
一种新型可远程操控和自动驾驶的双动力挖掘机.pdf

Do****76


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种新型可远程操控和自动驾驶的双动力挖掘机.pdf
本发明公开了一种新型可远程操控和自动驾驶的双动力挖掘机,包括动力机、控制室、升降臂、挖掘斗和行走结构,所述动力机包括柴油机和电动机,所述电动机的内部设置有转子,所述转子的一端设置有电动机动力输出轴,所述转子的另一端设置有后端轴,所述离合器包括离合器盖、拨叉、润滑机构和清理机构,所述润滑机构包括套环,所述动力机还包括卷线器,所述卷线器通过电缆与电动机相连接,所述控制室的内部设置有验证请求接收模块、验证模块、生成模块、发送模块和操控指令接收模块。本发明具有油电两种动力,用电可降低噪声,减少排放,降低作业成本,
一种可远程操控的混合设备.pdf
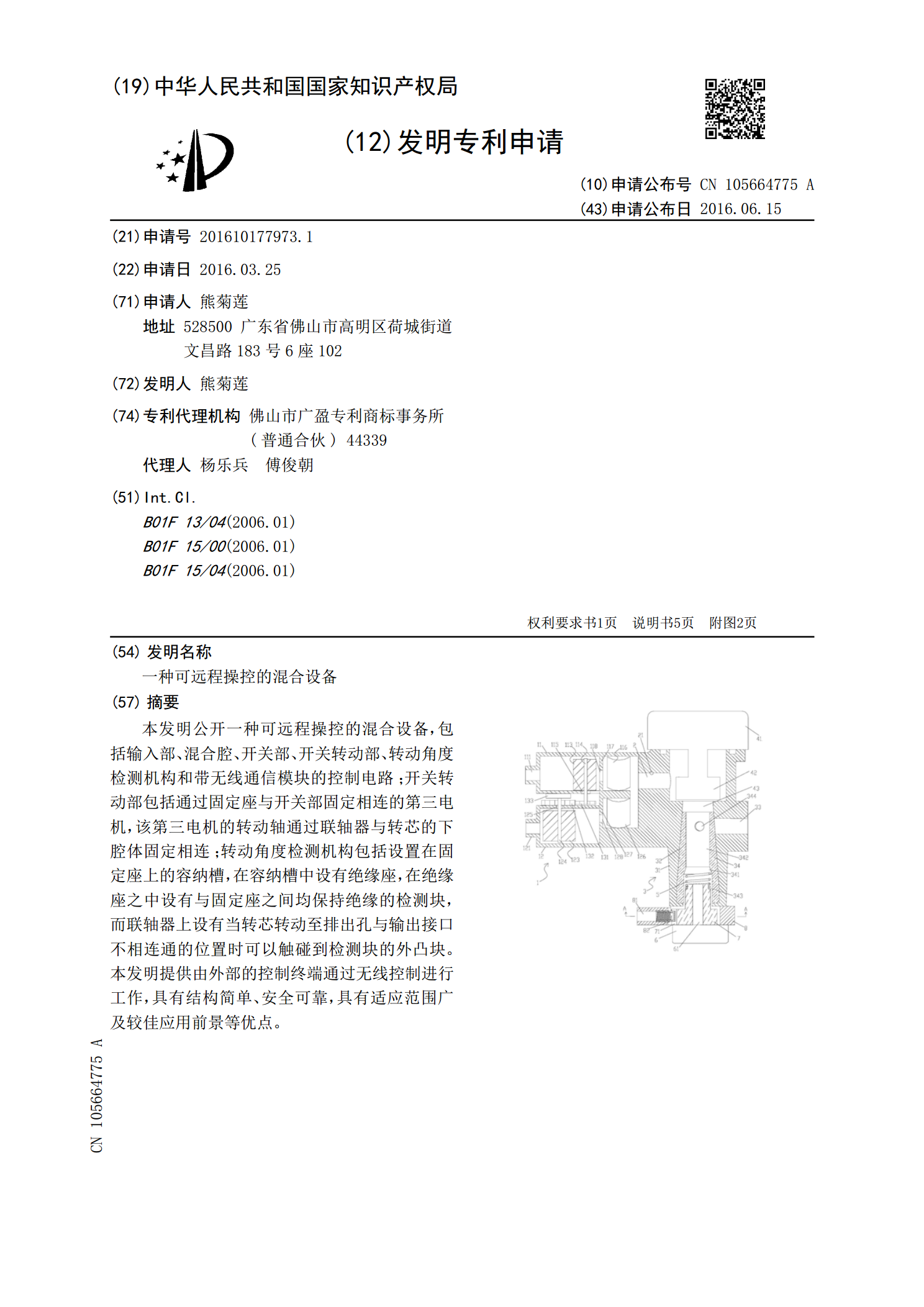
本发明公开一种可远程操控的混合设备,包括输入部、混合腔、开关部、开关转动部、转动角度检测机构和带无线通信模块的控制电路;开关转动部包括通过固定座与开关部固定相连的第三电机,该第三电机的转动轴通过联轴器与转芯的下腔体固定相连;转动角度检测机构包括设置在固定座上的容纳槽,在容纳槽中设有绝缘座,在绝缘座之中设有与固定座之间均保持绝缘的检测块,而联轴器上设有当转芯转动至排出孔与输出接口不相连通的位置时可以触碰到检测块的外凸块。本发明提供由外部的控制终端通过无线控制进行工作,具有结构简单、安全可靠,具有适应范围广及
