
压缩打包机控制方法.pdf

和裕****az

1/10
2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
压缩打包机控制方法.pdf
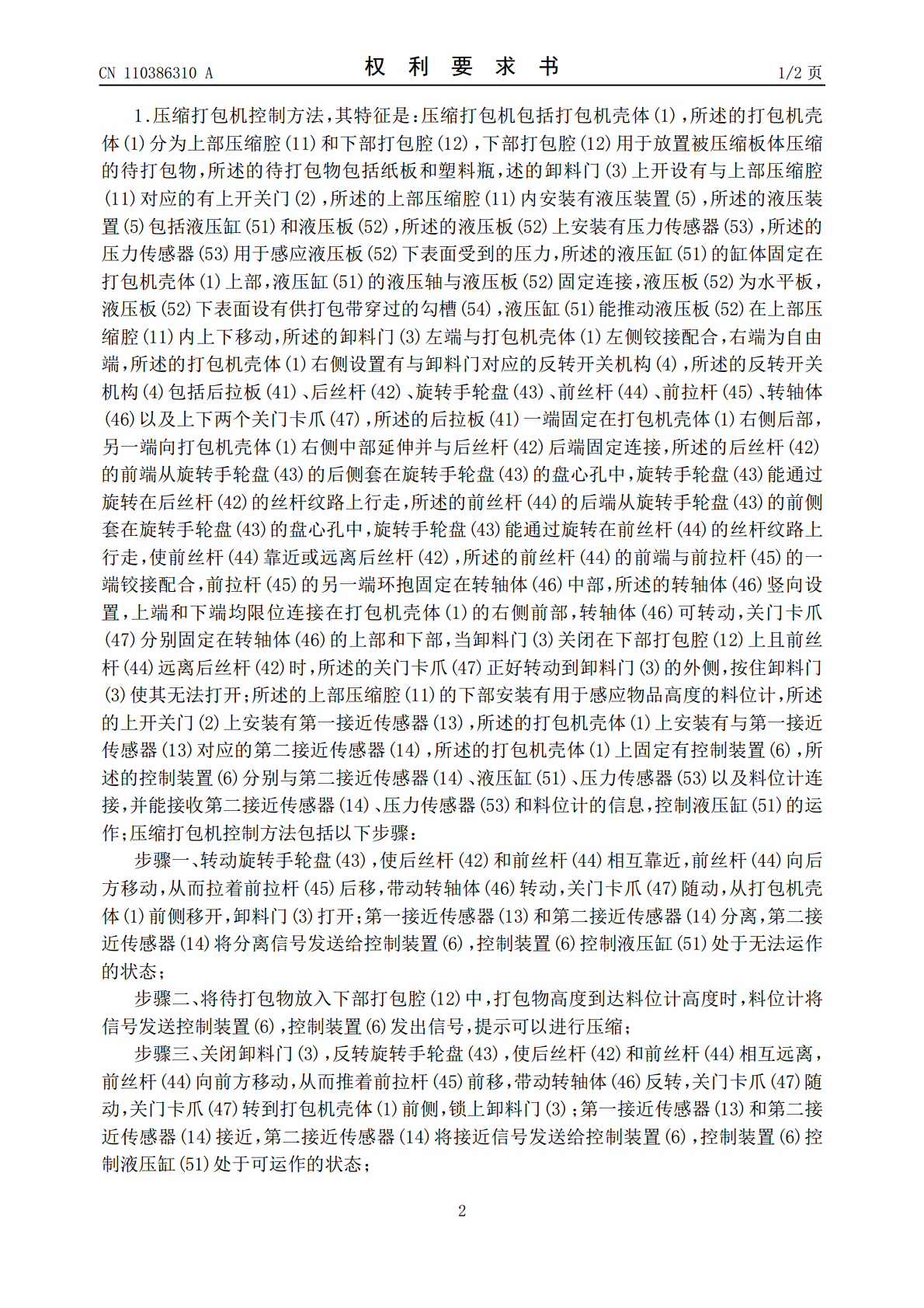
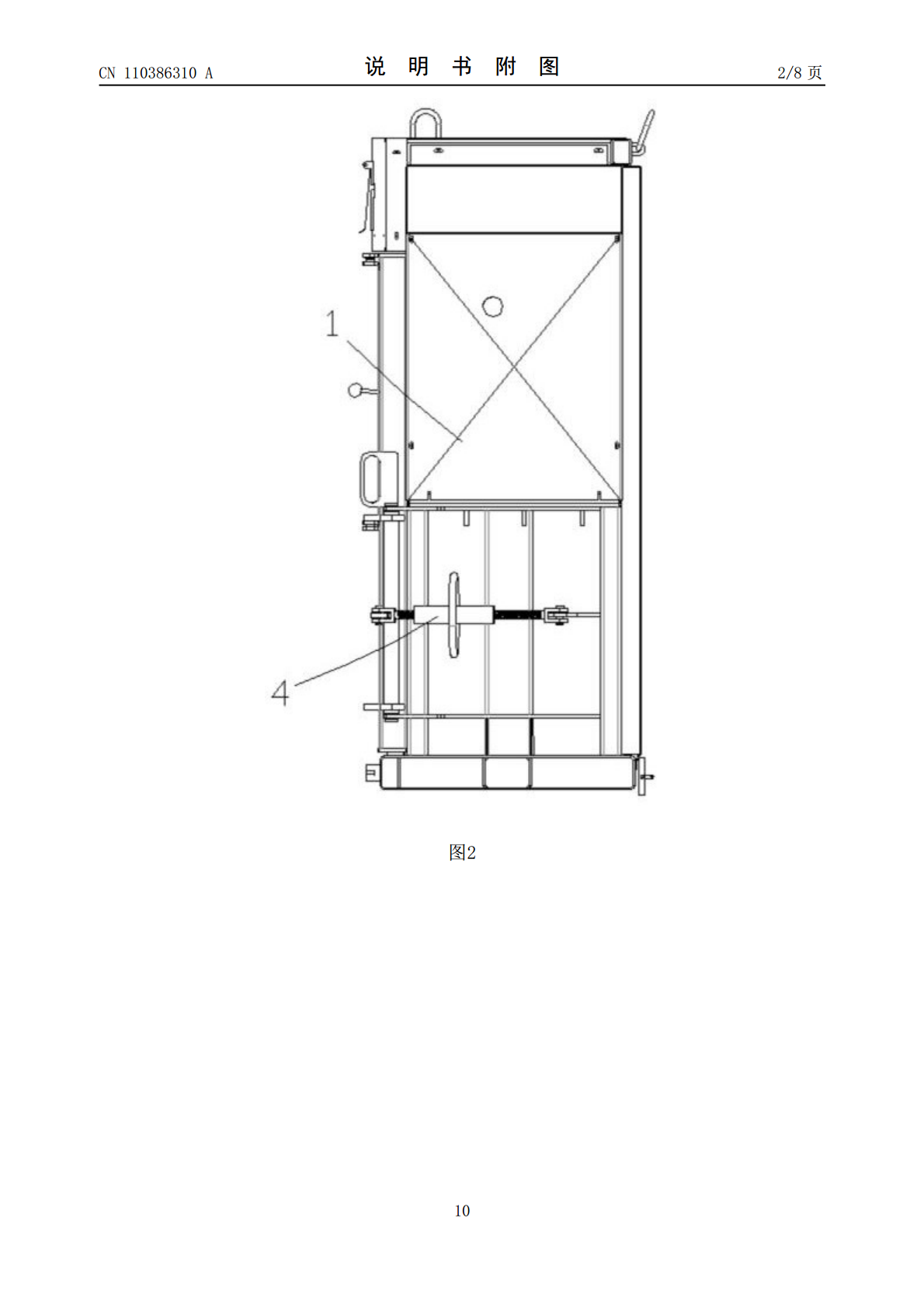
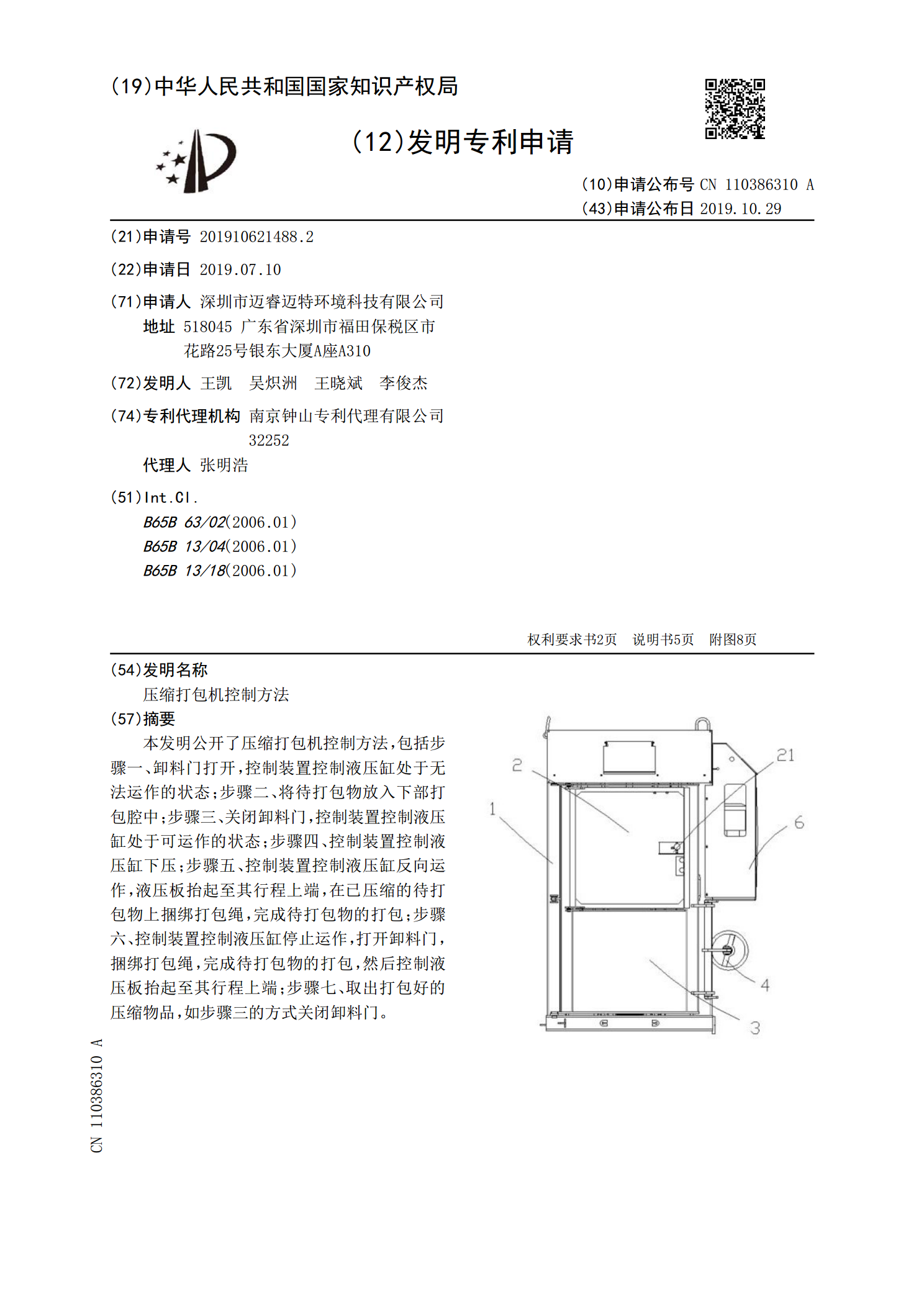
