
充电桩定位方法、装置、计算机设备和存储介质.pdf

一只****iu


1/10
2/10
3/10

4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
充电桩定位方法、装置、计算机设备和存储介质.pdf
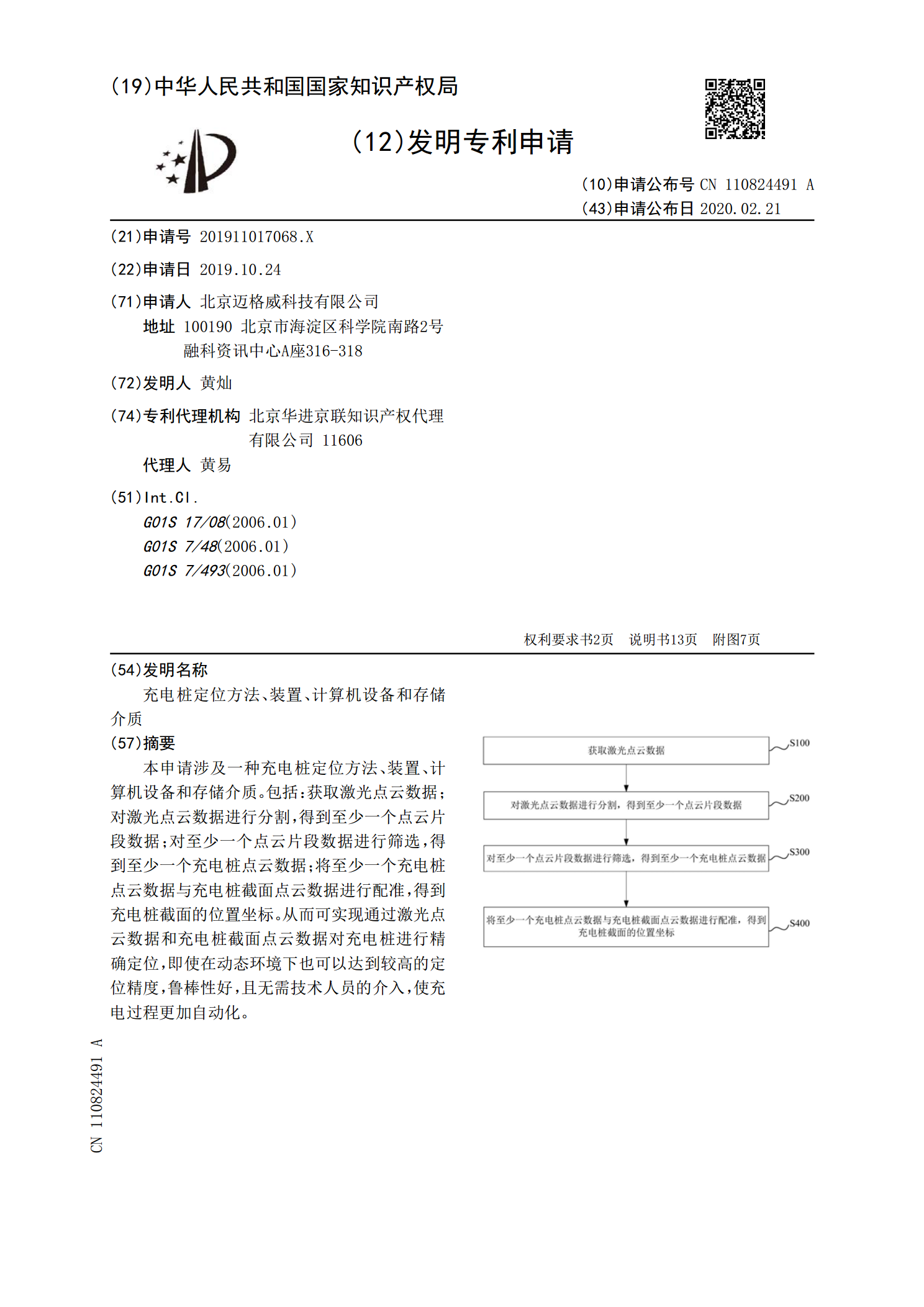
本申请涉及一种充电桩定位方法、装置、计算机设备和存储介质。包括:获取激光点云数据;对激光点云数据进行分割,得到至少一个点云片段数据;对至少一个点云片段数据进行筛选,得到至少一个充电桩点云数据;将至少一个充电桩点云数据与充电桩截面点云数据进行配准,得到充电桩截面的位置坐标。从而可实现通过激光点云数据和充电桩截面点云数据对充电桩进行精确定位,即使在动态环境下也可以达到较高的定位精度,鲁棒性好,且无需技术人员的介入,使充电过程更加自动化。

