
基于多光谱成像与图像处理的户外迷彩评估装置和方法.pdf

新月****姐a


1/9
2/9

3/9
4/9
5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
基于多光谱成像与图像处理的户外迷彩评估装置和方法.pdf
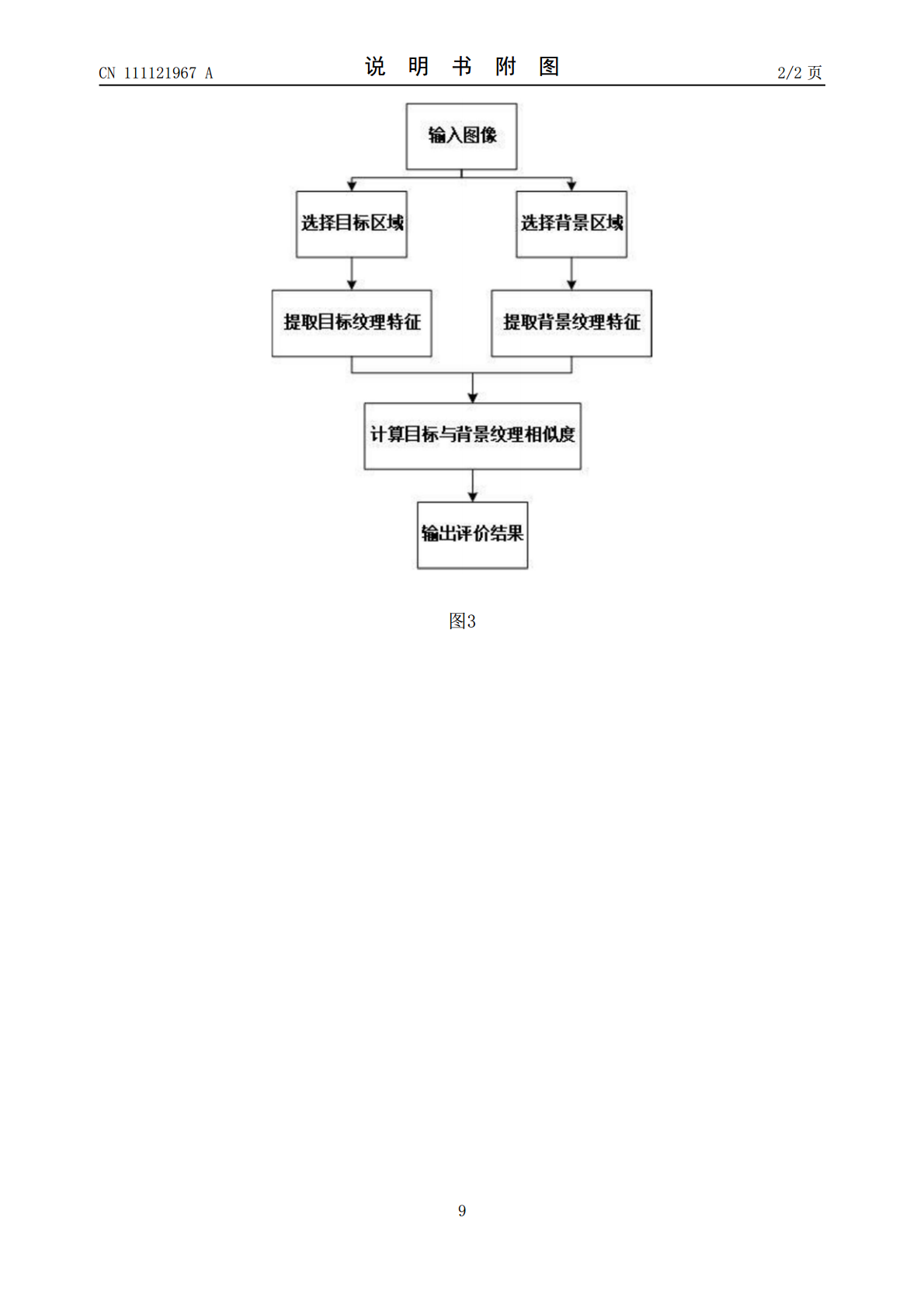
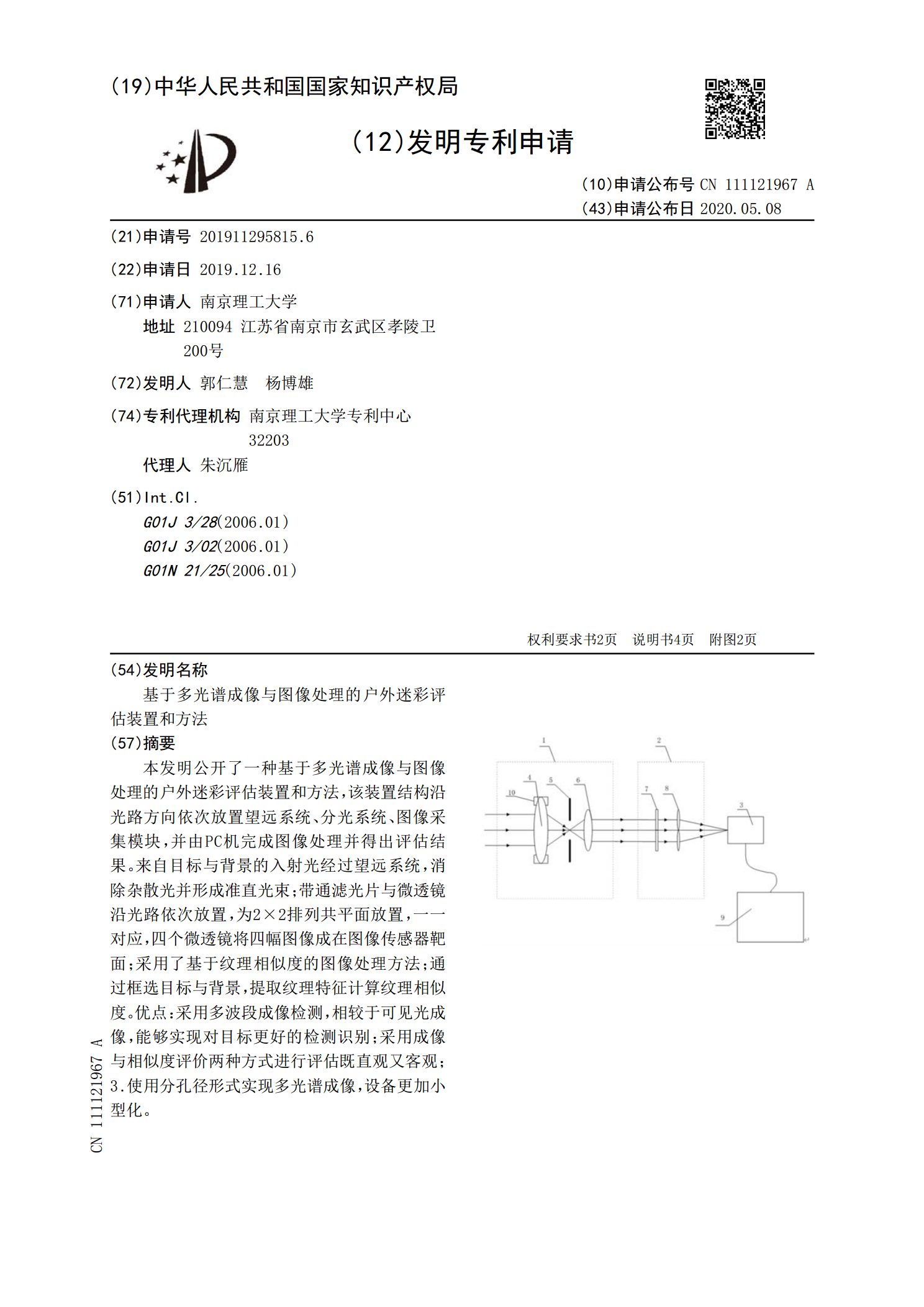
本发明公开了一种基于多光谱成像与图像处理的户外迷彩评估装置和方法,该装置结构沿光路方向依次放置望远系统、分光系统、图像采集模块,并由PC机完成图像处理并得出评估结果。