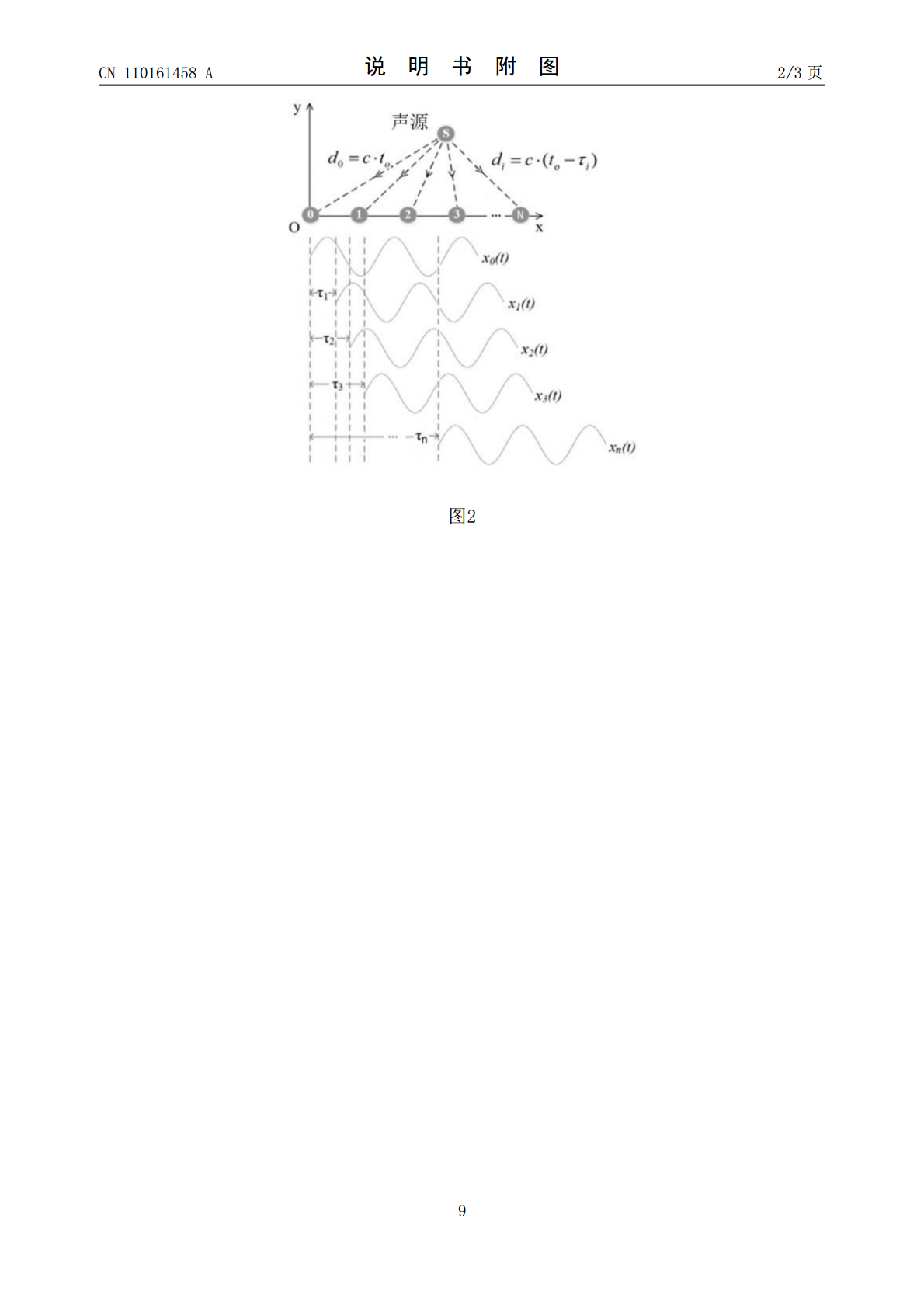
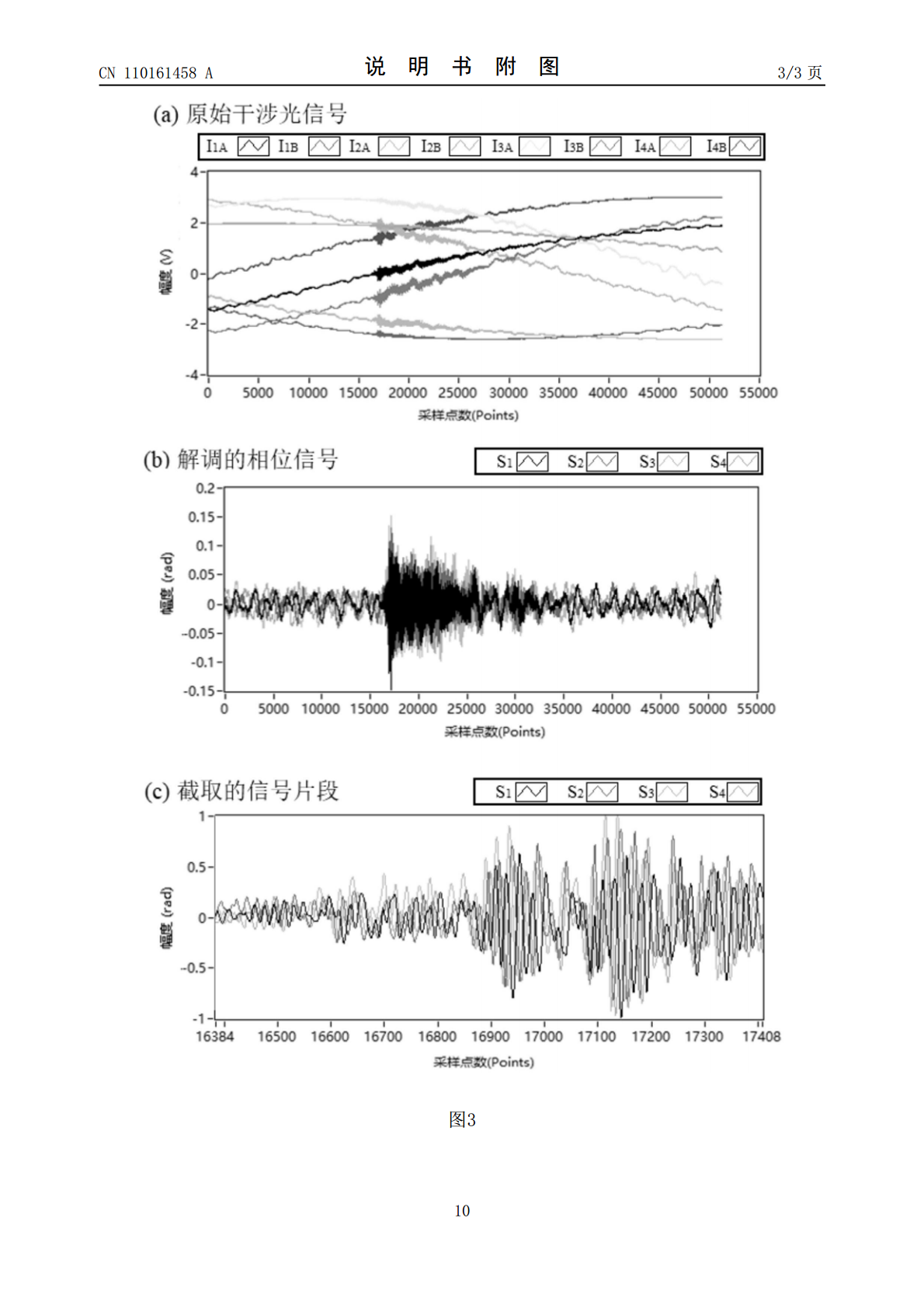
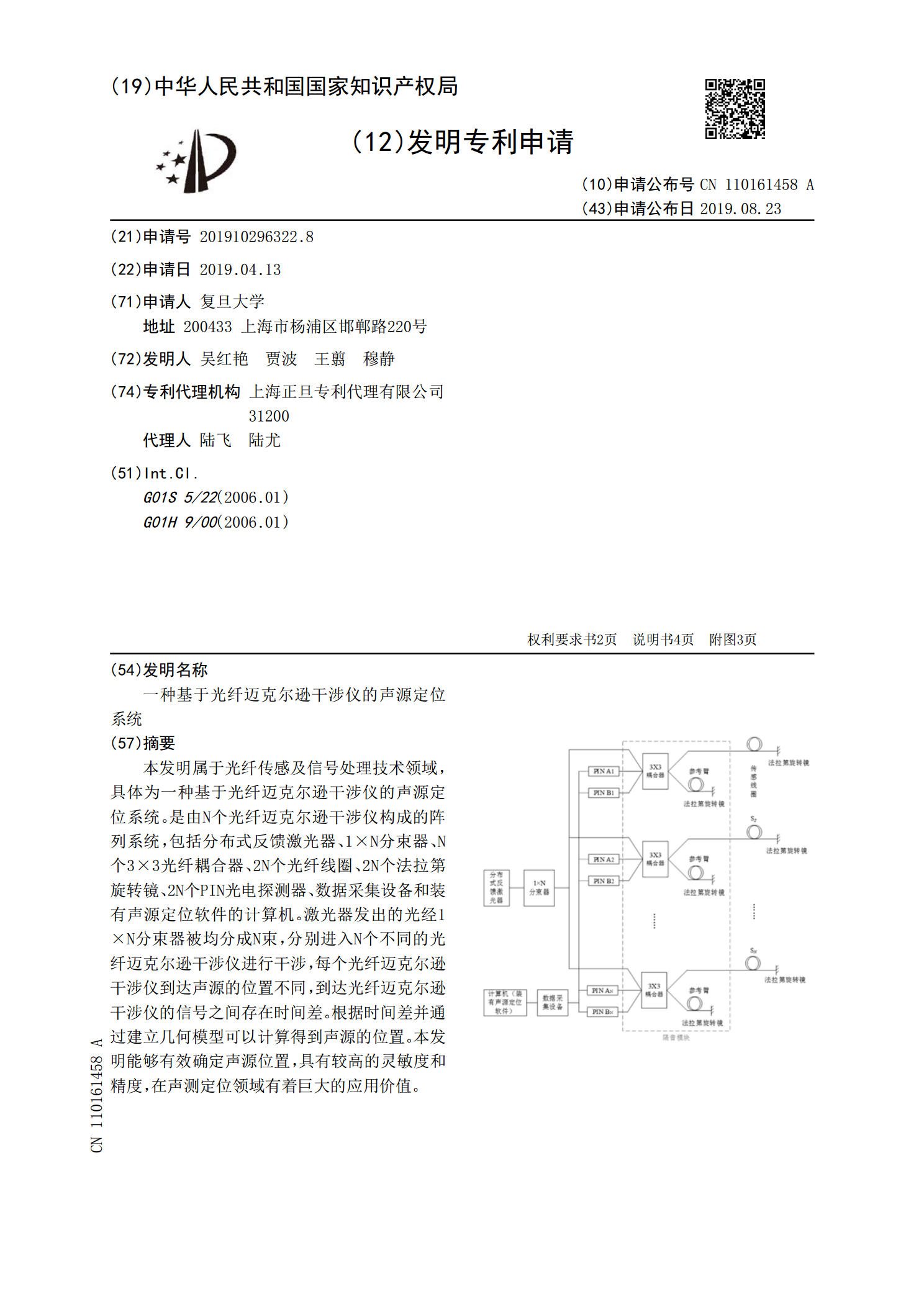
本发明属于光纤传感及信号处理技术领域,具体为一种基于光纤迈克尔逊干涉仪的声源定位系统。是由N个光纤迈克尔逊干涉仪构成的阵列系统,包括分布式反馈激光器、1×N分束器、N个3×3光纤耦合器、2N个光纤线圈、2N个法