充电桩充电保护方法、装置、计算机设备和存储介质.pdf
本申请涉及一种充电桩充电保护方法、装置、计算机设备和存储介质。所述方法包括:获取目标区域内各用电单元的当前用电负荷;其中,用电单元包括楼宇用电单元和充电桩用电单元;获取各用电单元的预设用电阈值;在监测到存在当前用电负荷超过预设用电阈值的目标用电单元时,向充电桩平台发送充电保护指令;其中,充电保护指令用于指示充电桩平台降低充电桩用电单元的当前输出功率。采用本方法能够提高目标区域内充电桩充电的安全性。
充电桩选址方法、装置、设备及存储介质.pdf
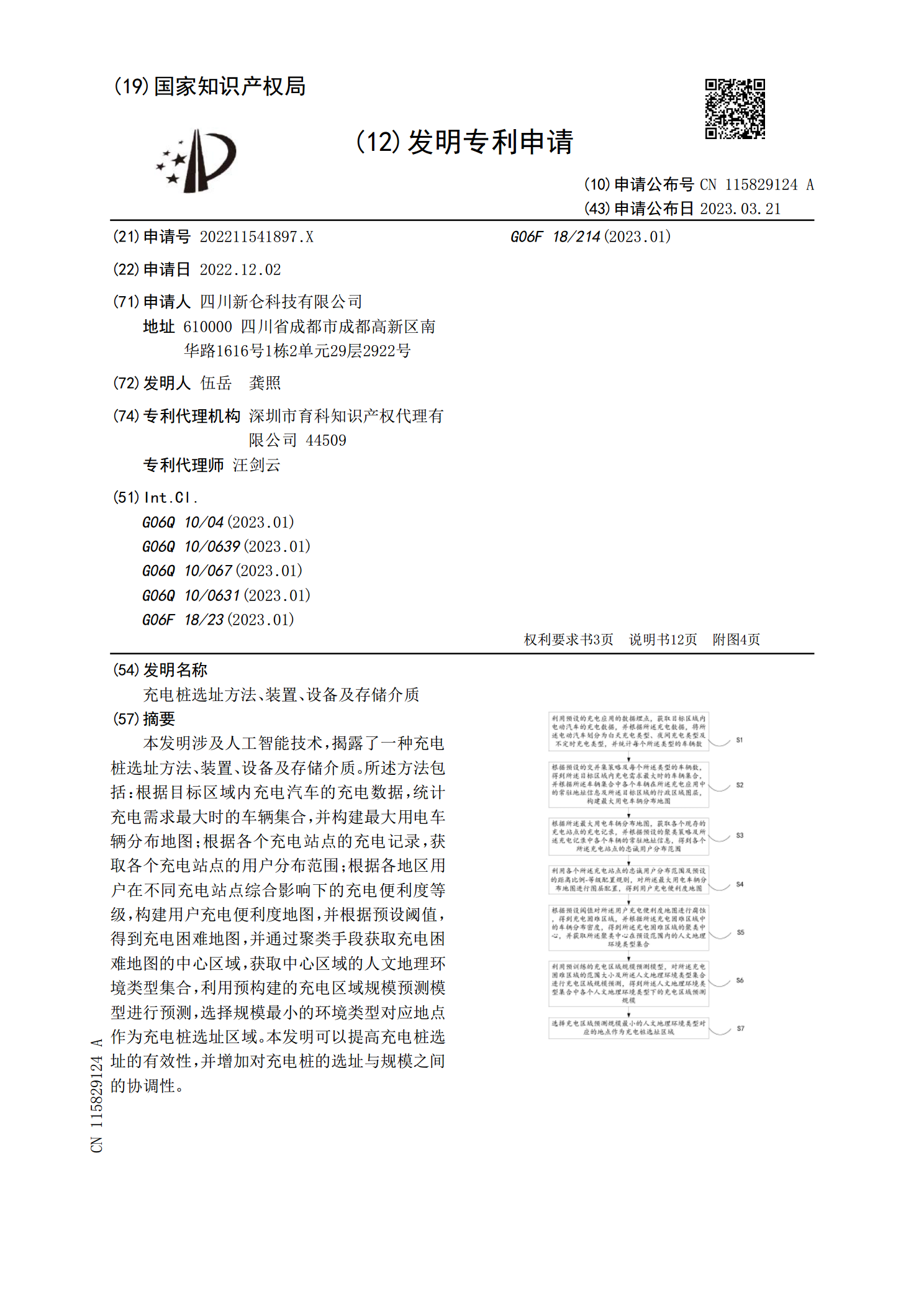
本发明涉及人工智能技术,揭露了一种充电桩选址方法、装置、设备及存储介质。所述方法包括:根据目标区域内充电汽车的充电数据,统计充电需求最大时的车辆集合,并构建最大用电车辆分布地图;根据各个充电站点的充电记录,获取各个充电站点的用户分布范围;根据各地区用户在不同充电站点综合影响下的充电便利度等级,构建用户充电便利度地图,并根据预设阈值,得到充电困难地图,并通过聚类手段获取充电困难地图的中心区域,获取中心区域的人文地理环境类型集合,利用预构建的充电区域规模预测模型进行预测,选择规模最小的环境类型对应地点作为充电
充电桩充电方法、装置、服务器和存储介质.pdf
