
基于城市路网数据的路径规划方法及系统.pdf

猫巷****熙柔


1/10
2/10
3/10

4/10
5/10

6/10

7/10

8/10
9/10
10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于城市路网数据的路径规划方法及系统.pdf
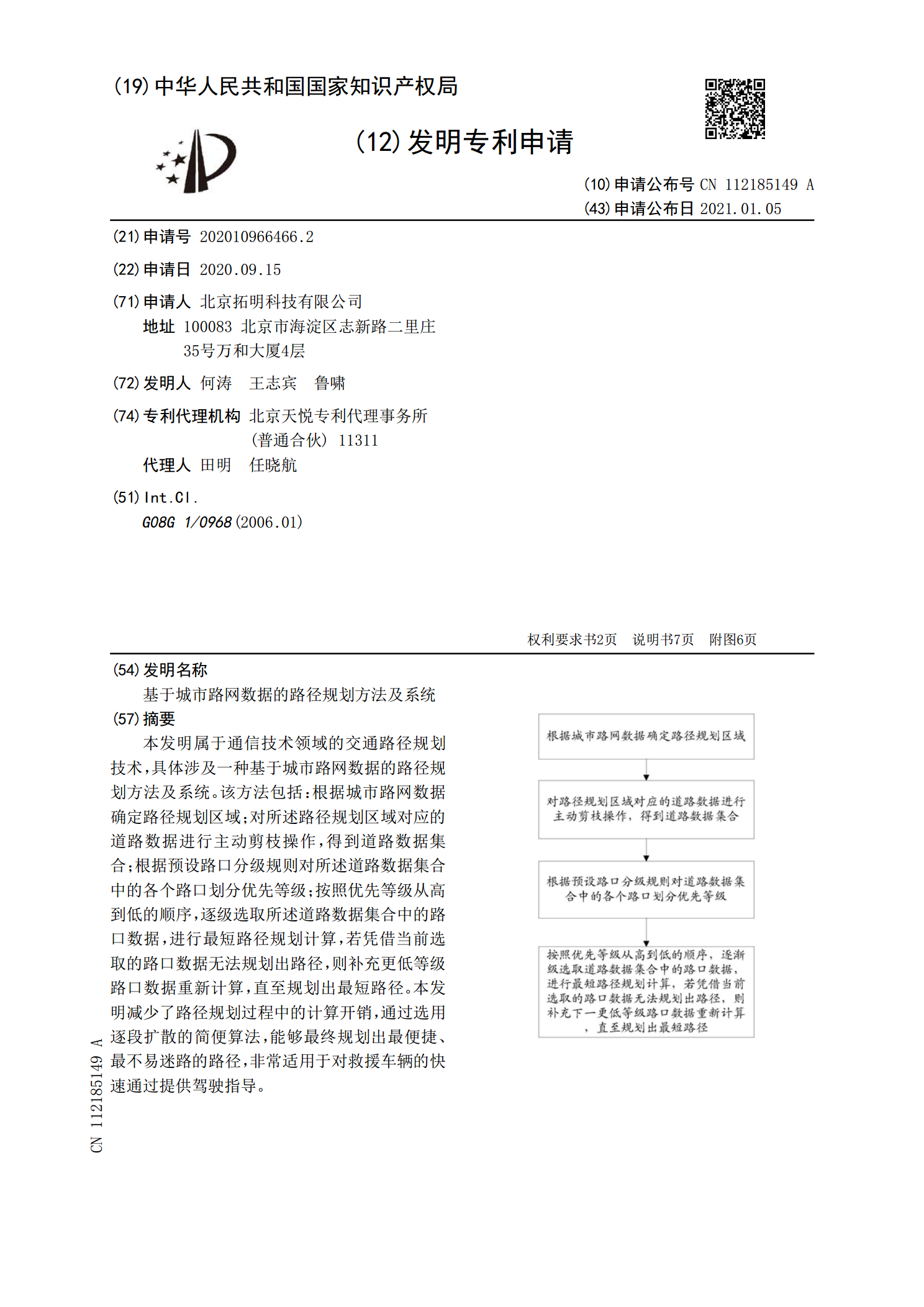
本发明属于通信技术领域的交通路径规划技术,具体涉及一种基于城市路网数据的路径规划方法及系统。该方法包括:根据城市路网数据确定路径规划区域;对所述路径规划区域对应的道路数据进行主动剪枝操作,得到道路数据集合;根据预设路口分级规则对所述道路数据集合中的各个路口划分优先等级;按照优先等级从高到低的顺序,逐级选取所述道路数据集合中的路口数据,进行最短路径规划计算,若凭借当前选取的路口数据无法规划出路径,则补充更低等级路口数据重新计算,直至规划出最短路径。