本发明公开了压缩打包机控制方法,包括步骤一、卸料门打开,控制装置控制液压缸处于无法运作的状态;步骤二、将待打包物放入下部打包腔中;步骤三、关闭卸料门,控制装置控制液压缸处于可运作的状态;步骤四、控制装置控制液压缸下压;步骤五、控制装置控制液压缸反向运作,液压板抬起至其行程上端,在已压缩的待打包物上捆绑打包绳,完成待打包物的打包;步骤六、控制装置控制液压缸停止运作,打开卸料门,捆绑打包绳,完成待打包物的打包,然后控制液压板抬起至其行程上端;步骤七、取出打包好的压缩物品,如步骤三的方式关闭卸料门。
蜗轮蜗杆压缩打包机械装置.pdf
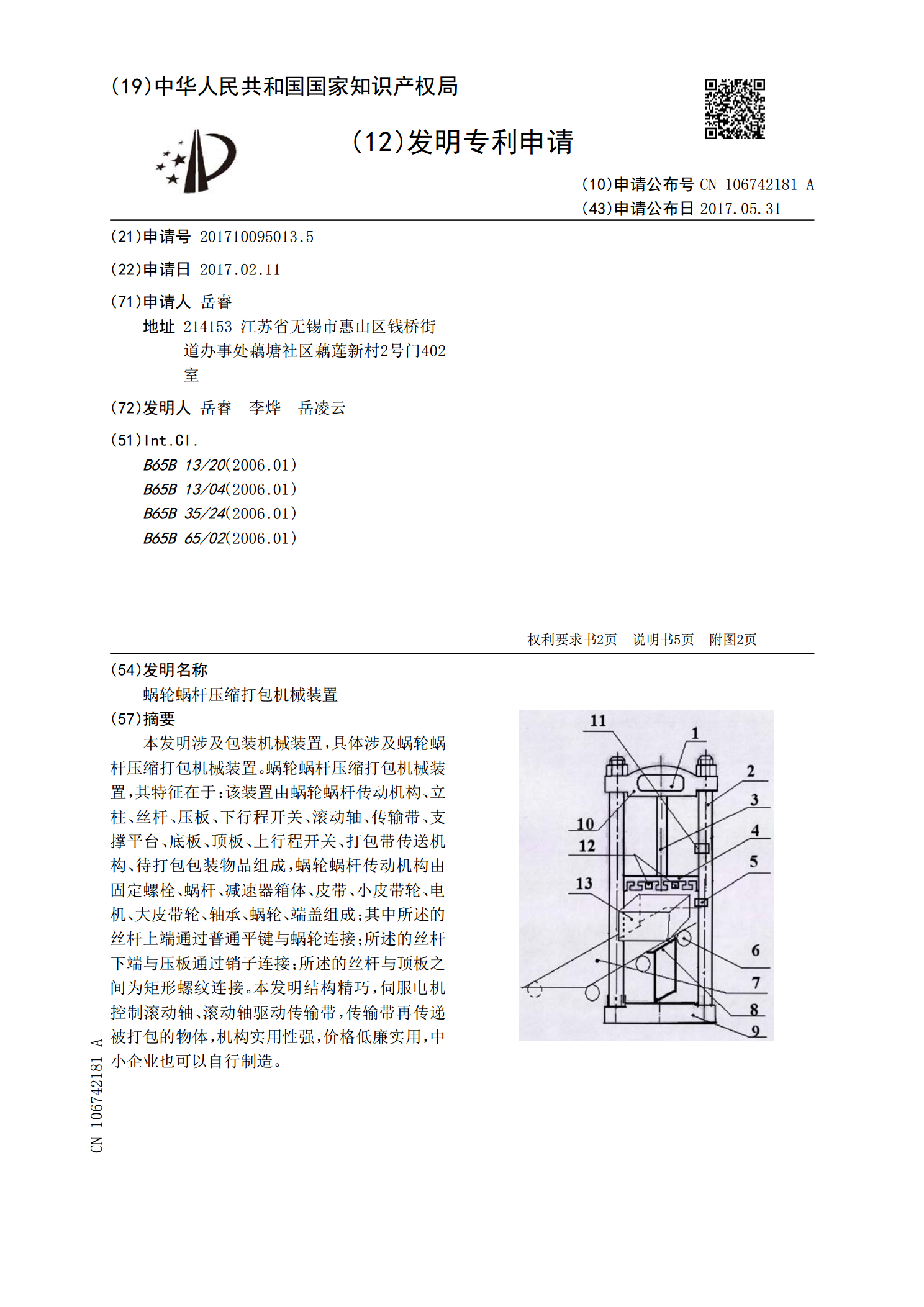
本发明涉及包装机械装置,具体涉及蜗轮蜗杆压缩打包机械装置。蜗轮蜗杆压缩打包机械装置,其特征在于:该装置由蜗轮蜗杆传动机构、立柱、丝杆、压板、下行程开关、滚动轴、传输带、支撑平台、底板、顶板、上行程开关、打包带传送机构、待打包包装物品组成,蜗轮蜗杆传动机构由固定螺栓、蜗杆、减速器箱体、皮带、小皮带轮、电机、大皮带轮、轴承、蜗轮、端盖组成;其中所述的丝杆上端通过普通平键与蜗轮连接;所述的丝杆下端与压板通过销子连接;所述的丝杆与顶板之间为矩形螺纹连接。