拉第旋转镜、2N个PIN光电探测器、数据采集设备和装有声源定位软件的计算机。激光器发出的光经1×N分束器被均分成N束,分别进入N个不同的光纤迈克尔逊干涉仪进行干涉,每个光纤迈克尔逊干涉仪到达声源的位置不同,到达光纤迈克尔逊干涉仪的信号之间存在时间差。根据时间差并通过建立几何模型可以计算得到声源的位置
一种基于双向迈克尔逊干涉仪的分布式光纤传感定位系统.pdf
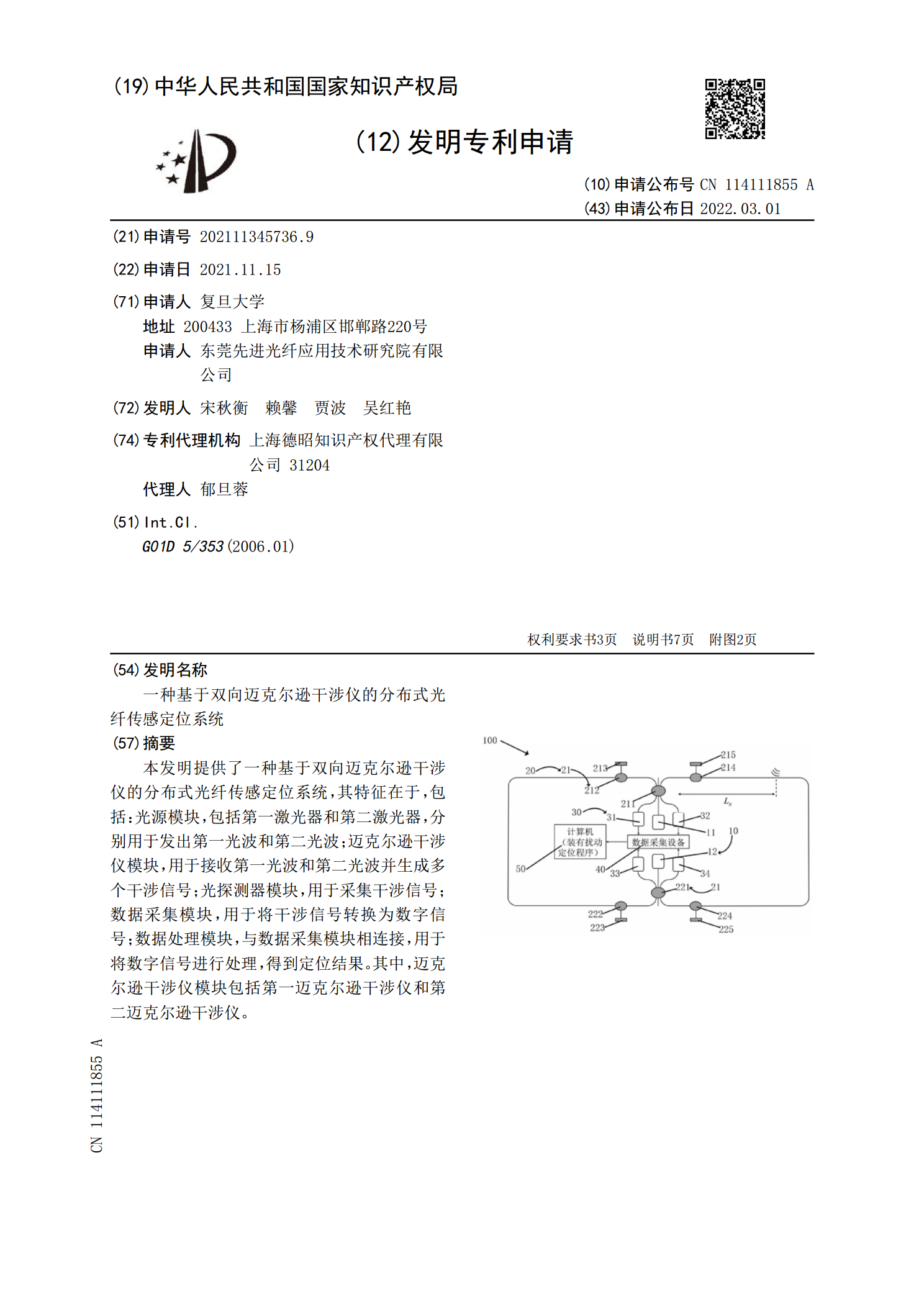