本发明减少了路径规划过程中的计算开销,通过选用逐段扩散的简便
基于时空路网模型的最优路径规划的处理方法及系统.pdf
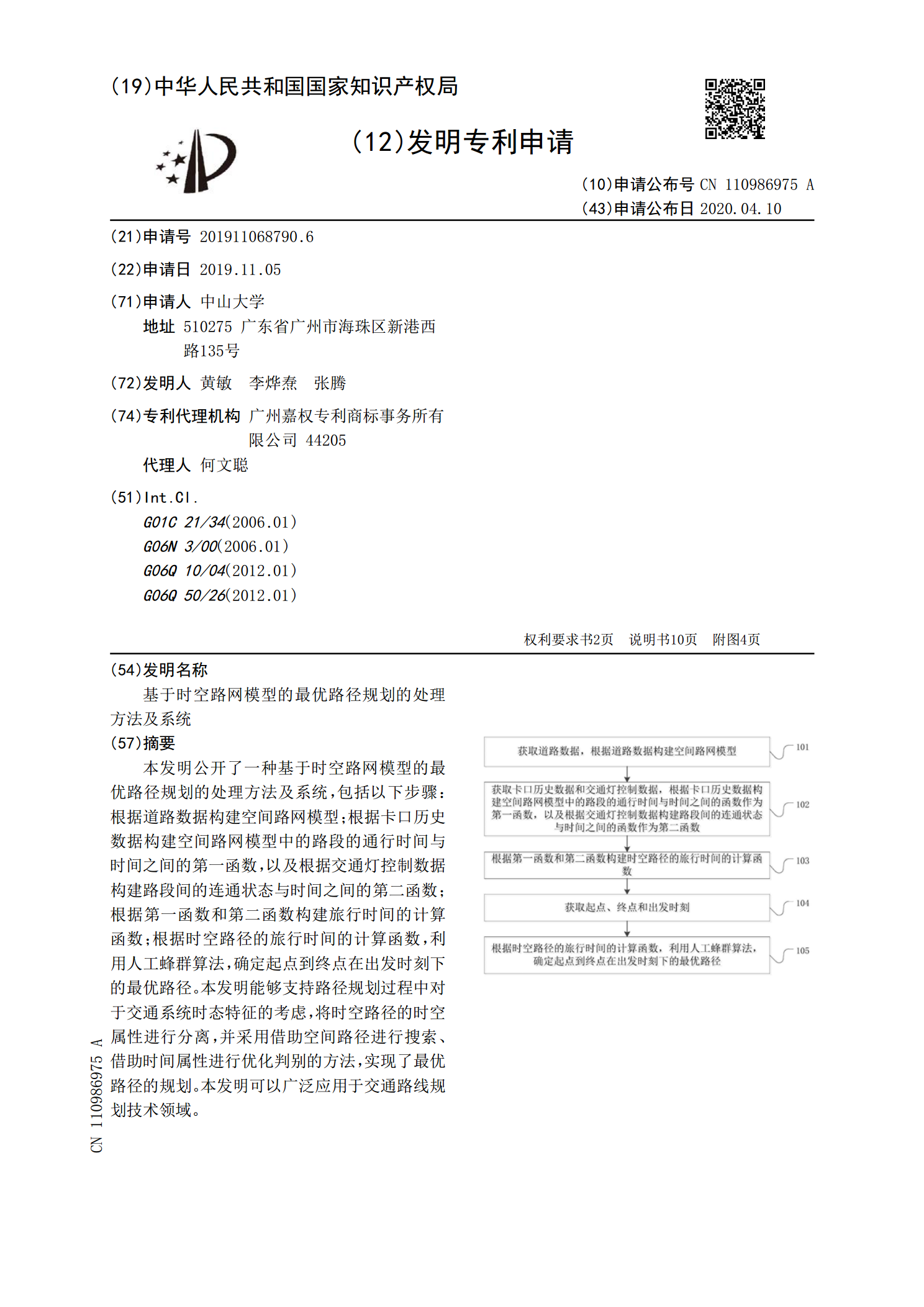
本发明公开了一种基于时空路网模型的最优路径规划的处理方法及系统,包括以下步骤:根据道路数据构建空间路网模型;根据卡口历史数据构建空间路网模型中的路段的通行时间与时间之间的第一函数,以及根据交通灯控制数据构建路段间的连通状态与时间之间的第二函数;根据第一函数和第二函数构建旅行时间的计算函数;根据时空路径的旅行时间的计算函数,利用人工蜂群算法,确定起点到终点在出发时刻下的最优路径。本发明能够支持路径规划过程中对于交通系统时态特征的考虑,将时空路径的时空属性进行分离,并采用借助空间路径进行搜索、借助时间属性进行

