
液压驱动仿生机器海豚.pdf

书生****文章

1/10

2/10

3/10
4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

液压驱动仿生机器海豚.pdf
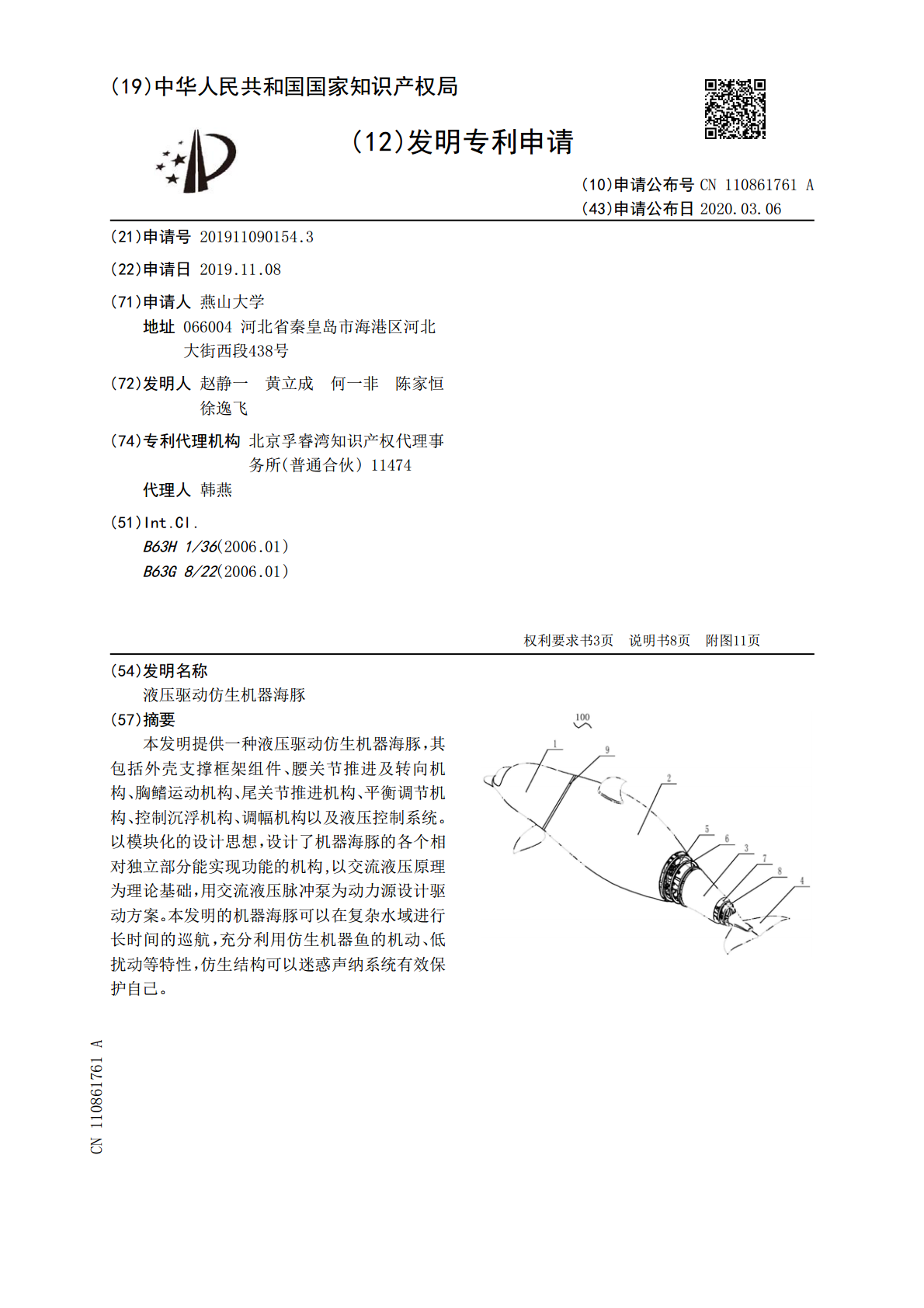
本发明提供一种液压驱动仿生机器海豚,其包括外壳支撑框架组件、腰关节推进及转向机构、胸鳍运动机构、尾关节推进机构、平衡调节机构、控制沉浮机构、调幅机构以及液压控制系统。以模块化的设计思想,设计了机器海豚的各个相对独立部分能实现功能的机构,以交流液压原理为理论基础,用交流液压脉冲泵为动力源设计驱动方案。本发明的机器海豚可以在复杂水域进行长时间的巡航,充分利用仿生机器鱼的机动、低扰动等特性,仿生结构可以迷惑声纳系统有效保护自己。
一种仿生机器液压驱动密封液压缸的高压室.pdf
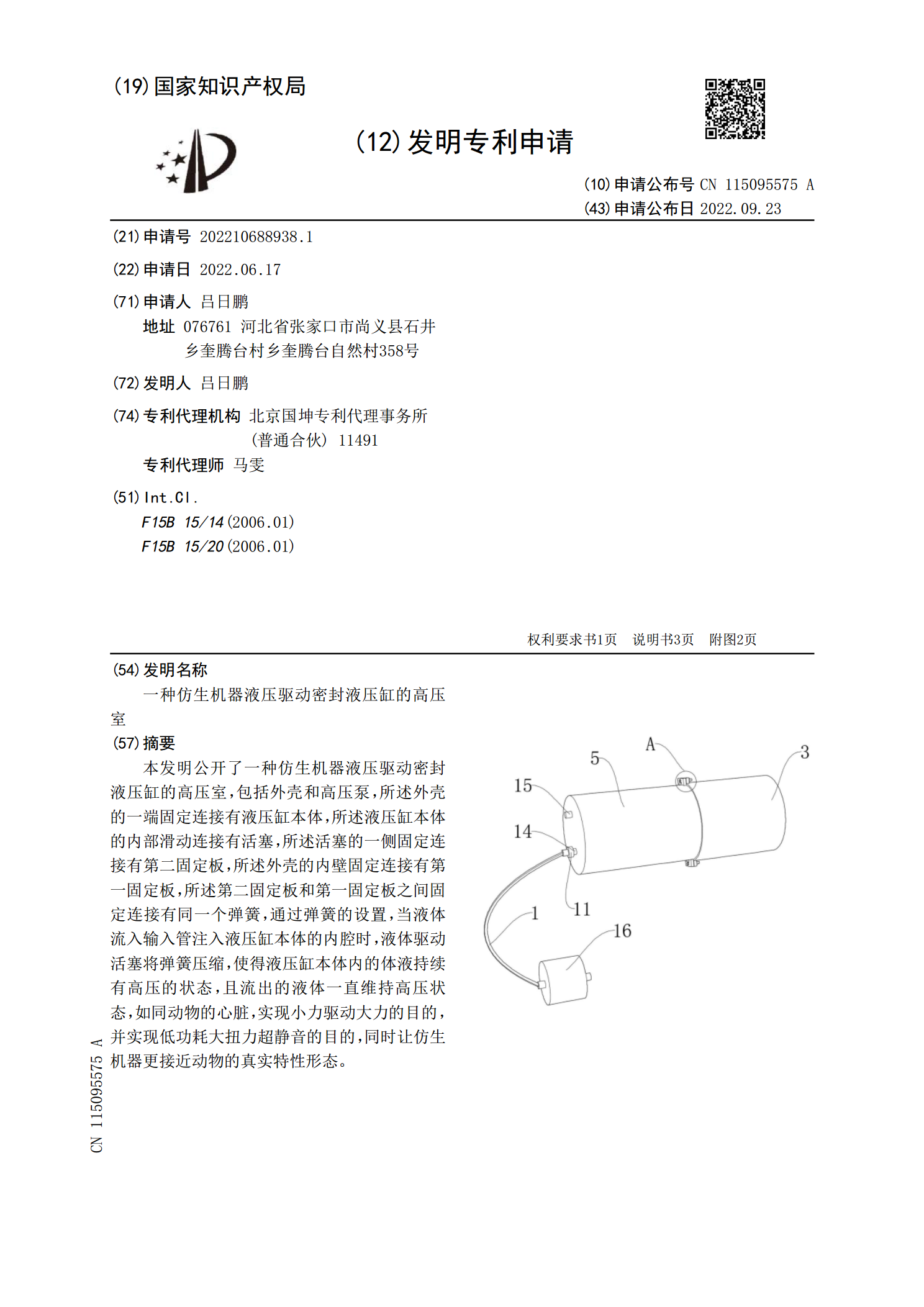
本发明公开了一种仿生机器液压驱动密封液压缸的高压室,包括外壳和高压泵,所述外壳的一端固定连接有液压缸本体,所述液压缸本体的内部滑动连接有活塞,所述活塞的一侧固定连接有第二固定板,所述外壳的内壁固定连接有第一固定板,所述第二固定板和第一固定板之间固定连接有同一个弹簧,通过弹簧的设置,当液体流入输入管注入液压缸本体的内腔时,液体驱动活塞将弹簧压缩,使得液压缸本体内的体液持续有高压的状态,且流出的液体一直维持高压状态,如同动物的心脏,实现小力驱动大力的目的,并实现低功耗大扭力超静音的目的,同时让仿生机器更接近动