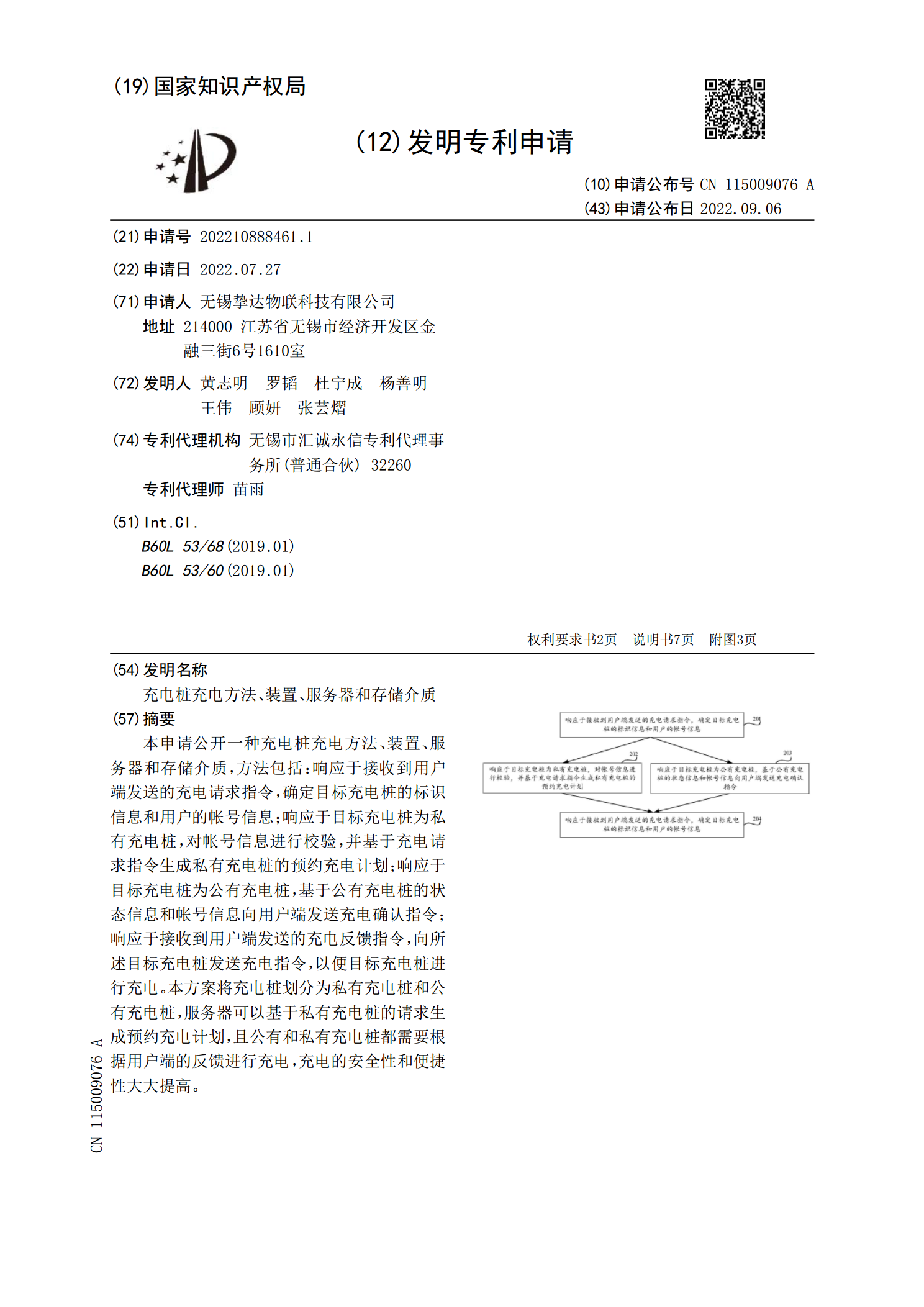
本申请公开一种充电桩充电方法、装置、服务器和存储介质,方法包括:响应于接收到用户端发送的充电请求指令,确定目标充电桩的标识信息和用户的帐号信息;响应于目标充电桩为私有充电桩,对帐号信息进行校验,并基于充电请求指令生成私有充电桩的预约充电计划;响应于目标充电桩为公有充电桩,基于公有充电桩的状态信息和帐号信息向用户端发送充电确认指令;响应于接收到用户端发送的充电反馈指令,向所述目标充电桩发送充电指令,以便目标充电桩进行充电。本方案将充电桩划分为私有充电桩和公有充电桩,服务器可以基于私有充电桩的请求生成预约充电

充电桩启动控制方法、装置、设备及存储介质.pdf
本发明公开了一种充电桩启动控制方法、装置、设备及存储介质,充电桩的本体上设置有通风口,通风口上设有角度可调整的闭合装置,该方法包括:在充电桩与车辆之间的充电连接建立完成时,获取充电桩的内部温度;在内部温度小于或等于加热温度阈值时,控制闭合装置将通风口关闭,以在充电桩内形成密闭空间;通过充电桩的内阻产生的热量对密闭空间进行加热,并在密闭空间内的温度大于或等于充电温度阈值时,控制闭合装置将所述通风口打开。通过调节闭合装置的角度和充电桩的内阻即可实现充电桩的低温启动,无需在充电桩内部增设加热装置,在实现充电桩低