
基于BIM技术的智能化建筑施工监管系统.pdf

努力****爱静

1/10

2/10

3/10

4/10
5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于BIM技术的智能化建筑施工监管系统.pdf
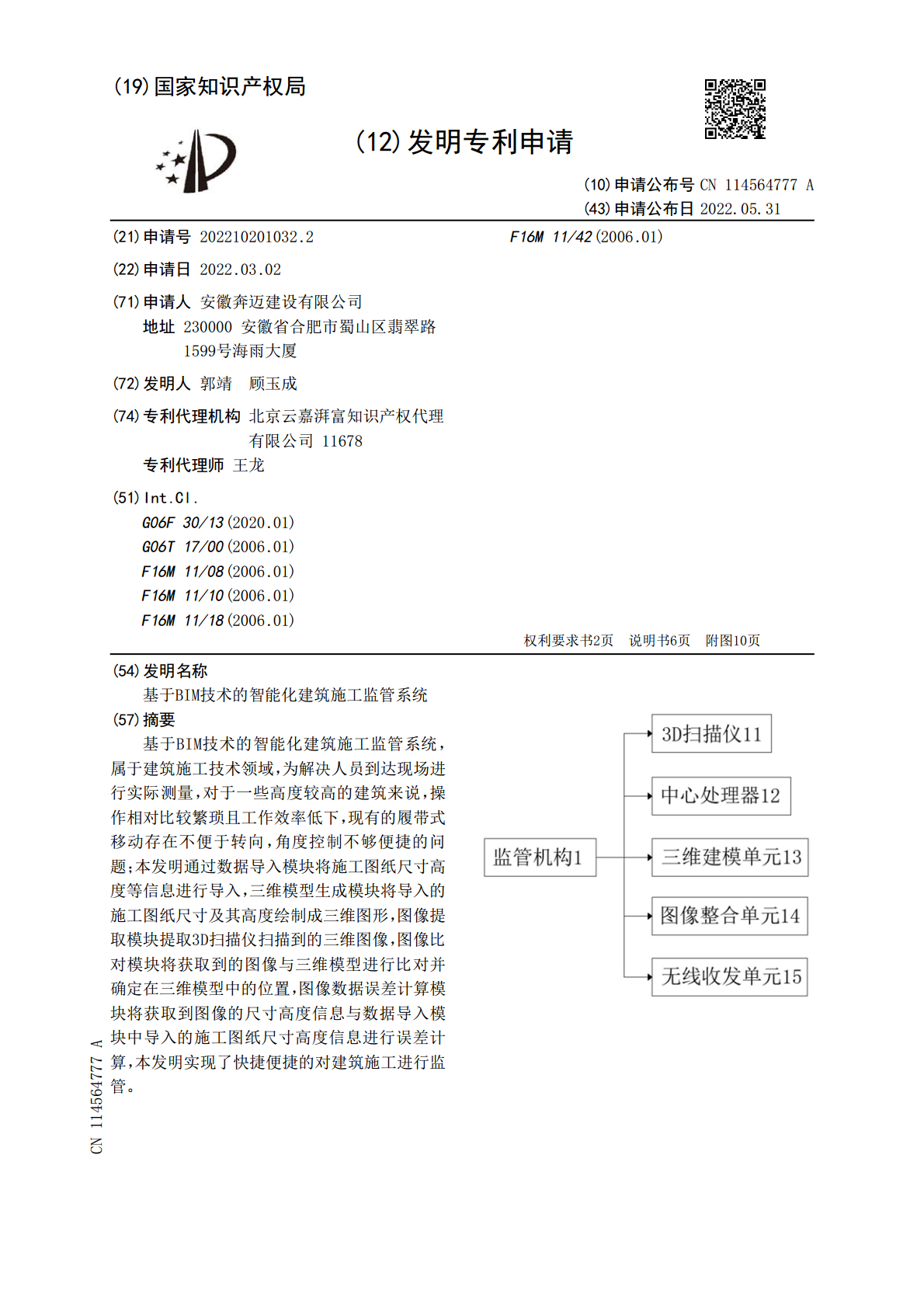
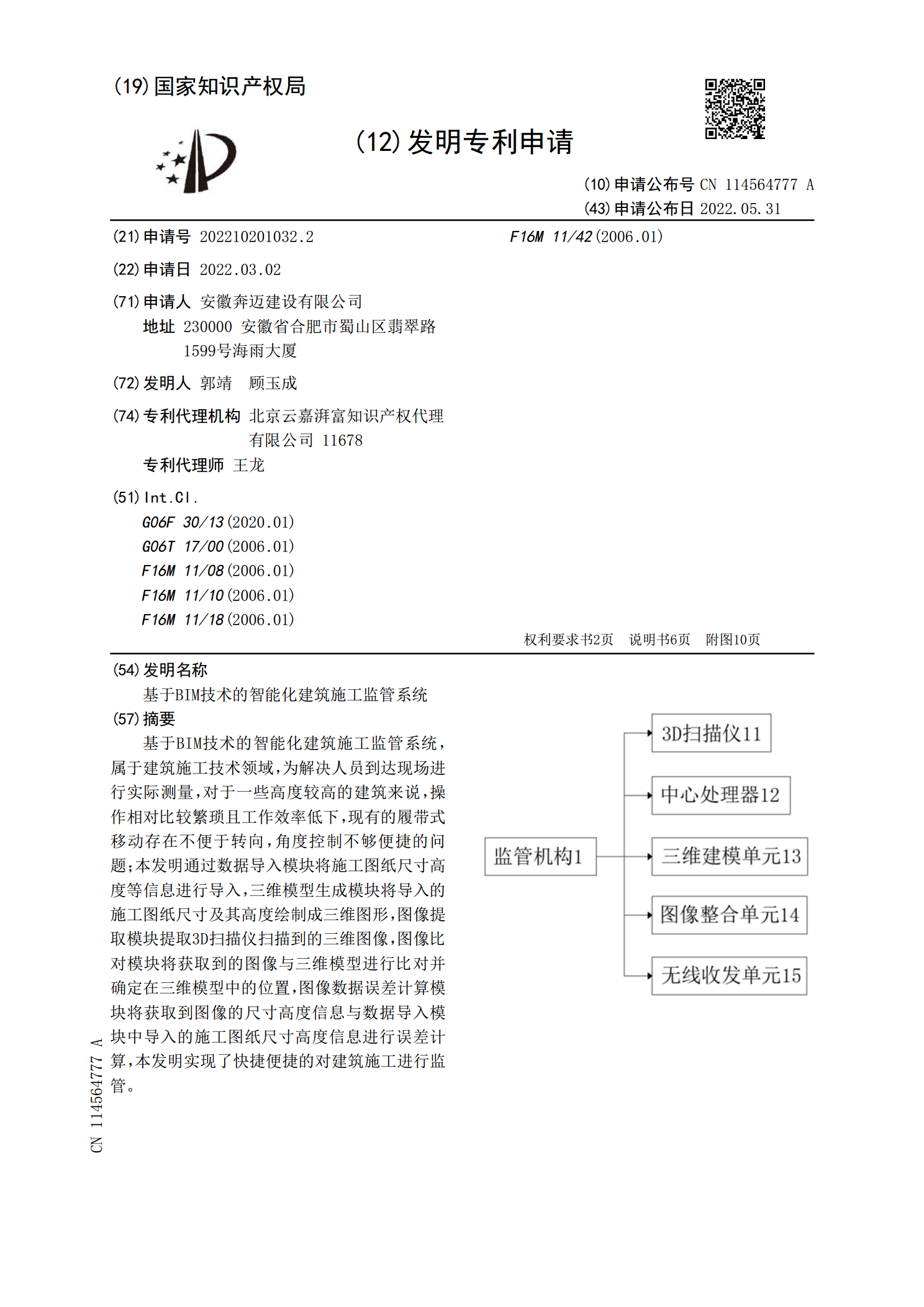
基于BIM技术的智能化建筑施工监管系统,属于建筑施工技术领域,为解决人员到达现场进行实际测量