本发明结构精巧,伺服电机控制滚动轴、滚动轴驱动传输带,传输带

一种服装压缩打包机.pdf
本发明提供一种服装压缩打包机,包括底座,所述底座的内部开设有收纳槽,所述收纳槽的内部固定安装有两个固定板,所述收纳槽内腔的左右两侧均固定安装有第一电机,所述第一电机底部的输出端固定连接有第一锥形齿轮,所述收纳槽的底部固定安装有螺纹杆,所述螺纹杆的表面套设有第二锥形齿轮,所述第一锥形齿轮与第二锥形齿轮啮合,所述螺纹杆的内侧啮合有转轴齿轮,所述转轴齿轮的内侧啮合有齿轮板,所述固定板的左侧开设有滑槽。该服装压缩打包机,通过服装铺平居中放置在底板和翻折板的顶部,然后将两侧的翻折板向内将包装膜进行折叠,使得宽大的服
垃圾打包机的智能控制方法、垃圾打包机及存储介质.pdf
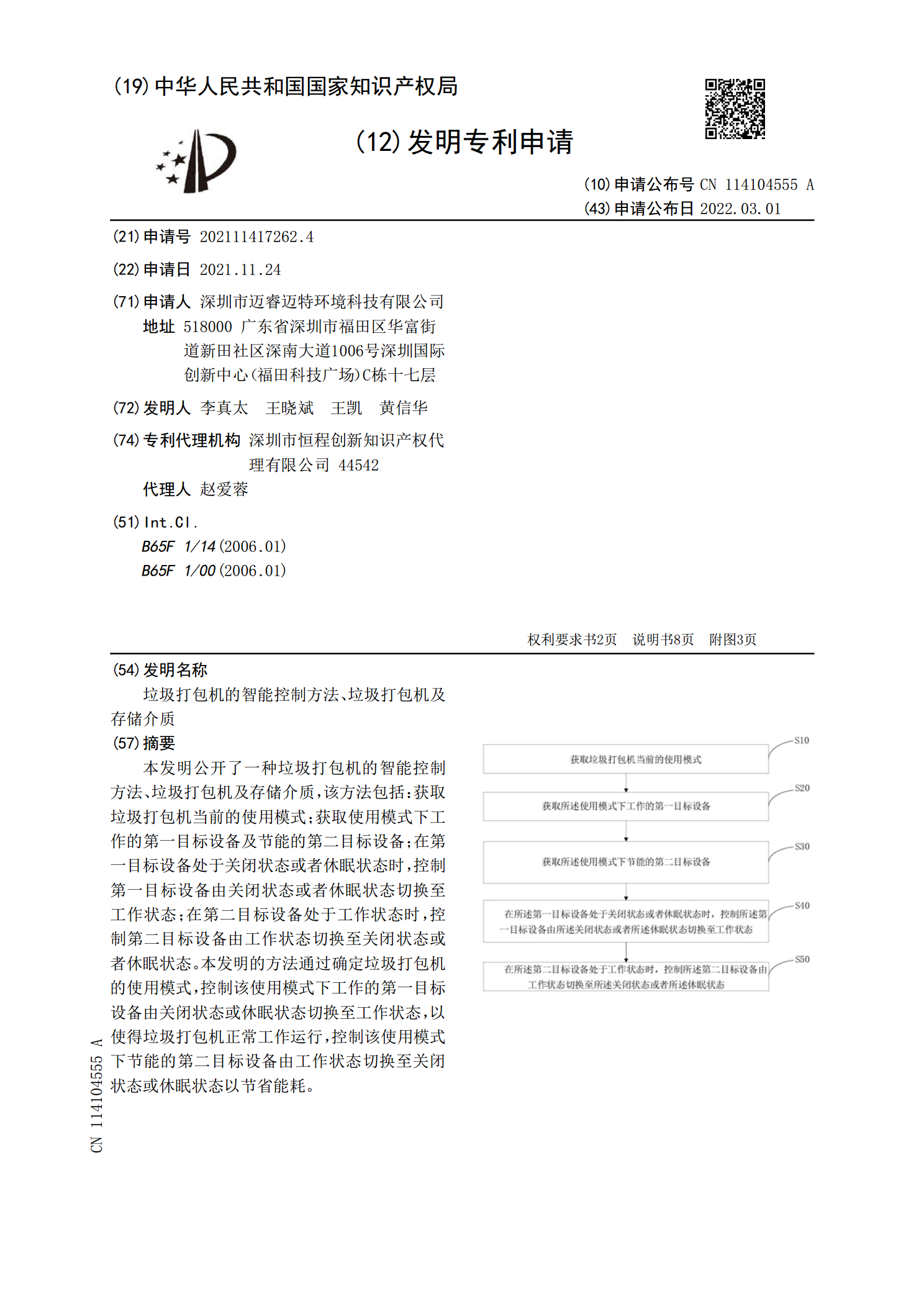
本发明公开了一种垃圾打包机的智能控制方法、垃圾打包机及存储介质,该方法包括:获取垃圾打包机当前的使用模式;获取使用模式下工作的第一目标设备及节能的第二目标设备;在第一