来自目标与背景的入射光经过望远系统,消除杂散光并形成准直光束;带通滤光片与微透镜沿光路依次放置,为2×2排列共平面放置,一一对应,四个微透镜将四幅图像成在图像传感器靶面;采用了基于纹理相似度的图像处理方法;通过框选目标与背景,提取纹理特征计算纹理相似度。优点:采用多波段成像检测,相较于可见光成像,能够实现对目标更好的检测识别;采用成像与相似度
多光谱传感器、成像装置和图像处理方法.pdf
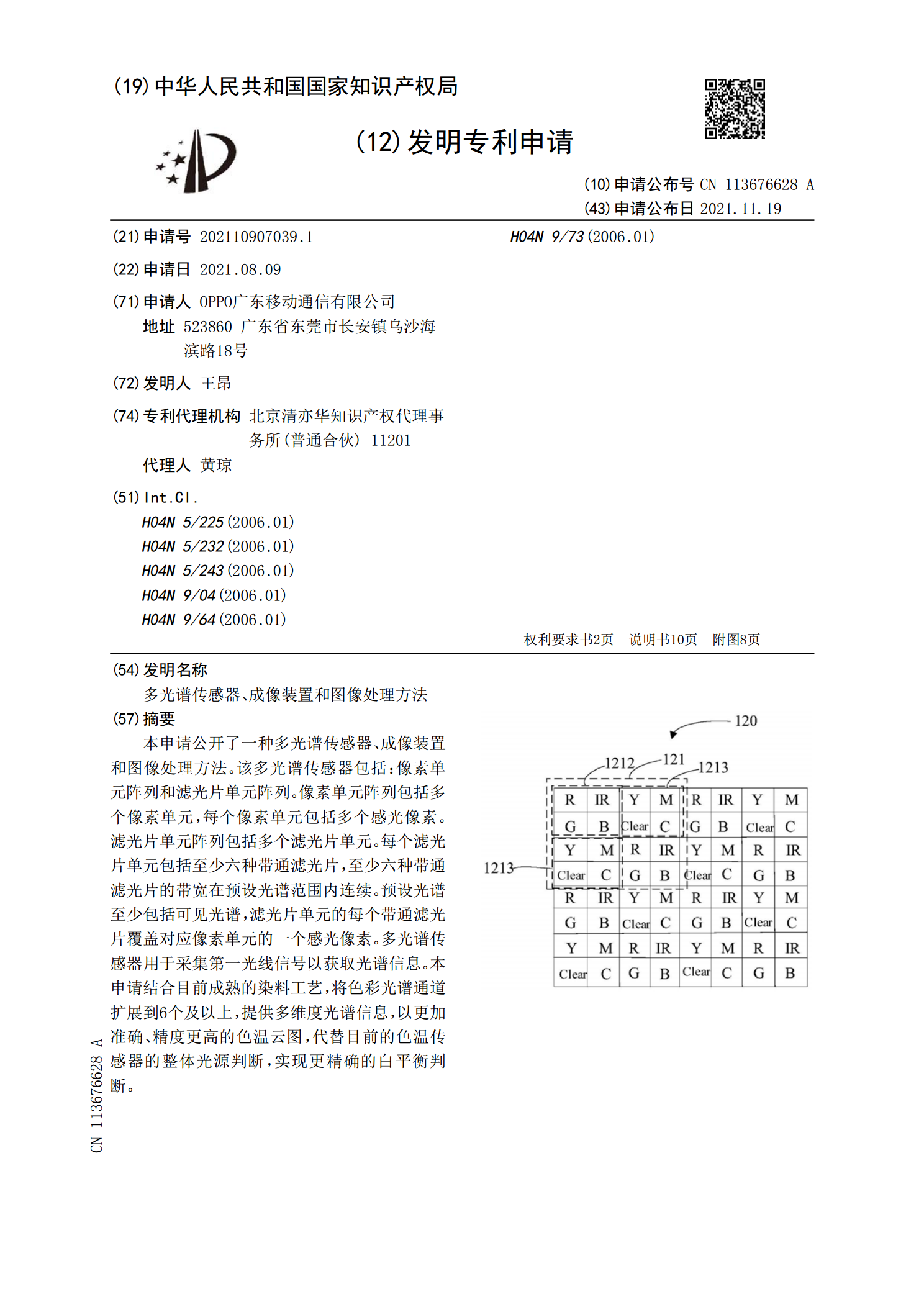