一种可远程操控的室内堆垛机.pdf
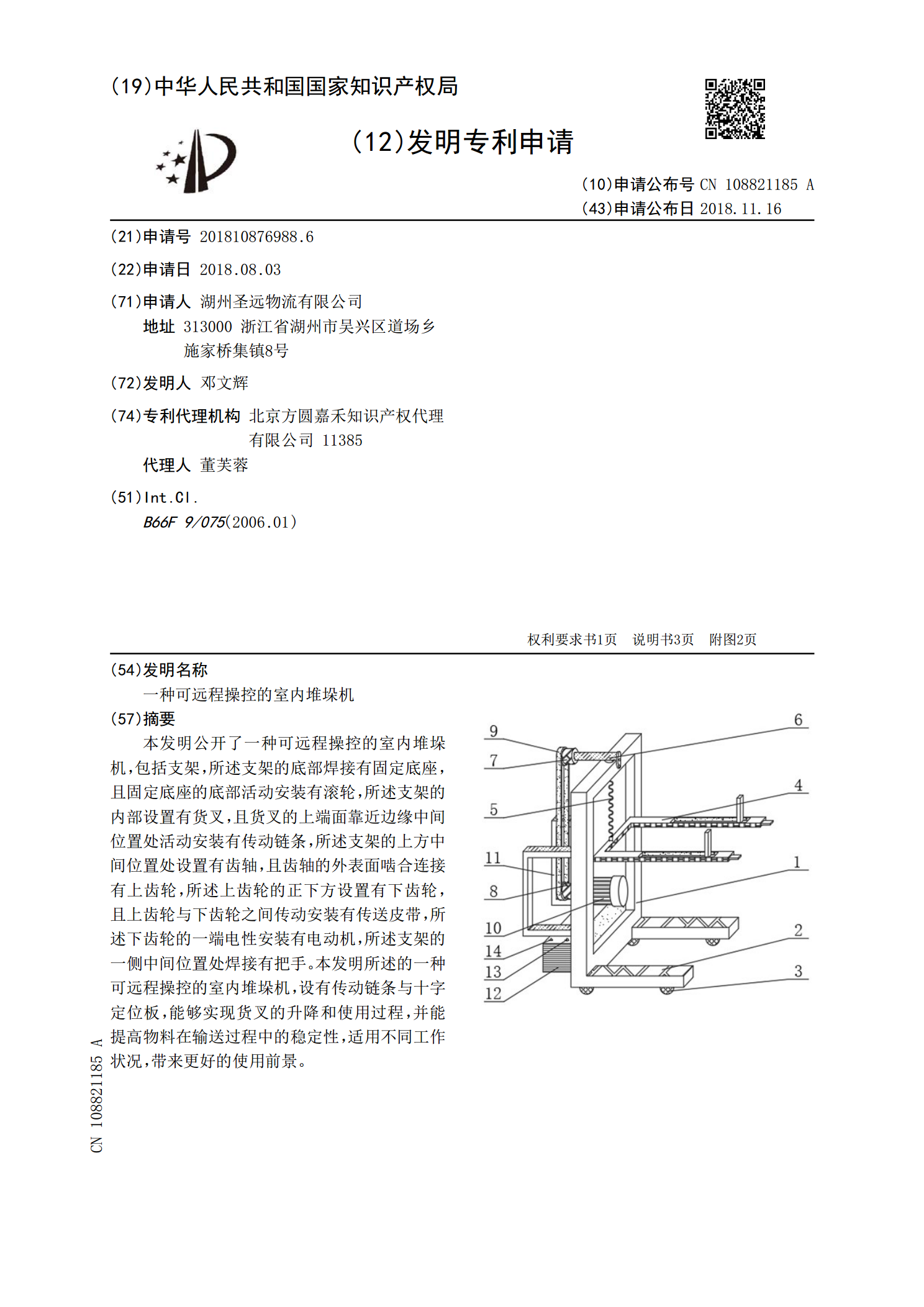
本发明公开了一种可远程操控的室内堆垛机,包括支架,所述支架的底部焊接有固定底座,且固定底座的底部活动安装有滚轮,所述支架的内部设置有货叉,且货叉的上端面靠近边缘中间位置处活动安装有传动链条,所述支架的上方中间位置处设置有齿轴,且齿轴的外表面啮合连接有上齿轮,所述上齿轮的正下方设置有下齿轮,且上齿轮与下齿轮之间传动安装有传送皮带,所述下齿轮的一端电性安装有电动机,所述支架的一侧中间位置处焊接有把手。本发明所述的一种可远程操控的室内堆垛机,设有传动链条与十字定位板,能够实现货叉的升降和使用过程,并能提高物料在
