
一种超声诊断仪及超声诊断仪手臂助力装置.pdf

是湛****21

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种超声诊断仪及超声诊断仪手臂助力装置.pdf
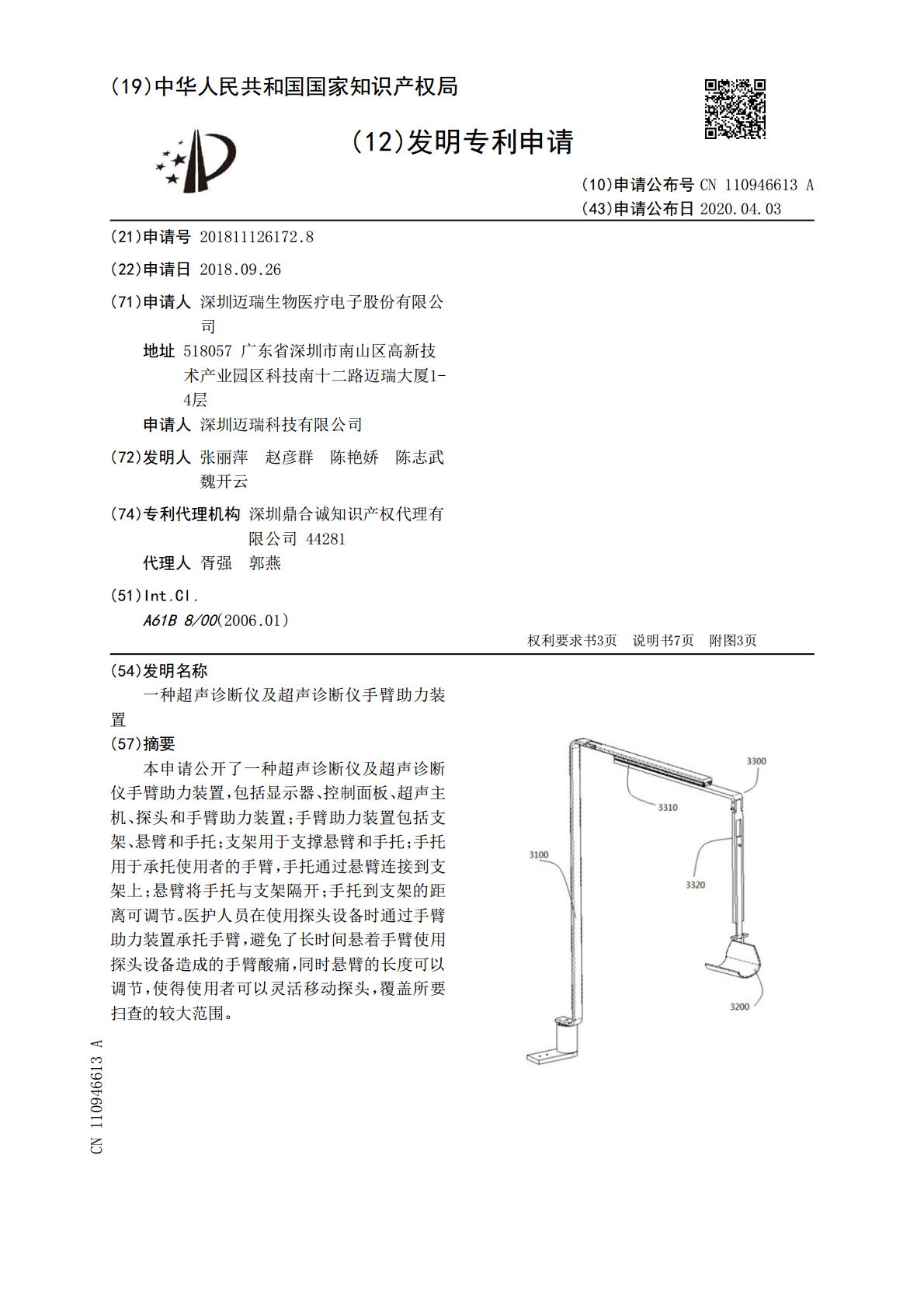
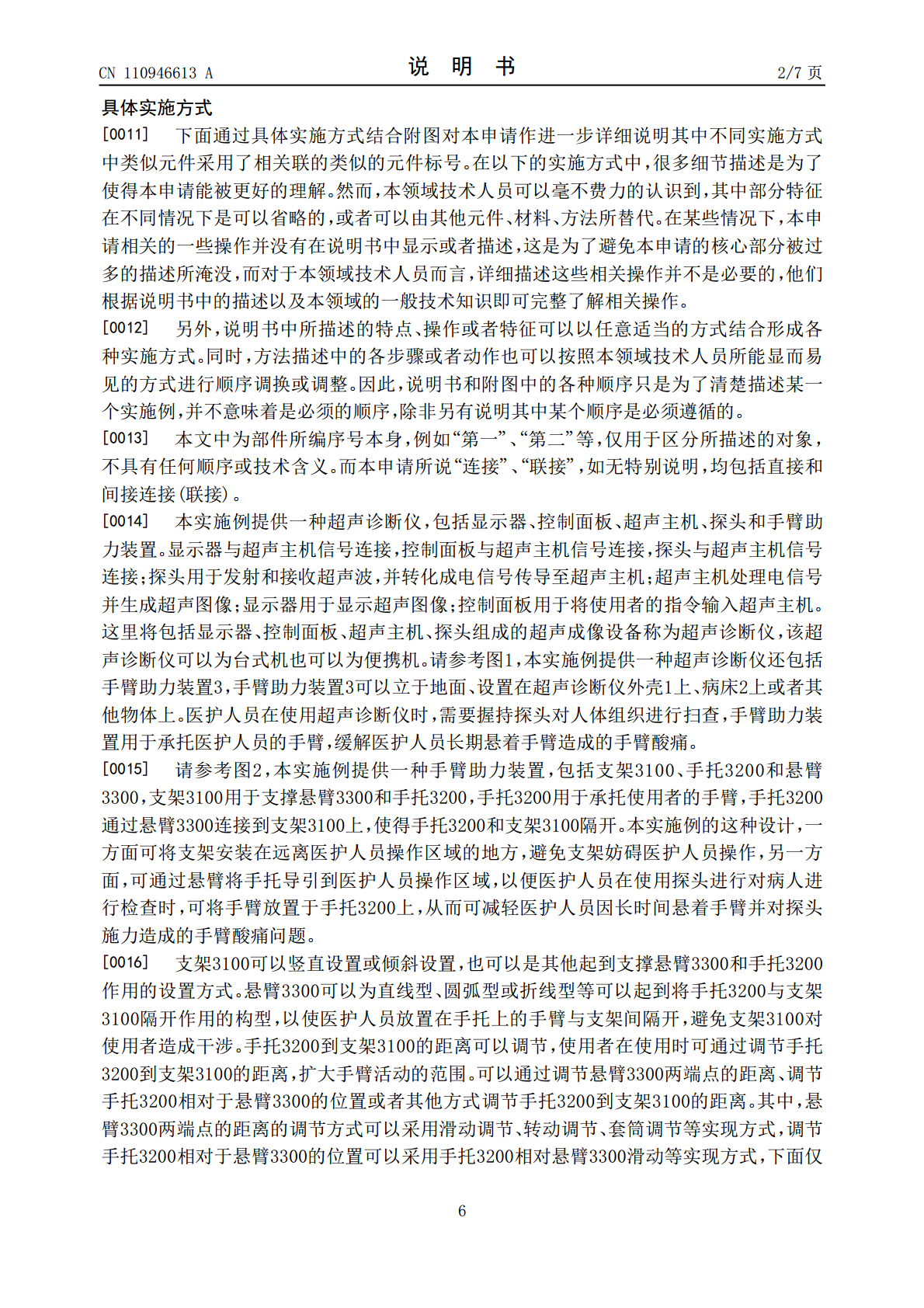
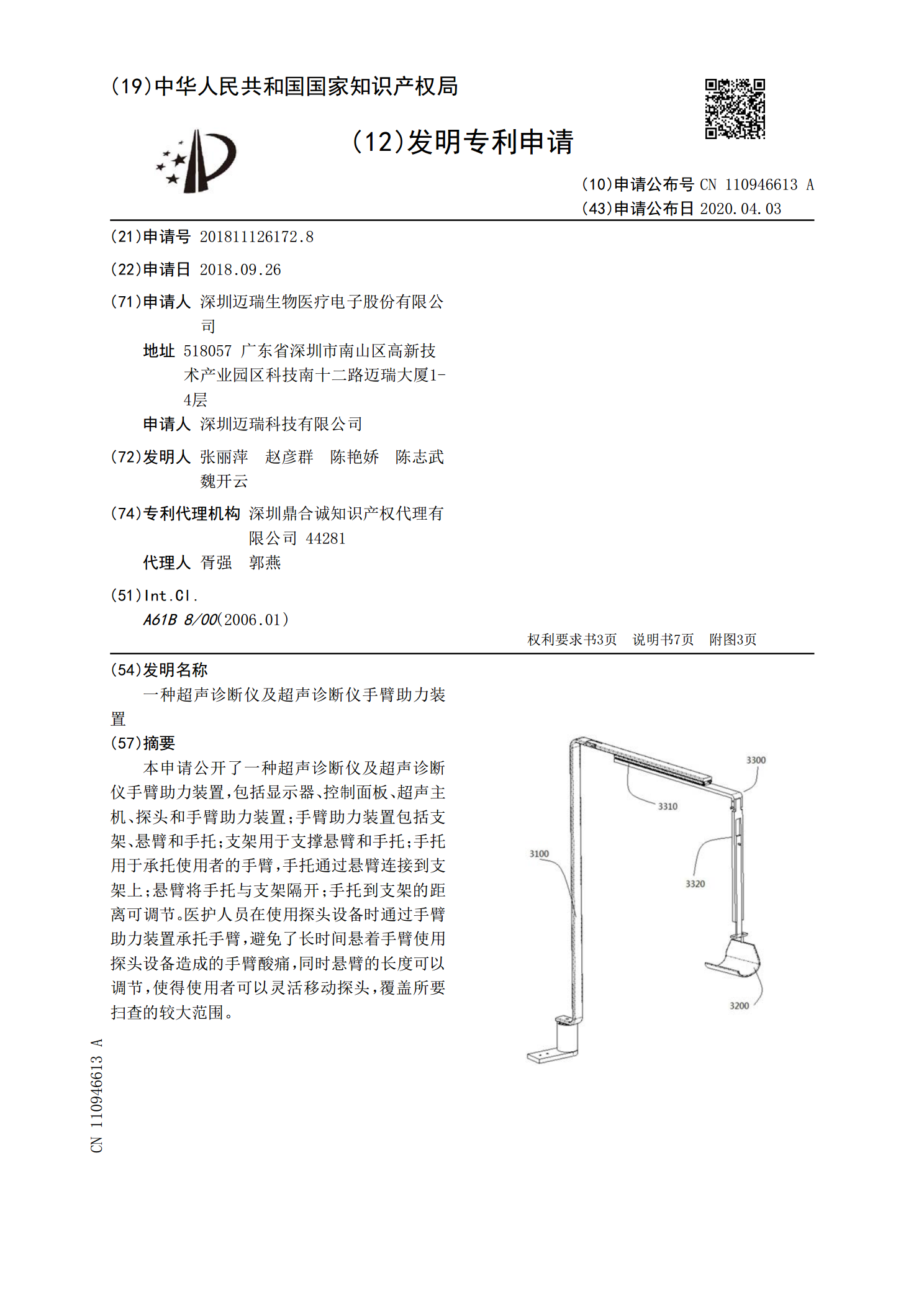
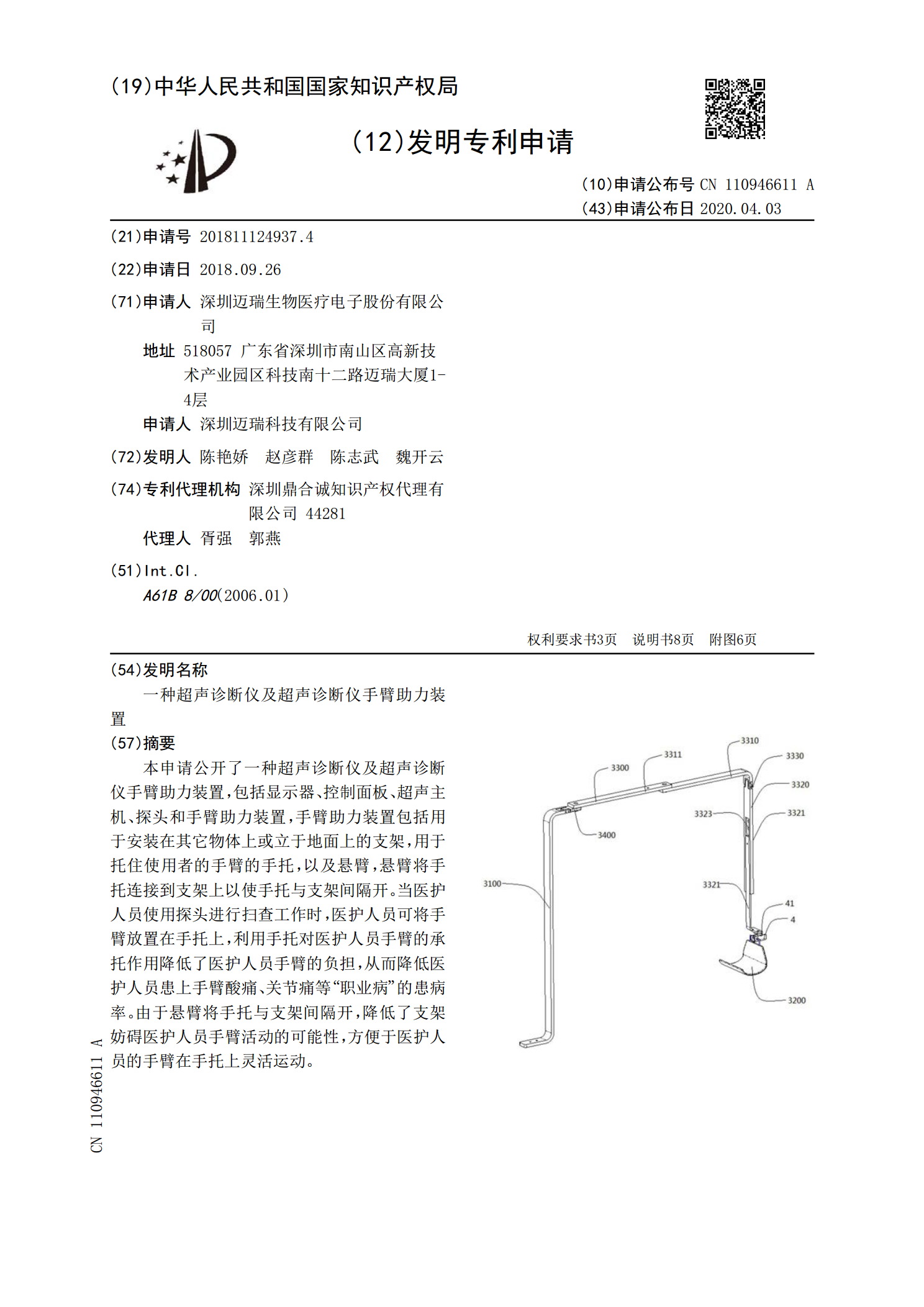