本发明提供了一种基于双向迈克尔逊干涉仪的分布式光纤传感定位系统,其特征在于,包括:光源模块,包括第一激光器和第二激光器,分别用于发出第一光波和第二光波;迈克尔逊干涉仪模块,用于接收第一光波和第二光波并生成多个干涉信号;光探测器模块,用于采集干涉信号;数据采集模块,用于将干涉信号转换为数字信号;数据处理模块,与数据采集模块相连接,用于将数字信号进行处理,得到定位结果。其中,迈克尔逊干涉仪模块包括第一迈克尔逊干涉仪和第二迈克尔逊干涉仪。

基于光纤传输的迈克尔逊干涉仪计数系统改进.docx
基于光纤传输的迈克尔逊干涉仪计数系统改进摘要:本文针对现有的基于光纤传输的迈克尔逊干涉仪计数系统进行了改进,增加了多功能控制模块、数据传输模块和图像处理模块,使得该系统能够实现更加准确和稳定的计数功能,同时也增强了系统的可操作性。通过实验验证,改进后的计数系统具有较高的精度和稳定性,在应用领域具有广泛的应用价值。关键词:光纤传输;迈克尔逊干涉仪计数系统;多功能控制模块;数据传输模块;图像处理模块一、绪论迈克尔逊干涉仪是一种用于测量长度和位移的重要仪器。