一种可远程操控的智能电控门.pdf
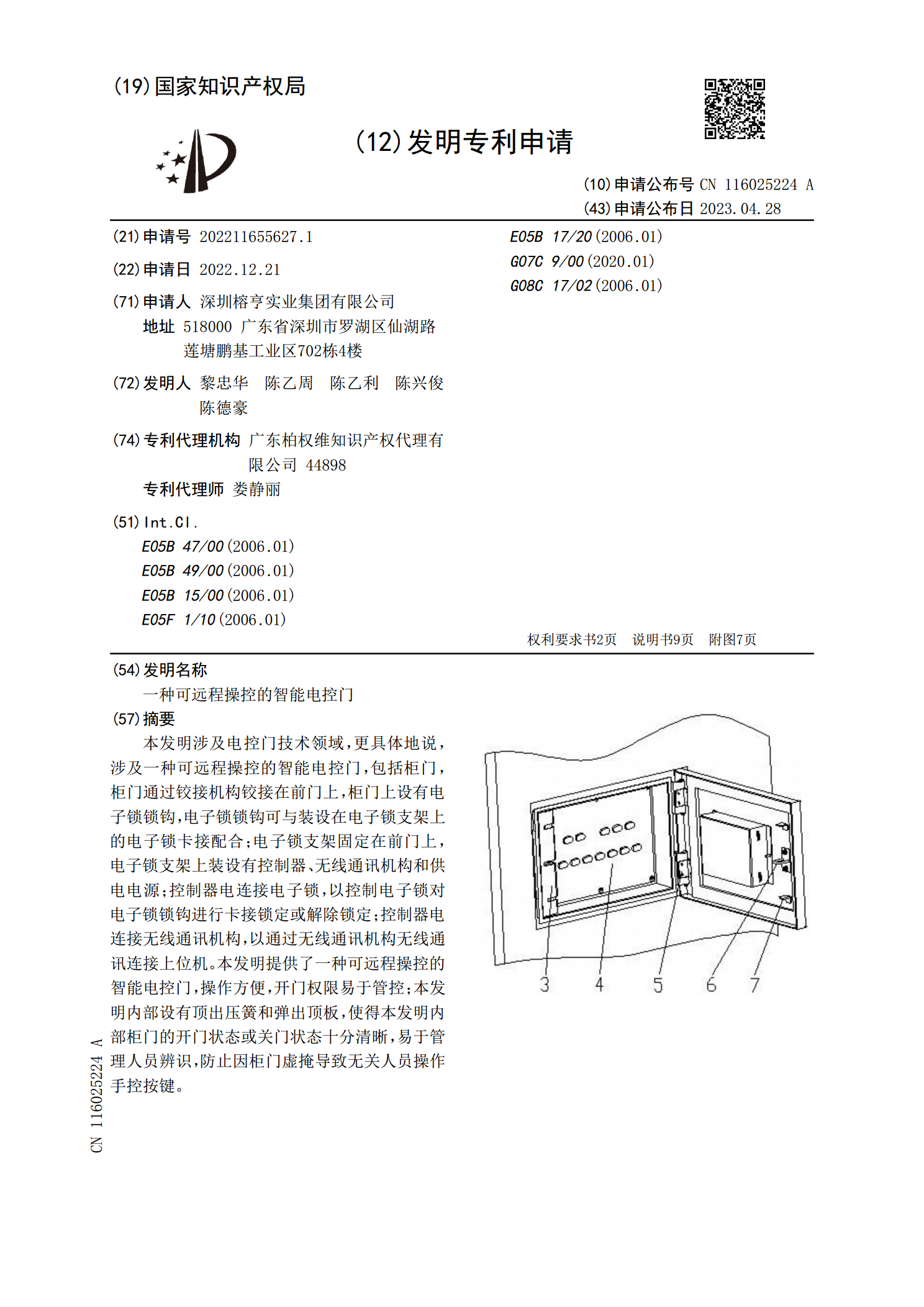
本发明涉及电控门技术领域,更具体地说,涉及一种可远程操控的智能电控门,包括柜门,柜门通过铰接机构铰接在前门上,柜门上设有电子锁锁钩,电子锁锁钩可与装设在电子锁支架上的电子锁卡接配合;电子锁支架固定在前门上,电子锁支架上装设有控制器、无线通讯机构和供电电源;控制器电连接电子锁,以控制电子锁对电子锁锁钩进行卡接锁定或解除锁定;控制器电连接无线通讯机构,以通过无线通讯机构无线通讯连接上位机。本发明提供了一种可远程操控的智能电控门,操作方便,开门权限易于管控;本发明内部设有顶出压簧和弹出顶板,使得本发明内部柜门的