本申请公开了一种多光谱传感器、成像装置和图像处理方法。该多光谱传感器包括:像素单元阵列和滤光片单元阵列。像素单元阵列包括多个像素单元,每个像素单元包括多个感光像素。滤光片单元阵列包括多个滤光片单元。每个滤光片单元包括至少六种带通滤光片,至少六种带通滤光片的带宽在预设光谱范围内连续。预设光谱至少包括可见光谱,滤光片单元的每个带通滤光片覆盖对应像素单元的一个感光像素。多光谱传感器用于采集第一光线信号以获取光谱信息。本申请结合目前成熟的染料工艺,将色彩光谱通道扩展到6个及以上,提供多维度光谱信息,以更加准确、精
基于多光谱成像技术的迷彩伪装材料检测装置和方法.pdf
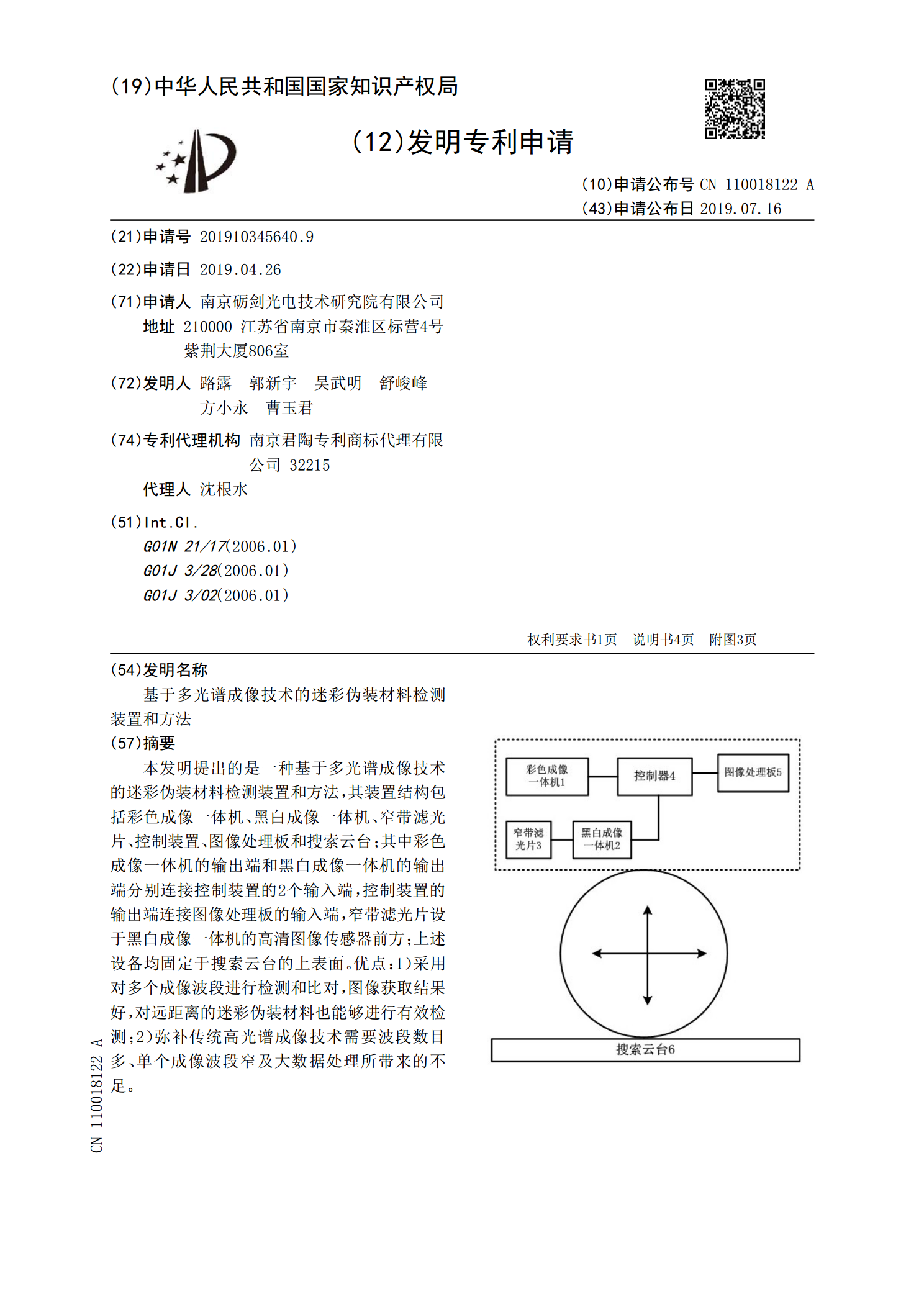