,对于一些高度较高的建筑来说,操作相对比较繁琐且工作效率低下,现有的履带式移动存在不便于转向,角度控制不够便捷的问题;本发明通过数据导入模块将施工图纸尺寸高度等信息进行导入,三维模型生成模块将导入的施工图纸尺寸及其高度绘制成三维图形,图像提取模块提取3D扫描仪扫描到的三维图像,图像比对模块将获取到的图像与三维模型进行比对并确定在三维模型中的位置,图像数据误差计算模块将获取到图像的尺寸高度信息与数据导入模块中导入的施
基于BIM技术的建筑施工监管装置.pdf
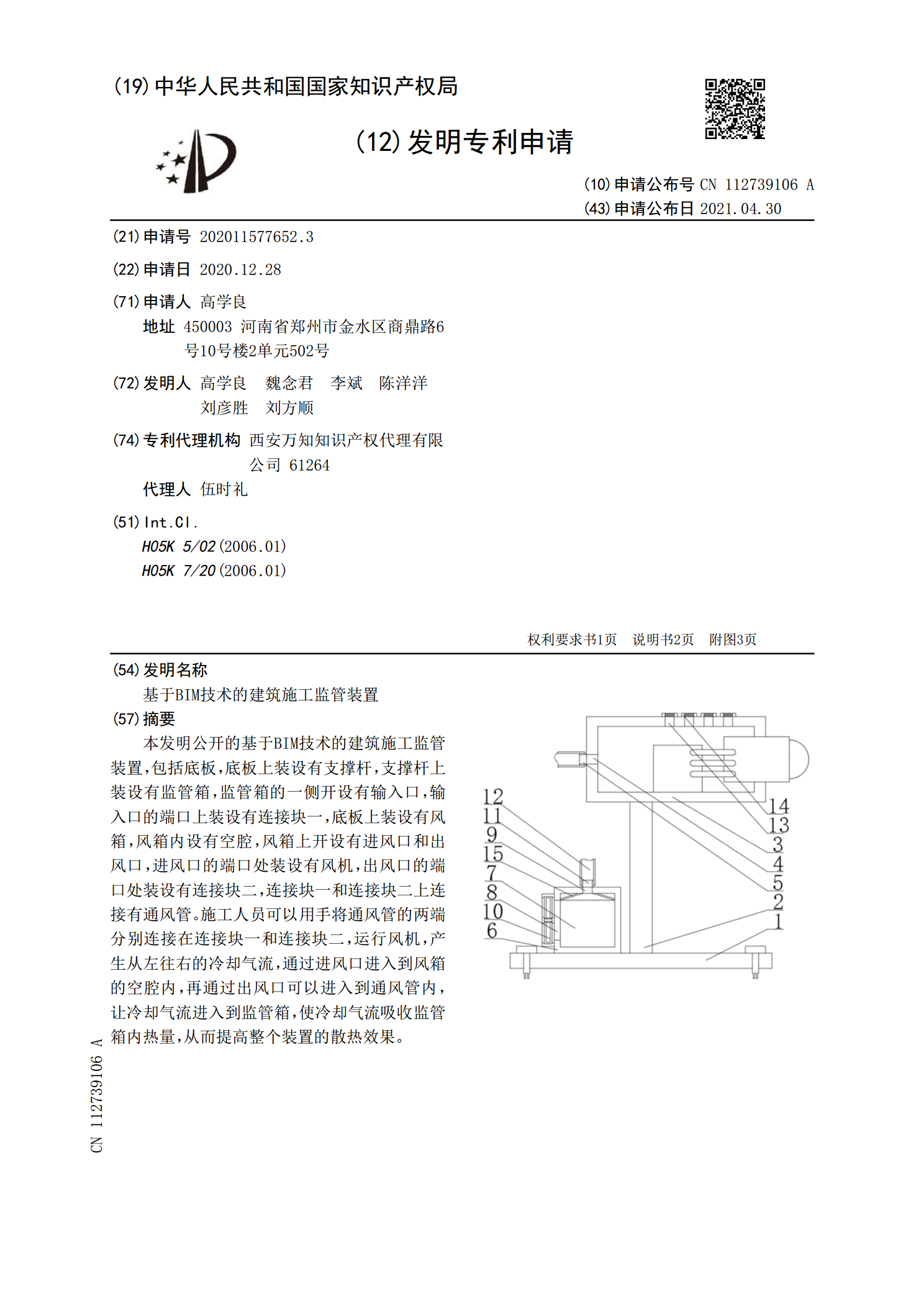
本发明公开的基于BIM技术的建筑施工监管装置,包括底板,底板上装设有支撑杆,支撑杆上装设有监管箱,监管箱的一侧开设有输入口,输入口的端口上装设有连接块一,底板上装设有风箱,风箱内设有空腔,风箱上开设有进风口和出风口,进风口的端口处装设有风机,出风口的端口处装设有连接块二,连接块一和连接块二上连接有通风管。施工人员可以用手将通风管的两端分别连接在连接块一和连接块二,运行风机,产生从左往右的冷却气流,通过进风口进入到风箱的空腔内,再通过出风口可以进入到通风管内,让冷却气流进入到监管箱,使冷却气流吸收监管箱内热