由于其具有高度的灵敏度和精度,因此在制造、检测和精密测
一种基于全光纤迈克尔逊干涉仪的调谐装置.pdf
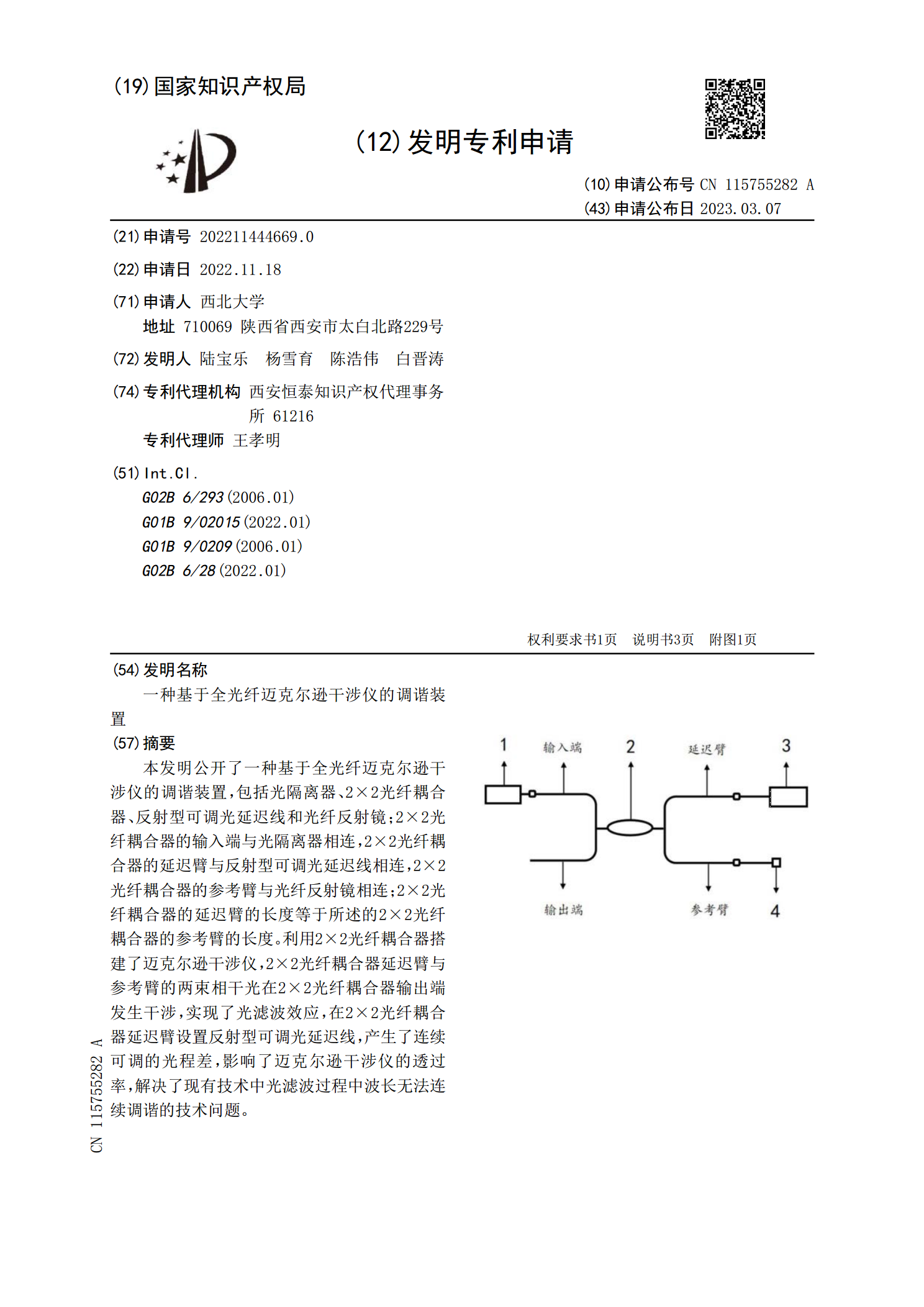
本发明公开了一种基于全光纤迈克尔逊干涉仪的调谐装置,包括光隔离器、2×2光纤耦合器、反射型可调光延迟线和光纤反射镜;2×2光纤耦合器的输入端与光隔离器相连,2×2光纤耦合器的延迟臂与反射型可调光延迟线相连,2×2光纤耦合器的参考臂与光纤反射镜相连;