本发明提出的是一种基于多光谱成像技术的迷彩伪装材料检测装置和方法,其装置结构包括彩色成像一体机、黑白成像一体机、窄带滤光片、控制装置、图像处理板和搜索云台;其中彩色成像一体机的输出端和黑白成像一体机的输出端分别连接控制装置的2个输入端,控制装置的输出端连接图像处理板的输入端,窄带滤光片设于黑白成像一体机的高清图像传感器前方;上述设备均固定于搜索云台的上表面。优点:1)采用对多个成像波段进行检测和比对,图像获取结果好,对远距离的迷彩伪装材料也能够进行有效检测;2)弥补传统高光谱成像技术需要波段数目多、单个成
基于多帧图像的图像处理方法和装置.pdf
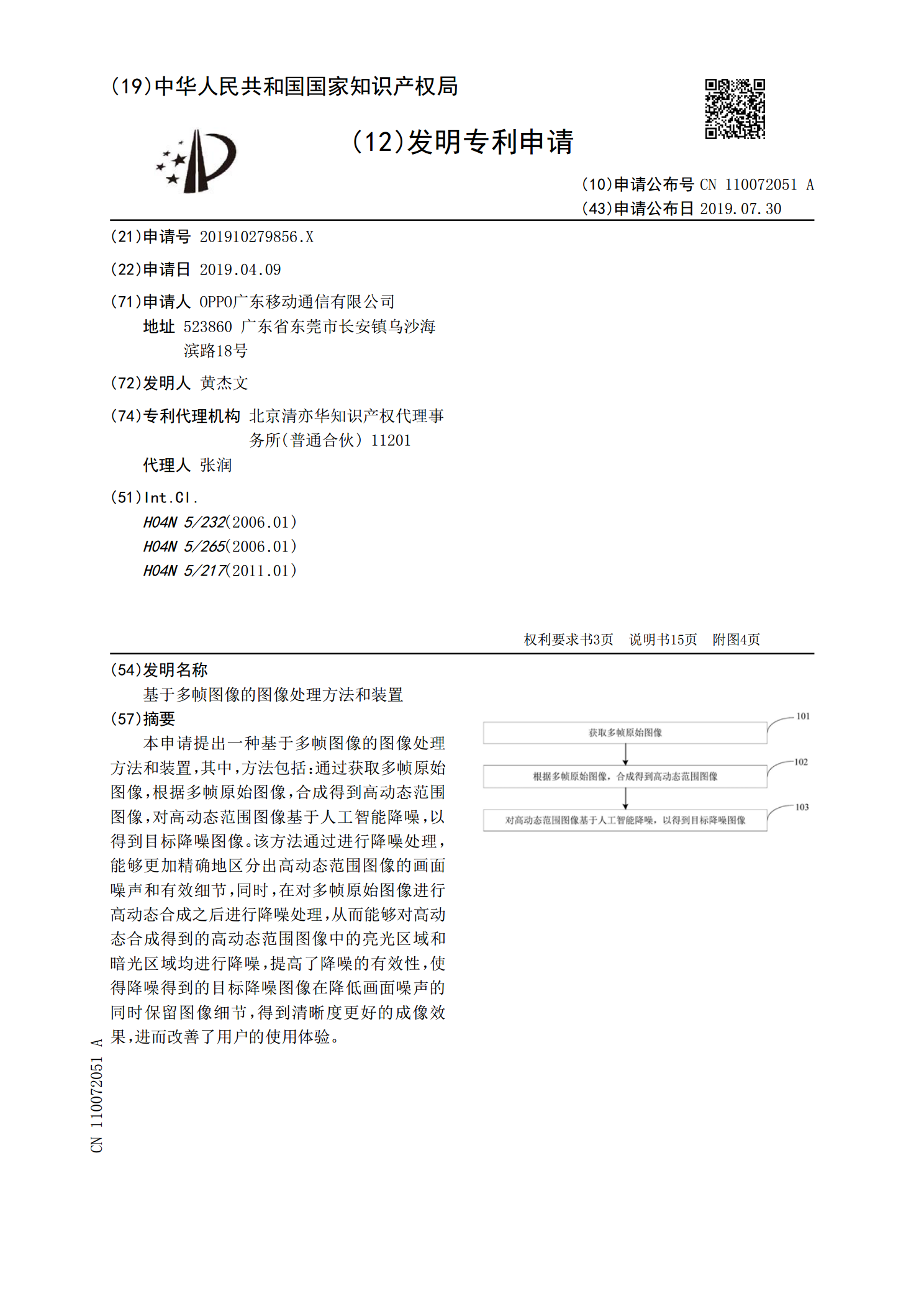
本申请提出一种基于多帧图像的图像处理方法和装置,其中,方法包括:通过获取多帧原始图像,根据多帧原始图像,合成得到高动态范围图像,对高动态范围图像基于人工智能降噪,以得到目标降噪图像。该方法通过进行降噪处理,能够更加精确地区分出高动态范围图像的画面噪声和有效细节,同时,在对多帧原始图像进行高动态合成之后进行降噪处理,从而能够对高动态合成得到的高动态范围图像中的亮光区域和暗光区域均进行降噪,提高了降噪的有效性,使得降噪得到的目标降噪图像在降低画面噪声的同时保留图像细节,得到清晰度更好的成像效果,进而改善了用户

基于多帧图像的图像处理方法和装置.pdf
本申请提出一种基于多帧图像的图像处理方法和装置,其中,方法包括:获取多帧原始图像,并根据多帧原始图像,合成得到高动态范围图像然后,根据图像纹理信息的不同,将高动态范围图像划分为不同的纹理区域,并采用不同的神经网络模型分别对高动态范围图像中不同纹理区域进行降噪处理,以得到降噪后的高动态范围图像。由此,通过对高动态范围图像中的不同纹理区域分别进行降噪处理,解决了夜景拍摄时,拍摄的图像噪声水平高,影响用户体验的技术问题,实现了对不同纹理区域进行针对性降噪,提高了降噪的有效性,使得降噪得到的高动态范围图像在降低画