基于BIM技术的智能化施工管理系统研发.docx
基于BIM技术的智能化施工管理系统研发随着信息技术的快速发展,数字化施工管理已逐步被建筑业采用和推广。BIM技术,即建筑信息模型技术,是一种将建筑设计、施工、养护等环节进行集成化、协同化处理的技术。随着BIM技术在建筑业的普及,基于BIM技术的智能化施工管理系统也逐渐受到越来越多的关注和探索。一、BIM技术介绍BIM是指建筑信息模型技术,是一种将建筑信息化的方法。BIM模型是基于物理模型的数字模型,通过信息化手段将建筑模型转化为数字化数据,用于建筑设计、施工和管理等各环节的集成化处理。BIM技术对传统的建

基于BIM的建筑施工智能化.docx
基于BIM的建筑施工智能化基于BIM的建筑施工智能化摘要:近年来,建筑行业正面临着越来越严峻的挑战,包括日益增长的劳动力成本、施工安全和效率等问题。为了应对这些问题,建筑行业开始广泛应用建筑信息模型(BIM)技术,实现建筑施工智能化。本论文将分析BIM在建筑施工智能化中的应用,探讨其带来的优势和潜在问题,并提出相应解决方案,以促进建筑施工的智能化发展。1.引言建筑施工智能化是指通过引入智能技术和工具,使建筑施工过程更高效、更安全、更可持续的一种趋势。BIM作为一种数字化技术,提供了实现建筑施工智能化的基础

基于BIM应用技术的建筑施工智能化探究.docx
基于BIM应用技术的建筑施工智能化探究随着科技的高速发展,建筑行业也在不断地发展,建筑施工智能化成为了未来建筑发展的趋势。而BIM(建筑信息模型)作为一种数字化建造管理平台,为建筑施工智能化提供了有力的支持。因此,本文将探讨BIM应用技术在建筑施工智能化中的重要作用和发展趋势。一、BIM技术及其应用BIM(BuildingInformationModeling)是一种建筑信息建模和管理的数字化工具,是一种可以模拟建筑物在现实环境中建筑的技术。BIM可以将设计、施工和运维等所有环节进行数字化管理,包括建筑物