
光纤迈克尔逊干涉测振仪非线性误差修正方法.pdf

一吃****继勇

1/10
2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
光纤迈克尔逊干涉测振仪非线性误差修正方法.pdf
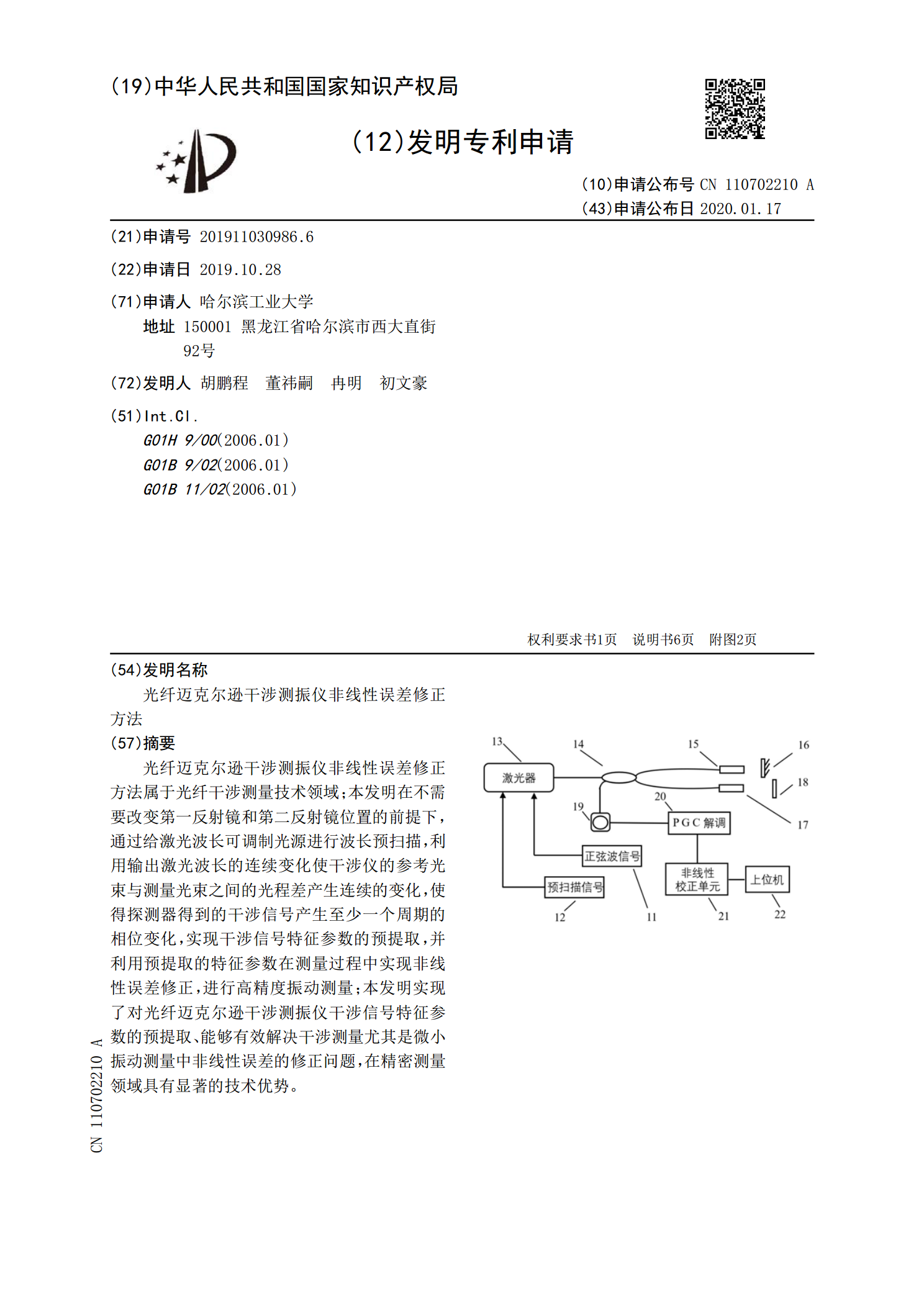
光纤迈克尔逊干涉测振仪非线性误差修正方法属于光纤干涉测量技术领域;本发明在不需要改变第一反射镜和第二反射镜位置的前提下,通过给激光波长可调制光源进行波长预扫描,利用输出激光波长的连续变化使干涉仪的参考光束与测量光束之间的光程差产生连续的变化,使得探测器得到的干涉信号产生至少一个周期的相位变化,实现干涉信号特征参数的预提取,并利用预提取的特征参数在测量过程中实现非线性误差修正,进行高精度振动测量;本发明实现了对光纤迈克尔逊干涉测振仪干涉信号特征参数的预提取、能够有效解决干涉测量尤其是微小振动测量中非线性误差