本申请公开了一种超声诊断仪及超声诊断仪手臂助力装置,包括显示器、控制面板、超声主机、探头和手臂助力装置;手臂助力装置包括支架、悬臂和手托;支架用于支撑悬臂和手托;手托用于承托使用者的手臂,手托通过悬臂连接到支架上;悬臂将手托与支架隔开;手托到支架的距离可调节。医护人员在使用探头设备时通过手臂助力装置承托手臂,避免了长时间悬着手臂使用探头设备造成的手臂酸痛,同时悬臂的长度可以调节,使得使用者可以灵活移动探头,覆盖所要扫查的较大范围。
一种超声诊断仪及超声诊断仪手臂助力装置.pdf
本申请公开了一种超声诊断仪及超声诊断仪手臂助力装置,包括显示器、控制面板、超声主机、探头和手臂助力装置,手臂助力装置包括用于安装在其它物体上或立于地面上的支架,用于托住使用者的手臂的手托,以及悬臂,悬臂将手托连接到支架上以使手托与支架间隔开。当医护人员使用探头进行扫查工作时,医护人员可将手臂放置在手托上,利用手托对医护人员手臂的承托作用降低了医护人员手臂的负担,从而降低医护人员患上手臂酸痛、关节痛等“职业病”的患病率。由于悬臂将手托与支架间隔开,降低了支架妨碍医护人员手臂活动的可能性,方便于医护人员的手臂

一种超声诊断仪、超声诊断仪的数据记录方法及装置.pdf