2×2光纤耦合器的延迟臂的长度等于所述的2×2光纤耦合器的参考臂的长度。利用2×2光纤耦合器搭建了迈克尔逊干涉仪,2×2光纤耦合器延迟臂与参考臂的两束相干光在2×2光纤耦合器输出端发生干涉,实现了光滤波效应,在2×2光纤耦合器延迟臂设置反射型可调光延迟线,产生了
一种基于双迈克尔逊干涉仪的光纤分布式扰动传感系统.pdf
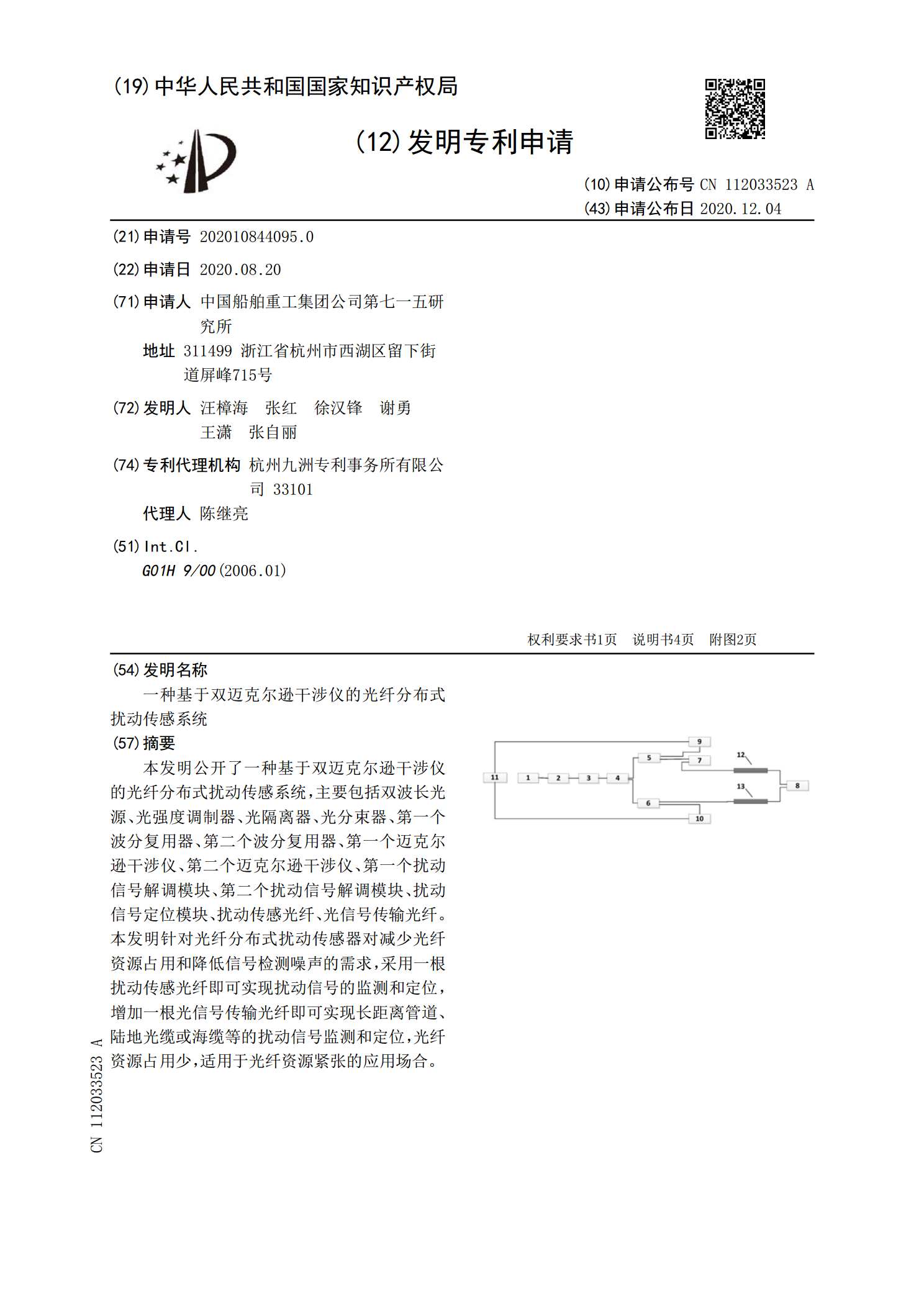
本发明公开了一种基于双迈克尔逊干涉仪的光纤分布式扰动传感系统,主要包括双波长光源、光强度调制器、光隔离器、光分束器、第一个波分复用器、第二个波分复用器、第一个迈克尔逊干涉仪、第二个迈克尔逊干涉仪、第一个扰动信号解调模块、第二个扰动信号解调模块、扰动信号定位模块、扰动传感光纤、光信号传输光纤。本发明针对光纤分布式扰动传感器对减少光纤资源占用和降低信号检测噪声的需求,采用一根扰动传感光纤即可实现扰动信号的监测和定位,增加一根光信号传输光纤即可实现长距离管道、陆地光缆或海缆等的扰动信号监测和定位,光纤资源占用少