光纤迈克尔逊干涉仪非线性误差修正方法.pdf
光纤迈克尔逊干涉仪非线性误差修正方法属于光纤干涉测量技术领域;本发明在不需要改变第一反射镜和第二反射镜位置的前提下,通过给激光波长可调制光源进行波长预扫描,利用输出激光波长的连续变化使干涉仪的参考光束与测量光束之间的光程差产生连续的变化,使得探测器得到的干涉信号产生至少一个周期的相位变化,实现干涉信号特征参数的预提取,并利用预提取的特征参数在测量过程中实现非线性误差修正,进行高精度位移测量;本发明实现了对光纤迈克尔逊干涉仪干涉信号特征参数的预提取、能够有效解决干涉测量尤其是微小位移测量中非线性误差的修正问
迈克尔逊干涉仪虚拟仿真系统及迈克尔逊干涉实验方法.pdf
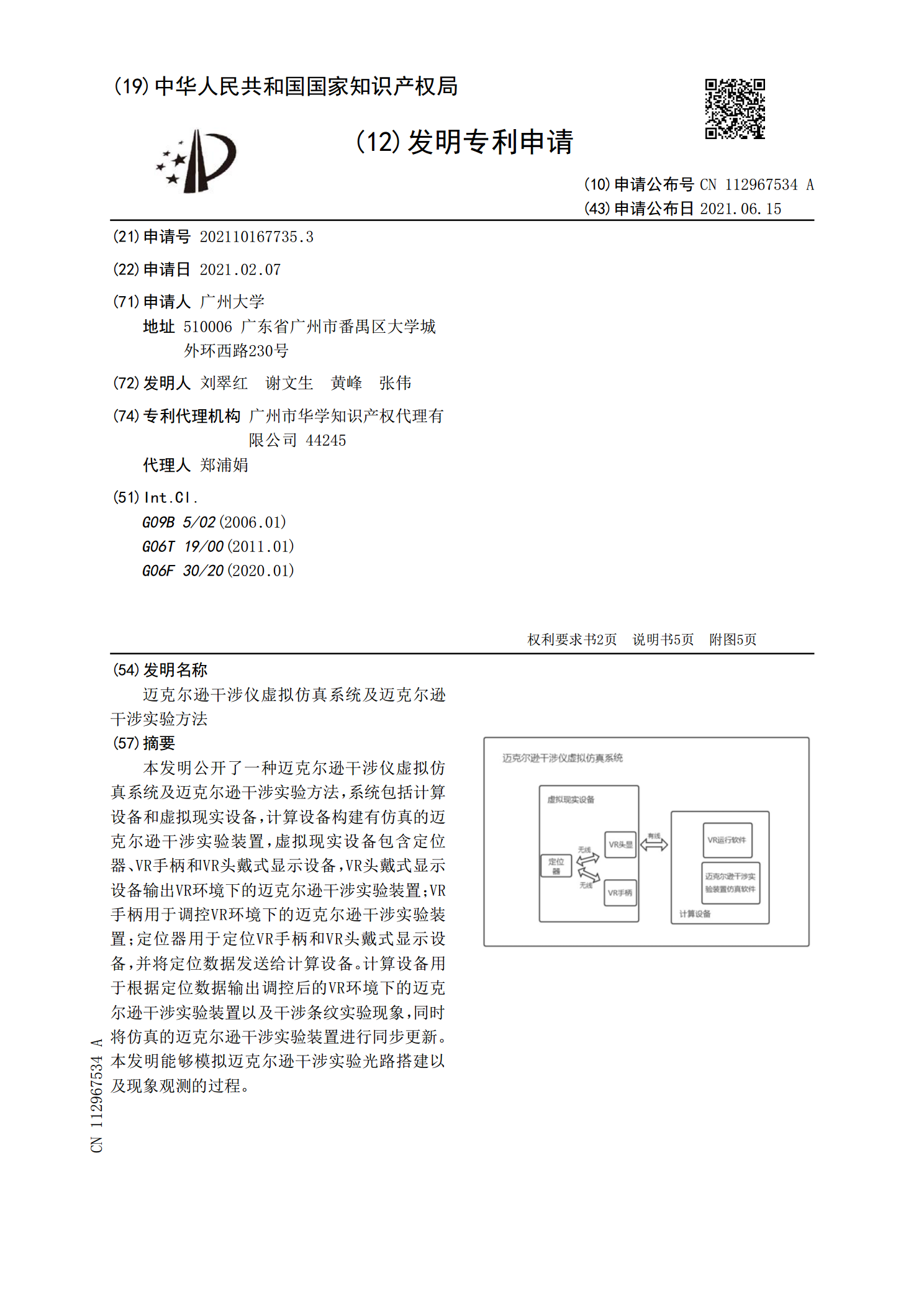
本发明公开了一种迈克尔逊干涉仪虚拟仿真系统及迈克尔逊干涉实验方法,系统包括计算设备和虚拟现实设备,计算设备构建有仿真的迈克尔逊干涉实验装置,虚拟现实设备包含定位器、VR手柄和VR头戴式显示设备,VR头戴式显示设备输出VR环境下的迈克尔逊干涉实验装置;VR手柄用于调控VR环境下的迈克尔逊干涉实验装置;定位器用于定位VR手柄和VR头戴式显示设备,并将定位数据发送给计算设备。计算设备用于根据定位数据输出调控后的VR环境下的迈克尔逊干涉实验装置以及干涉条纹实验现象,同时将仿真的迈克尔逊干涉实验装置进行同步更新。本