基于手机数据的城市交通路网预测与路径选取.docx
基于手机数据的城市交通路网预测与路径选取随着城市化进程不断加速,城市交通拥堵问题日益严重。如何在复杂的城市路网中快速准确找到最优的出行路线,一直是交通领域研究的重点和难点问题。近年来,随着大数据和智能化技术的快速发展,基于手机数据的城市交通路网预测与路径选取逐渐成为一种新的解决方案。所谓基于手机数据的城市交通路网预测与路径选取,是指通过手机定位等数据获取方式,实时采集城市路网交通数据,运用数学模型和机器学习等算法,对城市交通路网进行预测和规划,从而优化出行路径,提高交通效率。当前,手机数据中的位置信息、移

融合城市路网数据模型的路径规划方案研究的中期报告.docx
融合城市路网数据模型的路径规划方案研究的中期报告本文是一份关于融合城市路网数据模型的路径规划方案研究的中期报告,旨在介绍我们团队的研究进展和下一步的工作计划。一、研究背景在城市交通管理中,路径规划是一个重要的问题。传统的路径规划算法通常只考虑距离或时间等单一因素,忽略了城市路网特征(如道路等级、拥堵程度、限制条件等)的复杂性。因此,我们尝试使用融合城市路网数据模型的路径规划方案,以更准确、高效地规划城市道路的路径。二、研究目标本研究的目标是构建一个基于城市路网数据模型的路径规划方案,以全面考虑路径规划的所
一种基于城市路网的最优静态路径选择方法.pdf
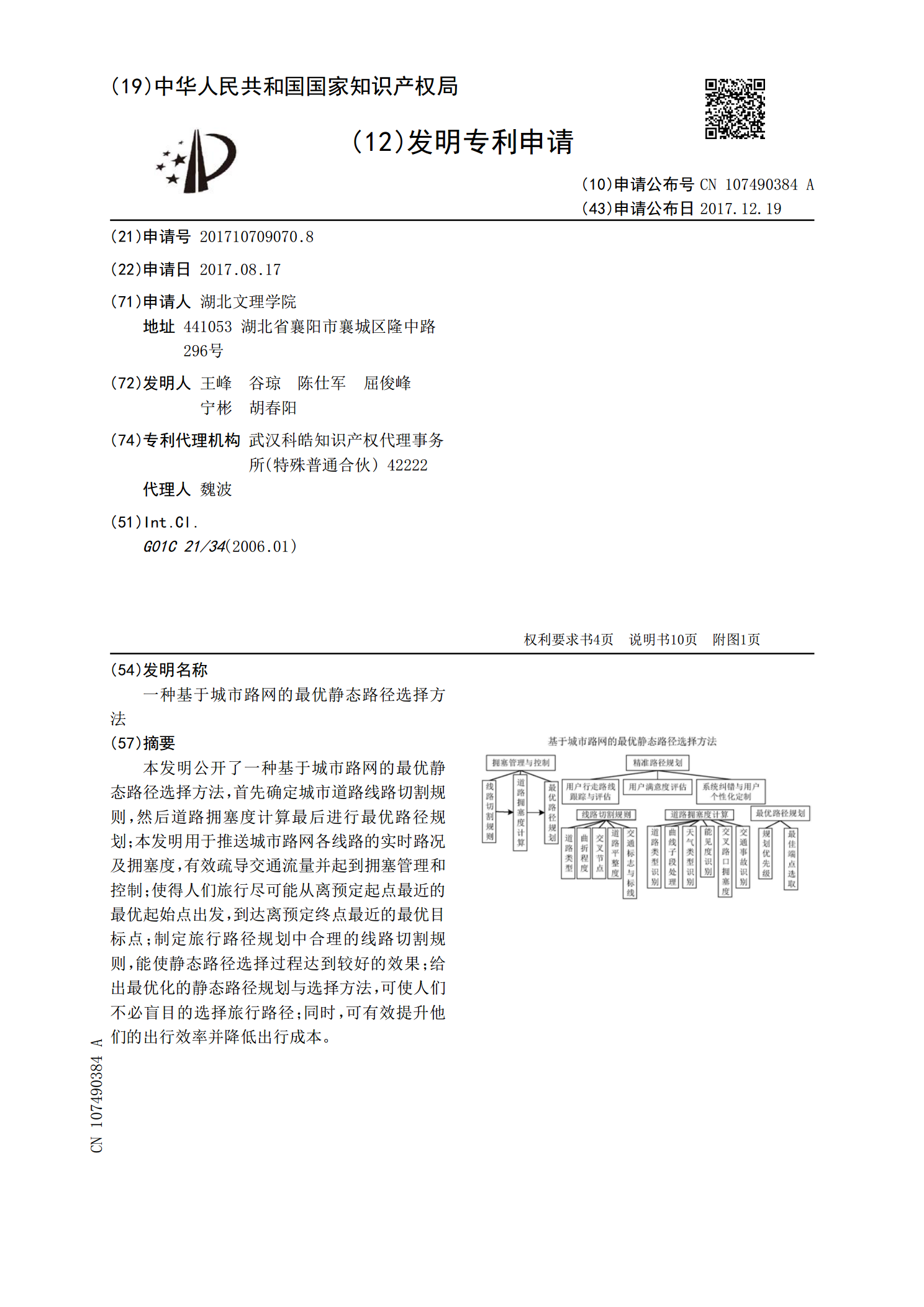
本发明公开了一种基于城市路网的最优静态路径选择方法,首先确定城市道路线路切割规则,然后道路拥塞度计算最后进行最优路径规划;本发明用于推送城市路网各线路的实时路况及拥塞度,有效疏导交通流量并起到拥塞管理和控制;使得人们旅行尽可能从离预定起点最近的最优起始点出发,到达离预定终点最近的最优目标点;制定旅行路径规划中合理的线路切割规则,能使静态路径选择过程达到较好的效果;给出最优化的静态路径规划与选择方法,可使人们不必盲目的选择旅行路径;同时,可有效提升他们的出行效率并降低出行成本。