用于机器的静液压驱动.pdf
一种静液压驱动(200)包括能够供应传动流体的静液压泵(202)。静液压驱动(200)还包括轴马达(210)和鼓马达(208)。轴马达(210)能够驱动一组牵引轮,并且鼓马达(208)能够驱动鼓(114)。静液压驱动(200)还包括轴驱动管线(216)和鼓驱动管线。轴驱动管线(216)和鼓驱动管线分别连接至轴马达(210)和鼓马达(208),以供应传动流体。歧管(226)一体地连接至静液压泵(202),以将轴驱动管线(216)和鼓驱动管线与静液压泵(202)操作地联接。

四足仿生机器人液压驱动单元轨迹灵敏度分析.docx
四足仿生机器人液压驱动单元轨迹灵敏度分析一、引言四足仿生机器人是一种能够适应多种地形且具有益智、自主性和适应性的机器人,其仿生学思想和生物学模型的研究成为了当前机器人研究领域的热点之一。仿生机器人的模型可以由多种动力系统驱动,目前液压驱动系统由于其高功率密度、快速、节能等特点得到广泛应用,成为四足仿生机器人的一种首选技术。然而,在驱动液压系统的设计和控制过程中,车架结构的协调、关节的协调以及液压单元系统的轨迹灵敏度等因素对机器人的行为有重要影响,在仿生机器人领域的应用和推广方面值得深入研究。本文将针对四足

机动型仿生机器海豚运动控制与应用研究.docx
机动型仿生机器海豚运动控制与应用研究机动型仿生机器海豚运动控制与应用研究摘要:仿生机器海豚是一种模仿海豚外形和游动姿态的机器人,具有优异的机动性能和适应水下环境的能力。本文主要针对机动型仿生机器海豚的运动控制和应用进行研究。首先介绍了仿生机器海豚的概念和发展情况,然后重点讨论了机动型仿生机器海豚的运动控制方法和技术,包括基于神经网络的控制算法和自适应控制方法。接着,本文对机动型仿生机器海豚的应用进行了探讨,主要包括水下探测、海洋科学研究和海洋工程等方面。最后,对机动型仿生机器海豚的未来发展进行了展望。关键