迈克尔逊干涉仪实验相对误差的探索.docx
迈克尔逊干涉仪实验相对误差的探索迈克尔逊干涉仪实验相对误差的探索摘要:迈克尔逊干涉仪是一种经典的光学实验仪器,通过测量干涉条纹的移动来分析被测物体的参数。然而,在实际应用中,干涉仪的精确度和稳定性往往会受到各种误差的影响,导致测量结果的不确定性。本文通过实验探索了迈克尔逊干涉仪实验中的相对误差,并提出了一些减小误差的方法。1.引言迈克尔逊干涉仪是一种基于干涉原理的光学测量仪器,由美国物理学家迈克尔逊于1887年发明。其基本原理是通过将一个光束分成两个相干光束,并使其遵循不同的路径后再次合成,通过干涉现象来

迈克尔逊干涉仪实验报告,误差分析.pdf
迈克尔逊干涉仪实验报告,误差分析物理实验迈克尔逊干涉仪实验误差分析及结果讨论实验总结:1.在实际测量中,出现了一下情况:随测量次数的增多,圆心位置发生了变化,这种现象是与理论相悖的,原因是由于M1与M2’未达到完全平行或调整仪器时未调整好,而且圆心偏移速度越快越说明M1与M2’平行度越差。2.在测量完第一组数据后,反向旋转时会在旋转相当多圈后才会出现中心圆环的由吞吐变吐,这个转变不是立即就完成的,这是因为仪器右侧的旋钮为微调旋钮,使用它对干涉仪的性质改变影响较小,故有吞变吐需要旋转相当一段时间,此时应旋转