目标设备处于关闭状态或者休眠状态时,控制第一目标设备由关闭状态或者休眠状态切换至工作状态;在第二目标设备处于工作状态时,控制第二目标设备由工作状态切换至关闭状态或者休眠状态。本发明的方法通过确定垃圾打包机的使用模式,控制该使用模式下工作的第一目标设备由关闭状态或休眠状态切换至工作状态,以使得垃圾打包机正常工作运行,控制该使用模式下节能的第二目
一种双气缸压缩打包机.pdf
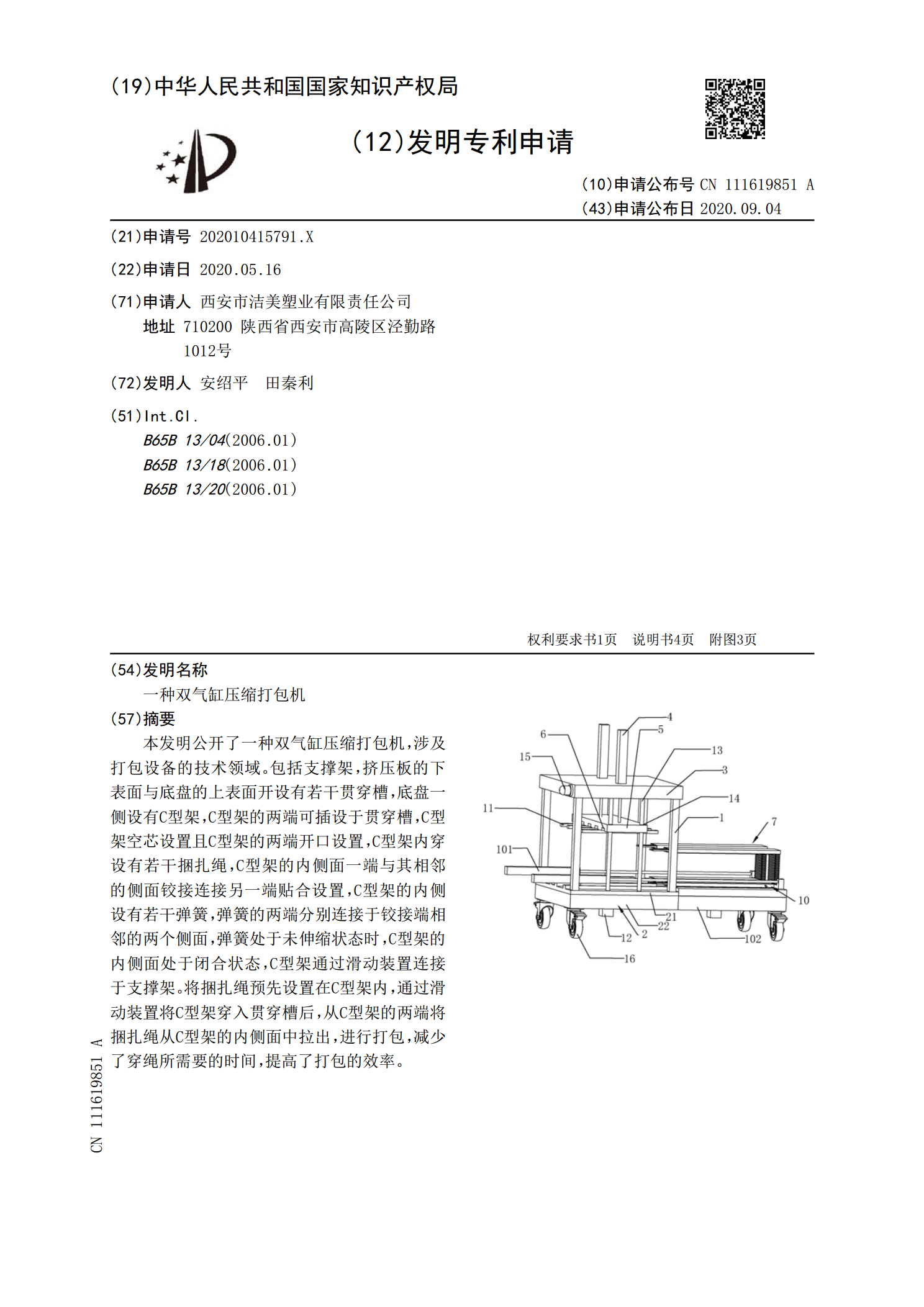
本发明公开了一种双气缸压缩打包机,涉及打包设备的技术领域。包括支撑架,挤压板的下表面与底盘的上表面开设有若干贯穿槽,底盘一侧设有C型架,C型架的两端可插设于贯穿槽,C型架空芯设置且C型架的两端开口设置,C型架内穿设有若干捆扎绳,C型架的内侧面一端与其相邻的侧面铰接连接另一端贴合设置,C型架的内侧设有若干弹簧,弹簧的两端分别连接于铰接端相邻的两个侧面,弹簧处于未伸缩状态时,C型架的内侧面处于闭合状态,C型架通过滑动装置连接于支撑架。将捆扎绳预先设置在C型架内,通过滑动装置将C型架穿入贯穿槽后,从C型架的两端