本发明公开一种超声诊断仪、超声诊断仪的数据记录方法及装置,所述方法包括:预先生成超声检查数据表格;依次响应于接收到的数据留存快捷键的触发信号,依次启动存储超声检查测量值的功能,并依次将显示在所述显示器上的超声检查测量值记录到所述超声检查数据表格对应的数据备用区单元格,形成第二超声检查数据表格;响应于接收到的数据箱快捷键的触发信号,提取所述第二超声检查数据表格;响应于确认指令,将所有数据备用区单元格中的超声检查数据迁移到对应的测量值单元格,形成第三超声检查数据表格。本发明能够为超声医师提供的集中式的超声检查
超声诊断仪波束发射方法及超声诊断仪.pdf
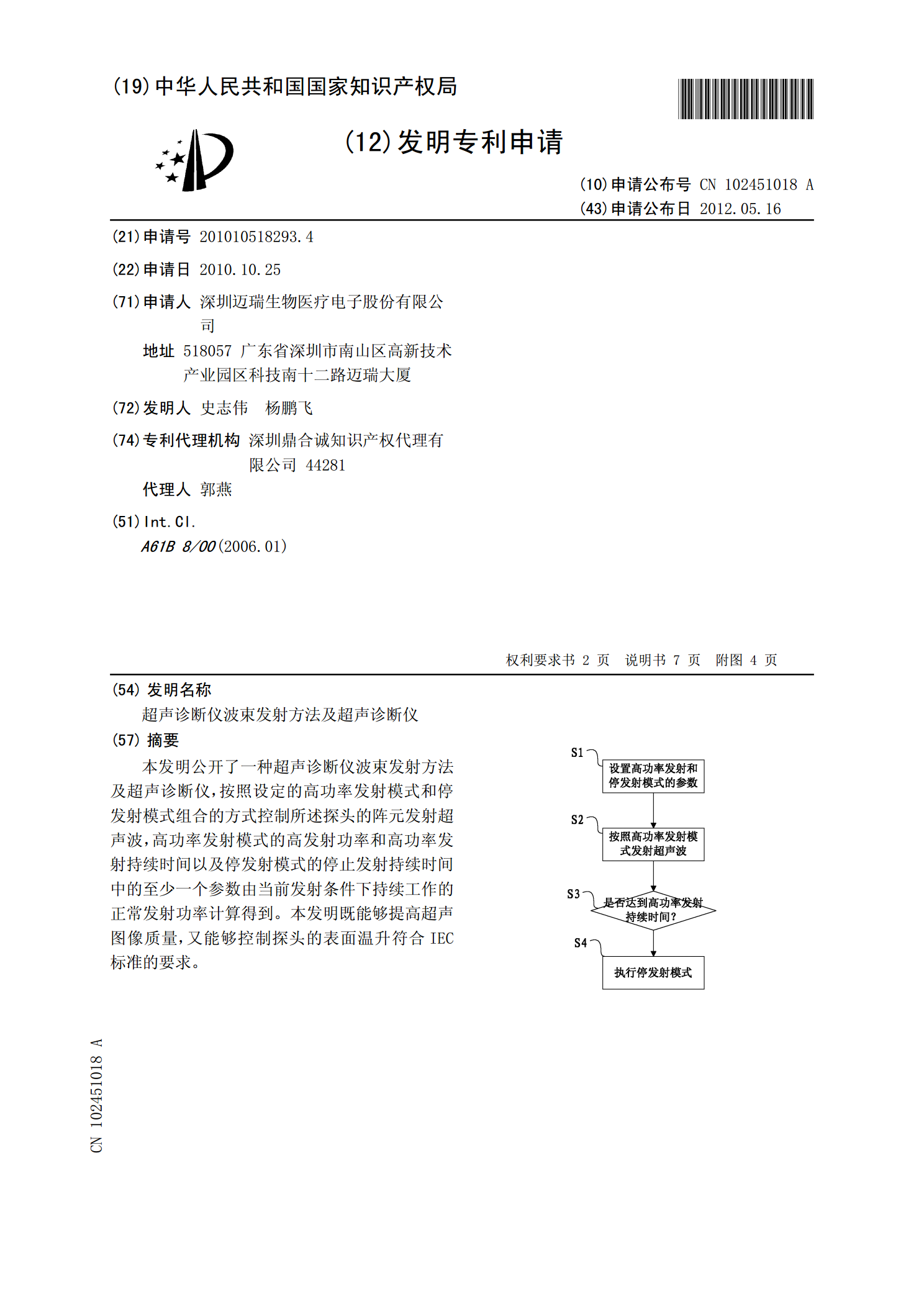
本发明公开了一种超声诊断仪波束发射方法及超声诊断仪,按照设定的高功率发射模式和停发射模式组合的方式控制所述探头的阵元发射超声波,高功率发射模式的高发射功率和高功率发射持续时间以及停发射模式的停止发射持续时间中的至少一个参数由当前发射条件下持续工作的正常发射功率计算得到。本发明既能够提高超声图像质量,又能够控制探头的表面温升符合IEC标准的要求。
一种控制超声诊断仪显示界面的方法、超声诊断仪.pdf
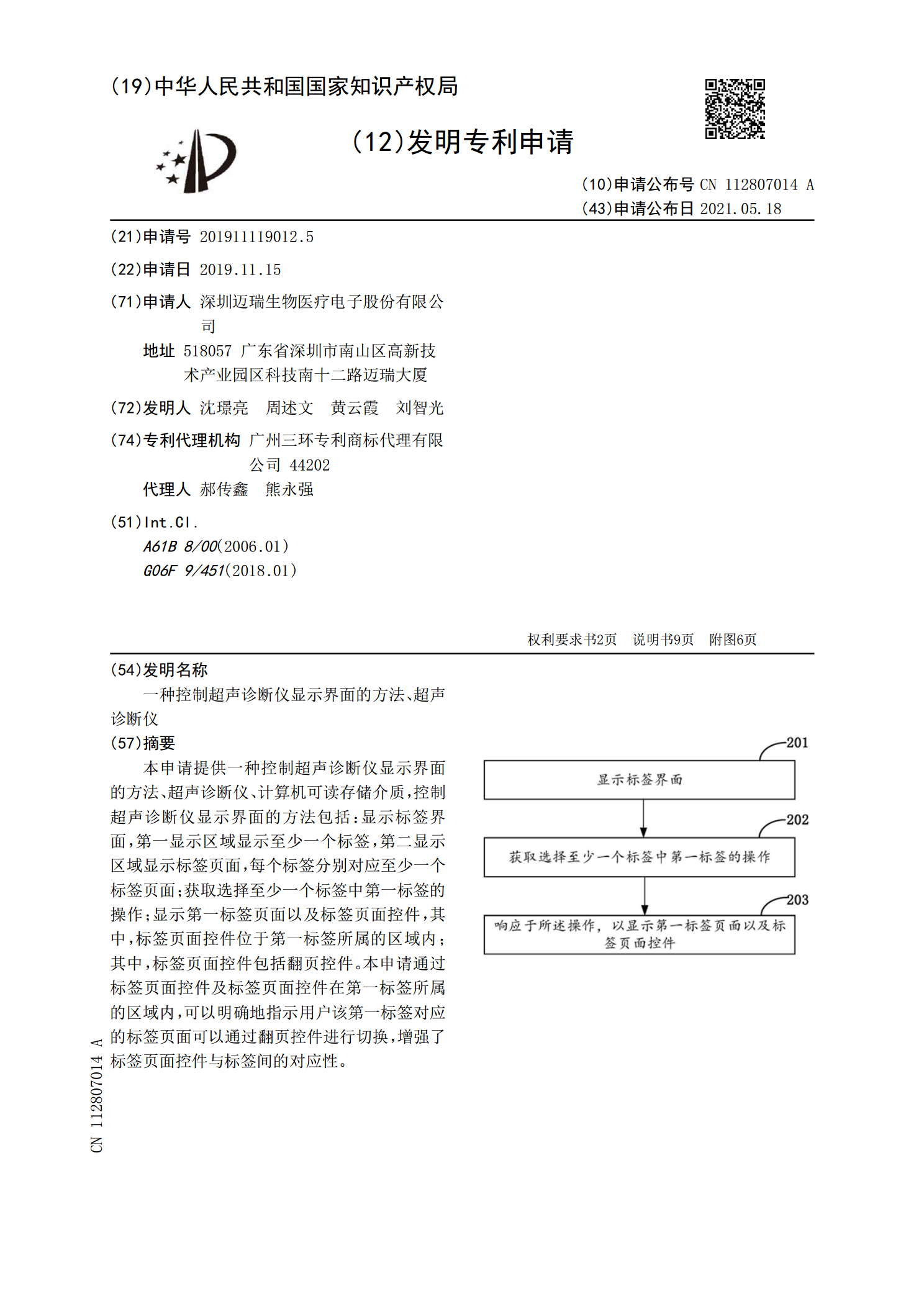
本申请提供一种控制超声诊断仪显示界面的方法、超声诊断仪、计算机可读存储介质,控制超声诊断仪显示界面的方法包括:显示标签界面,第一显示区域显示至少一个标签,第二显示区域显示标签页面,每个标签分别对应至少一个标签页面;获取选择至少一个标签中第一标签的操作;显示第一标签页面以及标签页面控件,其中,标签页面控件位于第一标签所属的区域内;其中,标签页面控件包括翻页控件。本申请通过标签页面控件及标签页面控件在第一标签所属的区域内,可以明确地指示用户该第一标签对应的标签页面可以通过翻页控件进行切换,增强了标签页面控件与