一种可远程操控的起重机.pdf
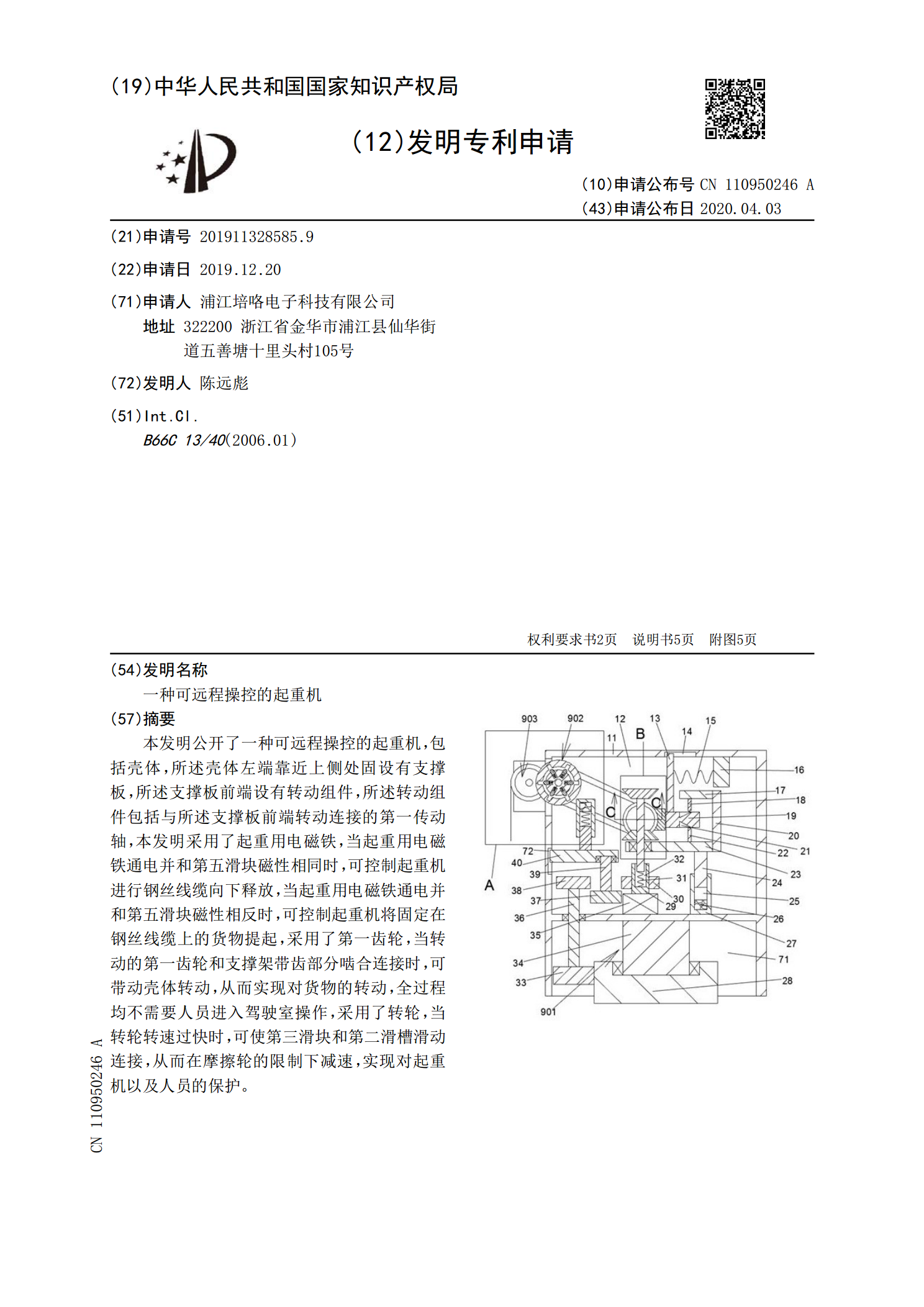
本发明公开了一种可远程操控的起重机,包括壳体,所述壳体左端靠近上侧处固设有支撑板,所述支撑板前端设有转动组件,所述转动组件包括与所述支撑板前端转动连接的第一传动轴,本发明采用了起重用电磁铁,当起重用电磁铁通电并和第五滑块磁性相同时,可控制起重机进行钢丝线缆向下释放,当起重用电磁铁通电并和第五滑块磁性相反时,可控制起重机将固定在钢丝线缆上的货物提起,采用了第一齿轮,当转动的第一齿轮和支撑架带齿部分啮合连接时,可带动壳体转动,从而实现对货物的转动,全过程均不需要人员进入驾驶室操作,采用了转轮,当转轮转速过快时